跌落抑制方法和装置、伺服驱动器、伺服控制系统与流程
本发明涉及运动控制,尤其涉及一种跌落抑制方法、一种计算机可读存储介质、一种伺服驱动器、一种伺服控制系统和一种跌落抑制装置。
背景技术:
1、对于经济转型的契机对我国工业产业链升级提出了更高的要求,要求我们进行集约化的发展、工业自动化的发展,提高人力、资金、机械的使用效率。伺服系统是用来精确跟随和复制某一机械的反馈技术,是工业自动化必定应用的技术。这就要求伺服系统必须要具有高速、高精、高响应、高刚性的性能。工业生产中,如垂直运动的电机轴,或者六关节机器人中等机电系统经常受重力力矩作用。为保持机械臂断电后不跌落,往往使用带抱闸的电机,在上使能时,机械抱闸松开,如果没有补偿,负载会受重力影响跌落,再在闭环控制作用下回复到原位置,该现象也称为“点头”。
2、目前相关技术中为了避免点头现象的出现,或者减弱点头现象,主要为补偿类方法,通过辨识估算出所需重力电流,通过前馈的方式将该电流直接加入指令中,如模型计算法、离线辨识法和力平衡法等。模型计算法依赖精确的模型,同时实时计算负荷大,不适用于伺服驱动器处理,并且受负载或姿态变化,不同工况或位置所需的重力补偿电流不同。离线辨识存储法需要平衡存储空间与补偿精度的关系,且负载变化需要重新标定。力平衡法计算简单,但无法应对首次上电,且驱动器断电时未必进入力平衡状态,不能覆盖所有工况。综上,补偿类方法难以同时简单精确辨识所有工况所需电流。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种跌落抑制方法,响应于目标部件的使能信号或抱闸释放信号,将位置环增益由初始增益值调整为目标增益值,并基于调整后的位置环增益控制目标电机带动所述目标部件运动,从而能够减小部件在重力作用下的位置跌落,避免或者减弱了点头现象。
2、本发明的第二个目的在于提出一种计算机可读存储介质。
3、本发明的第三个目的在于提出一种伺服驱动器。
4、本发明的第四个目的在于提出一种伺服控制系统。
5、本发明的第五个目的在于提出一种跌落抑制装置。
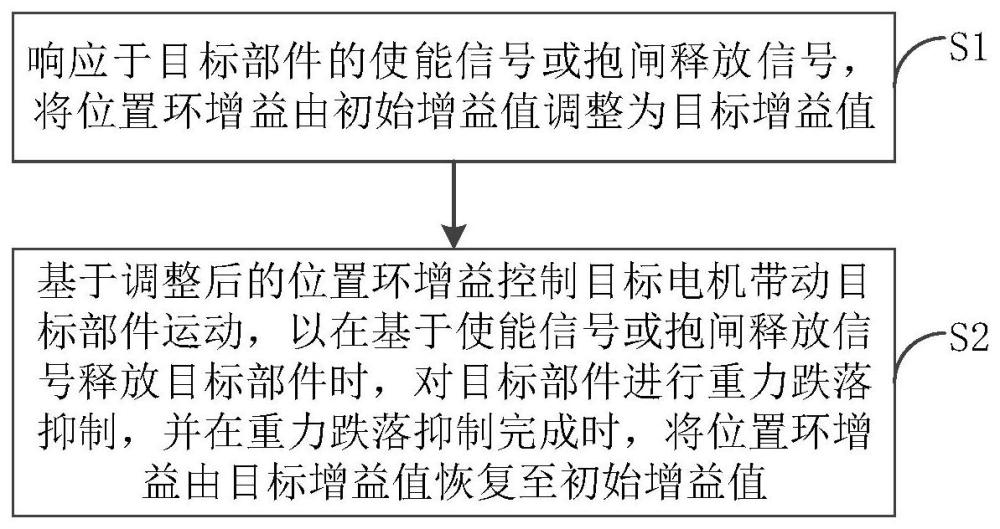
6、为达到上述目的,本发明第一方面实施例提出了一种跌落抑制方法,所述方法包括:响应于目标部件的使能信号或抱闸释放信号,将位置环增益由初始增益值调整为目标增益值;基于调整后的位置环增益控制目标电机带动所述目标部件运动,以在基于所述使能信号或抱闸释放信号释放所述目标部件时,对所述目标部件进行重力跌落抑制,并在重力跌落抑制完成时,将所述位置环增益由所述目标增益值恢复至所述初始增益值。
7、根据本发明实施例的跌落抑制方法,响应于目标部件的使能信号或抱闸释放信号,将位置环增益由初始增益值调整为目标增益值,基于调整后的位置环增益控制目标电机带动目标部件运动,以在基于使能信号或抱闸释放信号释放目标部件时,对目标部件进行重力跌落抑制,并在重力跌落抑制完成时,将位置环增益由目标增益值恢复至初始增益值。由此,该方法能够减小部件在重力作用下的位置跌落,避免或者减弱了点头现象。
8、另外,根据本发明上述实施例的跌落抑制方法还可以具有如下的附加技术特征:
9、根据本发明的一个实施例,所述将位置环增益由初始增益值调整为目标增益值,包括:将所述初始增益值阶跃至目标增益值;或者,将所述初始增益值逐步增大至所述目标增益值。
10、根据本发明的一个实施例,所述基于调整后的位置环增益控制目标电机带动所述目标部件运动,包括:获取所述目标电机的目标位置与实际位置之间的位置差值;将所述位置差值输入至位置调节器得到第一目标转速;获取所述第一目标转速与所述调整后的位置环增益的乘积,得到第二目标转速;基于所述第二目标转速控制所述目标电机带动所述目标部件运动。
