一种电机负载惯量辨识方法、装置、设备及介质与流程
本发明涉及电机控制,特别是涉及一种电机负载惯量辨识方法、装置、设备及介质。
背景技术:
1、现有的电机负载惯量辨识方法一般为:构建电机转矩与电机负载惯量、电机加速度、固定负载转矩之间的方程组,在该方程组中限制了电机加速度的最小值,使得电机在加速、减速过程的起始和结束阶段得到的电机负载惯量具有误差;另外,固定负载转矩的估算值也会有误差,进而导致得到的电机负载惯量具有误差。
2、鉴于上述存在的问题,寻求如何改善电机负载惯量出现误差是本领域技术人员竭力解决的问题。
技术实现思路
1、本发明的目的是提供一种电机负载惯量辨识方法、装置、设备及介质,用于解决因为限制电机加速度的最小值,使得电机在加速、减速过程的起始和结束阶段,通过采集得到的对应的数据计算得到的电机负载惯量具有误差,以及,对于未区分与电机运行方向相关的库仑力转矩,会导致固定负载转矩具有误差,进而导致得到的电机负载惯量具有误差的问题。
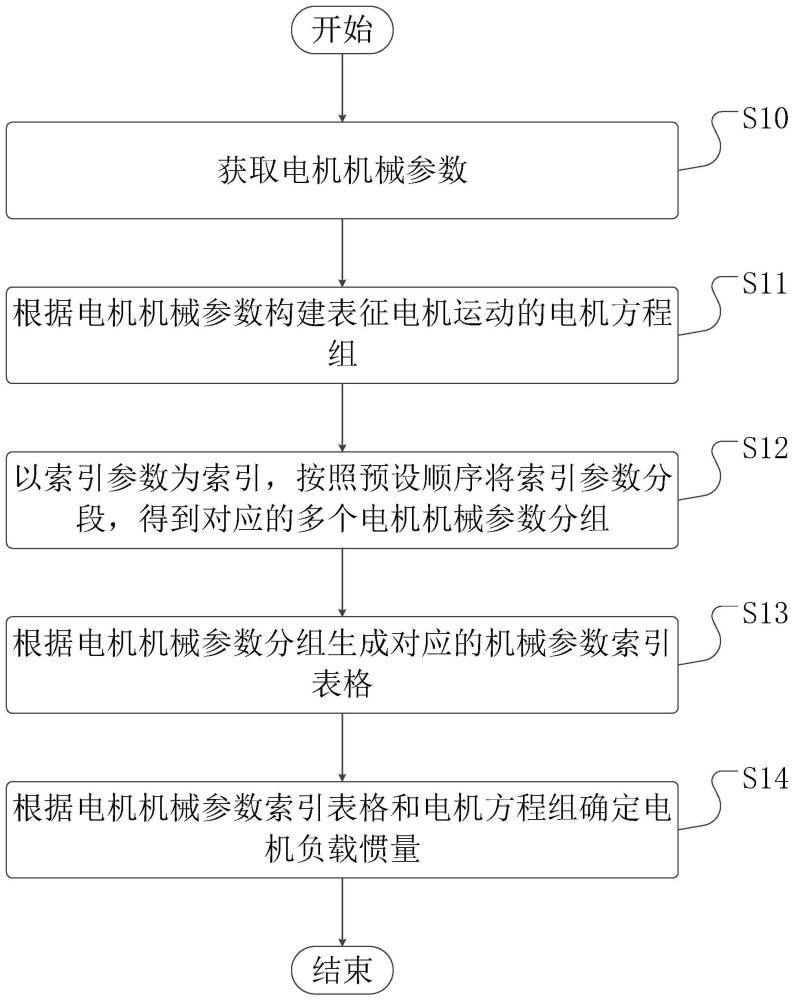
2、为解决上述技术问题,本发明提供一种电机负载惯量辨识方法,包括:
3、获取电机机械参数,其中,电机机械参数至少包括电机转矩、电机负载惯量、电机加速度、固定负载转矩、电机角速度、动摩擦因数、库仑力转矩中的任意一个或多个;
4、根据电机机械参数构建表征电机运动的电机方程组;其中,至少有一个方程根据库仑力转矩构建;
5、以索引参数为索引,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组;其中,索引参数为电机加速度、动摩擦因数、库仑力转矩中的任意一个;
6、根据电机机械参数分组生成对应的电机机械参数索引表格;
7、根据电机机械参数索引表格和电机方程组确定电机负载惯量。
8、另一方面,根据电机机械参数构建表征电机运动的电机方程组包括:
9、将电机负载惯量和电机加速度相乘,得到第一乘积;
10、将动摩擦因数和电机角速度相乘,得到第二乘积;
11、根据第一乘积、第二乘积、库仑力转矩、固定负载转矩之和确定电机方程组中的第一方程式;
12、根据库仑力转矩确定电机方程组中的第二方程式;
13、根据第一方程式和第二方程式构建电机方程组。
14、另一方面,在根据库仑力转矩确定电机方程组中的第二方程式之后,在根据第一方程式和第二方程式构建电机方程组之前,还包括:
15、获取电机惯量和机械负载惯量;
16、根据电机惯量和机械负载惯量之和与电机负载惯量的关系确定第三方程式;
17、对应的,根据电机机械参数构建表征电机运动的电机方程组包括:
18、根据第一方程式、第二方程式、第三方程式构建电机方程组。
19、另一方面,当以电机加速度为索引时,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组包括:
20、按照电机加速度由负到正的顺序排序;
21、获取电机的最大转矩值、电机惯量、电机额定加速度、电机标称最大惯量辨识范围值;
22、根据最大转矩值和电机惯量确定电机加速度的最大值;
23、根据电机额定加速度和电机标称最大惯量辨识范围值确定分段单位值;
24、根据电机加速度的最大值和分段单位值确定分组后得到的每个电机加速度分组的存储长度;
25、按照存储长度生成电机加速度索引表格;
26、对应的,根据电机机械参数索引表格和电机方程组确定电机负载惯量包括:
27、利用加速度搜索算法查找电机加速度索引表格中满足要求的电机加速度;
28、根据满足要求的电机加速度和电机方程组确定电机负载惯量。
29、另一方面,当以动摩擦因数为索引时,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组包括:
30、按照动摩擦因数由负到正的顺序排序;
31、对动摩擦因数按照预设分段单位进行分段,得到多个动摩擦因数分组并生成动摩擦因数索引表格;
32、对应的,根据电机机械参数索引表格和电机方程组确定电机负载惯量包括:
