基于新型锁相环的离散时域永磁同步电机无位置传感器控制方法
本发明涉及电机控制,尤其涉及一种基于新型锁相环的离散时域永磁同步电机无位置传感器控制方法。
背景技术:
1、永磁同步电机以其效率高,功率密度高,转矩密度高被广泛地运用于航空航天,交通运输领域。高性能电机驱动通常采用矢量控制技术,在矢量控制过程中,实时转子位置必不可少。通常采用在电机上安装机械式位置传感器的方式来获得转子位置,然而由于空间、成本和使用环境的限制,安装位置传感器在一些应用场景下存在安装困难、可靠性低的问题,为了降低系统成本,减小系统的体积,以及提升控制系统的可靠性,无位置传感器控制技术被提出和使用。
2、永磁同步电机无位置传感器控制方法可以分为两类:一类是适用于零低速的高频信号注入法。另一类是适用于中高速下基于反电势或磁通模型的算法,如滑模观测器法、扩展卡尔曼滤波器法、模型参考自适应法、龙伯格观测器法等。滑模观测器作为反电势观测器的一种,因其算法简单、鲁棒性高的优势获得了广泛的研究。
3、而在永磁同步电机的无位置传感器控制方案中,如何更准确地估计电角度,并抑制了传统角度估计方法中随转速上升而增大的角度误差,成为了需要研究的课题。
技术实现思路
1、本发明的实施例提供一种基于新型锁相环的离散时域永磁同步电机无位置传感器控制方法,能够更准确地估计电角度,并抑制了传统角度估计方法中随转速上升而增大的角度误差,成为了需要研究的课题。
2、为达到上述目的,本发明的实施例采用如下技术方案:
3、一种基于新型锁相环的离散时域永磁同步电机无位置传感器控制方法,包括:
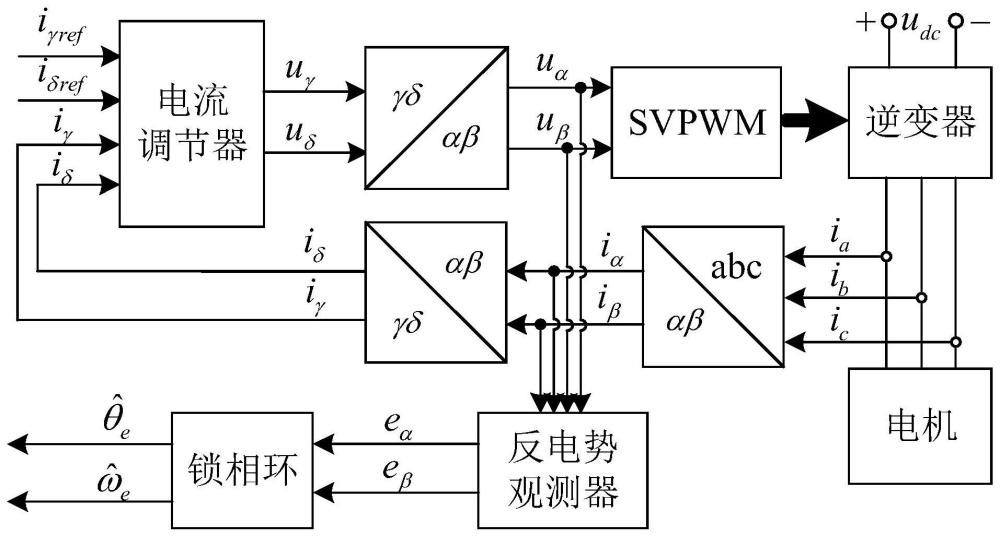
4、采集永磁同步电机的电流数据,并输入电流调节器,其中,所采集的电流数据包括:所述永磁同步电机的a,b,c三相电流ia,ib,ic,和,通过park以及clark坐标变换得到γ轴电流iγ和δ轴电流iδ;其中,建立完全离散的永磁同步电机复矢量模型,并设计电流调节器;采集永磁同步电机的a,b,c三相电流ia,ib,ic,通过park以及clark坐标变换得到γ轴电流iγ和δ轴电流iδ;将给定电机的γ轴参考电流iγref,给定δ轴参考电流iδref,和得到的电机电流iγ,iδ输入电流调节器,得到γ轴电压uγ,δ轴电压uδ;将uγ,uδ进行反park变换,得到α轴电压uα,β轴电压uβ;将电压uα,uβ输入svpwm空间矢量调制模块后,通过控制逆变器开关管的导通状态,实现了对永磁同步电机的驱动控制。
5、将所述电流调节器输出的电压数据经过反park变换处理结果,和αβ坐标系下的定子电流,输入滑模反电势观测器;其中,根据离散时间反电动势模型,建立精确锁相环,从观测反电势中提取位置信号,从而实现上述坐标变换。
6、所述滑模反电势观测器输出αβ坐标系下的反电动势估计值到锁相环,锁相环输出观测转子位置电角度和电角速度即获得了电机转子位置及转速信息,以实现电机的高性能矢量控制。
7、同时还包括:将所述电流调节器输出的电压数据经过反park变换处理后,输入svpwm空间矢量调制模块,其中,所述电压数据包括:γ轴电压uγ和δ轴电压uδ;所述svpwm空间矢量调制模块通过控制逆变器开关管的导通状态,对所述永磁同步电机进行驱动控制。其中,根据离散化电机模型建立滑模反电势观测器,由控制环路中实时电压uα、uβ和电流iα、iβ通过滑模观测器即获得永磁同步电机的反电动势估计值eα、eβ。
8、所述将所述电流调节器输出的电压数据经过反park变换处理,包括:将uγ,uδ进行反park变换,得到α轴电压uα,β轴电压uβ,并将uα和uβ输入所述svpwm空间矢量调制模块。