11、根据本发明的一个实施例,所述位置调节器为比例调节器。
12、根据本发明的一个实施例,所述基于所述第二目标转速控制所述目标电机带动所述目标部件运动,包括:获取所述第二目标转速与所述目标电机的实际转速之间的转速差值;将所述转速差值输入至速度调节器得到目标电流;获取所述目标电流与所述目标电机的实际电流之间的电流差值;将所述电流差值输入至电流调节器得到目标电压;基于所述目标电压控制所述目标电机带动所述目标部件运动。
13、根据本发明的一个实施例,所述将所述位置环增益由所述目标增益值恢复至所述初始增益值,包括:将所述目标增益值阶跃至所述初始增益值;或者,将所述目标增益值逐步减小至所述初始增益值。
14、根据本发明的一个实施例,所述方法还包括:获取对所述目标部件进行重力跌落抑制的时长,在所述时长达到预设时长的情况下,确定对所述目标部件进行重力跌落抑制完成;或者,获取所述目标部件的目标位置与实际位置之间的位置差值,在所述位置差值小于预设差值的情况下,确定对所述目标部件进行重力跌落抑制完成;或者,获取所述目标部件的目标位置与实际位置之间的位置差值,在所述位置差值小于预设差值且持续预设时间的情况下,确定对所述目标部件进行重力跌落抑制完成。
15、为达到上述目的,本发明第二方面实施例提出了一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现上述的跌落抑制方法。
16、根据本发明实施例的计算机可读存储介质,通过执行时实现上述的跌落抑制方法,能够减小部件在重力作用下的位置跌落,避免或者减弱了点头现象。
17、为达到上述目的,本发明第三方面实施例提出的一种伺服驱动器,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时,实现上述的跌落抑制方法。
18、根据本发明实施例的伺服驱动器,通过执行上述的跌落抑制方法,能够减小部件在重力作用下的位置跌落,避免或者减弱了点头现象。
19、为达到上述目的,本发明第四方面实施例提出的一种伺服控制系统,包括机器人和上述的伺服驱动器,所述机器人包括目标部件,所述目标部件为机械臂。
20、根据本发明实施例的伺服控制系统,通过包括机器人和上述的伺服驱动器,能够减小部件在重力作用下的位置跌落,避免或者减弱了点头现象。
21、为达到上述目的,本发明第五方面实施例提出了一种跌落抑制装置,包括:调节模块,用于响应于目标部件的使能信号或抱闸释放信号,将位置环增益由初始增益值调整为目标增益值;控制模块,用于基于调整后的位置环增益控制目标电机带动所述目标部件运动,以在基于所述使能信号或抱闸释放信号释放所述目标部件时,对所述目标部件进行重力跌落抑制,并在重力跌落抑制完成时,将所述位置环增益由所述目标增益值恢复至所述初始增益值。
22、根据本发明实施例的跌落抑制装置,调节模块用于响应于目标部件的使能信号或抱闸释放信号,将位置环增益由初始增益值调整为目标增益值,控制模块用于基于增大后的位置环增益控制目标电机带动目标部件运动,以在基于使能信号或抱闸释放信号释放目标部件时,对目标部件进行重力跌落抑制,并在重力跌落抑制完成时,将位置环增益由目标增益值恢复至初始增益值。由此,该装置能够减小部件在重力作用下的位置跌落,避免或者减弱了点头现象。
23、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!