33、利用速度搜索算法查找动摩擦因数索引表格中满足要求的动摩擦因数;
34、根据满足要求的动摩擦因数和电机方程组确定电机负载惯量;
35、或,对满足要求的动摩擦因数使用最小二乘法进行拟合,得到拟合后的动摩擦因数;
36、根据拟合后的动摩擦因数和电机方程组确定电机负载惯量。
37、另一方面,当以库仑力转矩为索引时,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组包括:
38、获取正向库仑力和负向库仑力;
39、对正向库仑力和负向库仑力进行分组,得到正向库仑力组和负向库仑力组;
40、对应的,根据电机机械参数索引表格和电机方程组确定电机负载惯量包括:
41、当电机的运行速度的方向与正向库仑力的方向对应时,根据固定负载转矩和正向库仑力组对应的库仑力转矩之和确定正向合成负载转矩;
42、当电机的运行速度的方向与负向库仑力的方向对应时,根据固定负载转矩和负向库仑力组对应的库仑力转矩之差确定负向合成负载转矩;
43、根据正向合成负载转矩和负向合成负载转矩确定固定负载转矩和库仑力转矩;
44、根据固定负载转矩、库仑力转矩和电机方程组确定电机负载惯量。
45、另一方面,在获取电机机械参数之后,在根据电机机械参数构建表征电机运动的电机方程组之前,还包括:
46、在获取电机机械参数之后,在根据电机机械参数构建表征电机运动的电机方程组之前,还包括:
47、对电机机械参数进行低通滤波处理或平均值滤波处理。
48、为解决上述技术问题,本发明还提供了一种电机负载惯量辨识装置,包括:
49、第一获取模块,用于获取电机机械参数,其中,电机机械参数至少包括电机转矩、电机负载惯量、电机加速度、固定负载转矩、电机角速度、动摩擦因数、库仑力转矩中的任意一个或多个;
50、第一构建模块,用于根据电机机械参数构建表征电机运动的电机方程组;其中,至少有一个方程根据库仑力转矩构建;
51、分段模块,用于以索引参数为索引,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组;其中,索引参数为电机加速度、动摩擦因数、库仑力转矩中的任意一个;
52、第一生成模块,用于根据电机机械参数分组生成对应的电机机械参数索引表格;
53、第一确定模块,用于根据电机机械参数索引表格和电机方程组确定电机负载惯量。
54、此外,该装置还包括以下模块:
55、另一方面,根据电机机械参数构建表征电机运动的电机方程组包括:
56、第一相乘模块,用于将电机负载惯量和电机加速度相乘,得到第一乘积;
57、第二相乘模块,用于将动摩擦因数和电机角速度相乘,得到第二乘积;
58、第二确定模块,用于根据第一乘积、第二乘积、库仑力转矩、固定负载转矩之和确定电机方程组中的第一方程式;
59、第三确定模块,用于根据库仑力转矩确定电机方程组中的第二方程式;
60、第二构建模块,用于根据第一方程式和第二方程式构建电机方程组。
61、另一方面,在根据库仑力转矩确定电机方程组中的第二方程式之后,在根据第一方程式和第二方程式构建电机方程组之前,还包括:
62、第二获取模块,用于获取电机惯量和机械负载惯量;
63、第四确定模块,用于根据电机惯量和机械负载惯量之和与电机负载惯量的关系确定第三方程式;
64、对应的,根据电机机械参数构建表征电机运动的电机方程组包括:
65、第三构建模块,用于根据第一方程式、第二方程式、第三方程式构建电机方程组。
66、另一方面,当以电机加速度为索引时,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组包括:
67、第一排序模块,用于按照电机加速度由负到正的顺序排序;
68、第三获取模块,用于获取电机的最大转矩值、电机惯量、电机额定加速度、电机标称最大惯量辨识范围值;
69、第五确定模块,用于根据最大转矩值和电机惯量确定电机加速度的最大值;
70、第六确定模块,用于根据电机额定加速度和电机标称最大惯量辨识范围值确定分段单位值;