9、所述电流调节器中运行所述永磁同步电机的复矢量模型,包括所述复矢量模型为一种完全离散化的表贴式永磁同步电机模型,其在两相旋转坐标系dq下表达式为:
10、idq(k+1)=aidq(k)+b(m-1(ωe(k-1)ts)udq(k-1)-edq(k))
11、其中:
12、
13、式中,idq为dq坐标系下的电流矩阵,udq为dq坐标系下的电压矩阵,edq为dq坐标系下的反电势矩阵,a为系数矩阵(表达式如上式所示),b为系数矩阵(表达式如上式所示),m-1(ωe(k-1)ts)为系数矩阵(表达式如上式所示),为电机转子磁链,id为d轴定子电流,iq为q轴定子电流,ud为d轴定子电压,uq为q轴定子电压,ed为d轴反电动势,eq为q轴反电动势,rs为定子电阻,ls为定子电感,ωe为电角速度,ts为采样周期,k表示采样时刻。
14、所述电流调节器中运行所述永磁同步电机的复矢量模型,还包括永磁同步电机在估计两相旋转坐标系γδ下电机模型,包括:
15、iγδ(k+1)=aiγδ(k)+b(m-1(ωe(k-1)ts)uγδ(k-1)-eγδ(k))
16、其中:
17、
18、式中:iγδ为γδ坐标系下的电流矩阵,uγδ为γδ坐标系下的电压矩阵,eγδ为γδ坐标系下的反电势矩阵,θerr为dq坐标系与γδ坐标系间的角度误差,iγ为γ轴定子电流,iδ为δ轴定子电流,uγ为γ轴定子电压,uδ为δ轴定子电压,eγ为γ轴反电动势,eδ为δ轴反电动势。基于此γδ坐标系下的电机精确离散化电机模型,设计离散时域电流调节器,提升电流环的控制性能。
19、所述滑模反电势观测器基于完全离散化的模型设计,从而减少观测器数字化实现的过程中性能的损失。其中包括;
20、利用dq坐标系对模型进行坐标变换,得到在两相静止坐标系αβ下的精确离散化模型:
21、
22、式中:iα、iβ为αβ坐标系下的定子电流;uα、uβ为αβ坐标系下的定子电压;eα、eβ为αβ坐标系下的反电动势。
23、进一步的,还包括:利用所述两相静止坐标系αβ下的精确离散化模型,建立αβ坐标系下精确的离散化反电势模型为:
24、所建立的滑模反电势观测器包括:式中:表示iα、iβ的观测值,zα、zβ为引入的滑模观测器的控制函数。
25、k为滑模增益,a>0,用于调整sigmoid函数的斜率,分别为定子电流观测误差。即在控制函数的作用下,滑模观测器达到稳定时即观测电流误差为零时,观测所得的zα、zβ中即含有反电势信号,再通过低通滤波器滤除高次谐波提取反电势信号。离散时域的低通滤波器表达式如下:
26、式中:ωc为低通滤波器的截止频率。将上述zα,zβ输入滤波器,即可得到观测反电势信号eα,eβ。
27、所述锁相环精度依据离散时域反电势模型设计,能够减小转子位置角度观测误差。
28、由离散化反电势公式推得两坐标系之间角度观测误差θerr(即实际转子位置角度θe与观测转子位置角度的误差)表达式如下:以此表达式为基础设计锁相环结构,将滑模反电势观测结果eα,eβ输入即可得到转子位置角度即实现了永磁同步电机无位置传感器转子位置检测。
29、本发明实施例提供的基于新型锁相环的离散时域永磁同步电机无位置传感器控制方法,通过建立永磁同步电动机的离散时域复矢量模型,并依此设计电流调节器;基于电机精确离散状态空间模型设计离散化滑模反电动势观测器,观测电机的反电势;基于离散反电动势模型建立新型锁相环,可以更准确地估计电角度,有效地抑制了传统角度估计方法中随转速上升而增大的角度误差。该无位置传感器控制方法能够有效地提升转子位置观测精度,并且直接在离散时域内设计算法,降低了算法数字化实现过程的误差。
- 还没有人留言评论。精彩留言会获得点赞!