71、第七确定模块,用于根据电机加速度的最大值和分段单位值确定分组后得到的每个电机加速度分组的存储长度;
72、第二生成模块,用于按照存储长度生成电机加速度索引表格;
73、对应的,根据电机机械参数索引表格和电机方程组确定电机负载惯量包括:
74、第一查找模块,用于利用加速度搜索算法查找电机加速度索引表格中满足要求的电机加速度;
75、第八确定模块,用于根据满足要求的电机加速度和电机方程组确定电机负载惯量。
76、另一方面,当以动摩擦因数为索引时,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组包括:
77、第二排序模块,用于按照动摩擦因数由负到正的顺序排序;
78、第三生成模块,用于对动摩擦因数按照预设分段单位进行分段,得到多个动摩擦因数分组并生成动摩擦因数索引表格;
79、对应的,根据电机机械参数索引表格和电机方程组确定电机负载惯量包括:
80、第二查找模块,用于利用速度搜索算法查找动摩擦因数索引表格中满足要求的动摩擦因数;
81、第九确定模块,用于根据满足要求的动摩擦因数和电机方程组确定电机负载惯量;
82、或,拟合模块,用于对满足要求的动摩擦因数使用最小二乘法进行拟合,得到拟合后的动摩擦因数;
83、第十确定模块,用于根据拟合后的动摩擦因数和电机方程组确定电机负载惯量。
84、另一方面,当以库仑力转矩为索引时,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组包括:
85、第四获取模块,用于获取正向库仑力和负向库仑力;
86、分组模块,用于对正向库仑力和负向库仑力进行分组,得到正向库仑力组和负向库仑力组;
87、对应的,根据电机机械参数索引表格和电机方程组确定电机负载惯量包括:
88、第十一确定模块,用于当电机的运行速度的方向与正向库仑力的方向对应时,根据固定负载转矩和正向库仑力组对应的库仑力转矩之和确定正向合成负载转矩;
89、第十二确定模块,用于当电机的运行速度的方向与负向库仑力的方向对应时,根据固定负载转矩和负向库仑力组对应的库仑力转矩之差确定负向合成负载转矩;
90、第十三确定模块,用于根据正向合成负载转矩和负向合成负载转矩确定固定负载转矩和库仑力转矩;
91、第十四确定模块,用于根据固定负载转矩、库仑力转矩和电机方程组确定电机负载惯量。
92、另一方面,在获取电机机械参数之后,在根据电机机械参数构建表征电机运动的电机方程组之前,还包括:
93、处理模块,用于对电机机械参数进行低通滤波处理或平均值滤波处理。
94、为解决上述技术问题,本发明还提供了一种电机负载惯量辨识设备,包括:
95、存储器,用于存储计算机程序;
96、处理器,用于执行计算机程序,实现电机负载惯量辨识方法的步骤。
97、为解决上述技术问题,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时,实现上述全部电机负载惯量辨识方法的步骤。
98、本发明所提供的一种电机负载惯量辨识方法,包括:获取电机机械参数,其中,电机机械参数至少包括电机转矩、电机负载惯量、电机加速度、固定负载转矩、电机角速度、动摩擦因数、库仑力转矩中的任意一个或多个;根据电机机械参数构建表征电机运动的电机方程组;其中,至少有一个方程根据库仑力转矩构建;此时,对于与电机运行方向相关的库仑力转矩进行区分,避免了固定负载转矩的误差,进而避免了电机负载惯量的误差;以索引参数为索引,按照预设顺序将索引参数分段,得到对应的多个电机机械参数分组;其中,索引参数为电机加速度、动摩擦因数、库仑力转矩中的任意一个;根据电机机械参数分组生成对应的电机机械参数索引表格;根据电机机械参数索引表格和电机方程组确定电机负载惯量。此时通过设置电机机械参数索引表格避免了只使用单一的电机加速度确定电机负载惯量,并避免了因为限制电机加速度的最小值导致得到的电机负载惯量具有误差。
99、本发明还提供了一种电机负载惯量辨识装置、设备及介质,效果同上。
- 还没有人留言评论。精彩留言会获得点赞!