一种用于输电线路安装作业的机器人的制作方法
本发明涉及防振锤安装,具体而言,涉及一种用于输电线路安装作业的机器人。
背景技术:
1、防振锤,是为了减少导线因风力扯起振动而设的。高压架空线路杆位较高,档距较大,当导线受到风力作用时,会发生振动。导线振动时,导线悬挂处的工作条件最为不利。由于多次振动,导线因周期性的弯折会发生疲劳破坏。当架空线路档距大于120米时,一般采用防振锤防振。
2、现有技术中,工人在安装输电线路的防振锤时,需要逐个爬上铁塔,铁塔之间跨度较远,且铁塔通常不是搭建在道路边缘,而工人在铁塔之间移动时,需要花费较长时间的野外跋涉,且还需要爬上铁塔,耗费大量体力和时间,这不仅降低了工作效率,还增加了工人的劳动强度,并导致施工进度延迟。
3、然后,人工攀附在输电线路上,将防振锤钩在上下平行的两根输电线路上,接着通过铰丝将防振锤缠绕在输电线路上,使防振锤被牢牢固定在输电线路上,人工攀附和安装防振锤的过程存在一定的风险,由于工人需要在输电线路上移动,输电线路会晃动,这给施工人员带来了困难和不安全因素,施工人员可能面临困难的稳定移动,甚至有坠落的风险,从而引发严重的安全隐患。
技术实现思路
1、本发明的目的在于克服防振锤难以安装在输电线路上,并且施工人员在输电线路上移动,存在安全隐患的缺点,提供一种机器人,其能自动安装防振锤,不用人工安装防振锤,提高工作效率。
2、本发明的另一目的在于提供一种具备上述功能的用于输电线路安装作业的机器人。
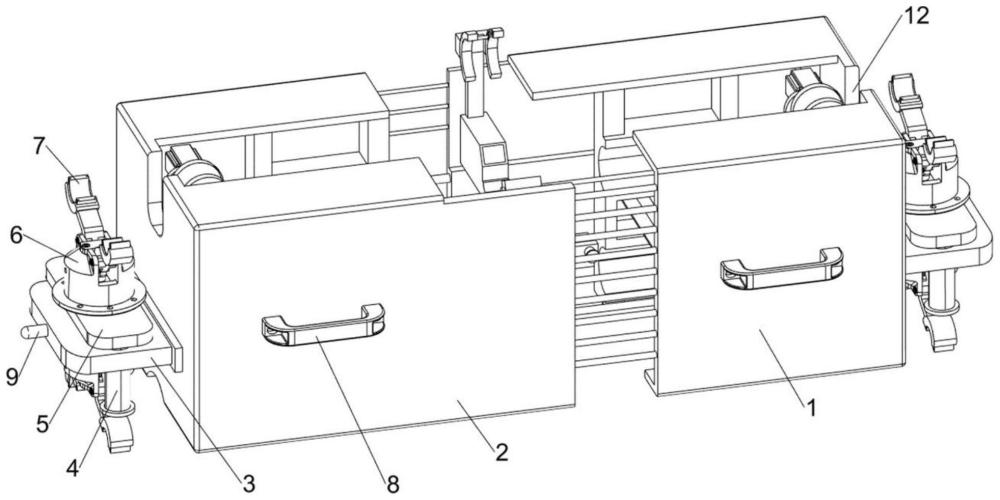
3、本发明的实施例通过以下技术方案实现:一种用于输电线路安装作业的机器人,包括有罩壳一、罩壳二和移动组件;罩壳一滑动连接有罩壳二;罩壳一和罩壳二共同连接有用于在输电线路上移动的移动组件;还包括有安装板、电动推杆一、连接板、电动夹持器、弧形块、把手、传感器、备料组件、预固定组件和缠绕组件;罩壳一和罩壳二的相背侧各固接有一个安装板;每个安装板上固接有若干个电动推杆一;同一个安装板上的若干个电动推杆一伸缩部共同固接有一个连接板;每个安装板的上表面和每个连接板的下表面各固接有一个电动夹持器;每个电动夹持器上的两个夹爪上各阻尼式滑动连接有一个弧形块,且两个弧形块合并后形成圆筒状,弧形块的内弧面为耐磨光滑材质;罩壳一和罩壳二分别安装有把手;安装板的相背侧各安装有一个用于检测移动距离的传感器;罩壳一和罩壳二的内前部连接有用于存放防振锤和铰丝的备料组件;罩壳一和罩壳二的内中部连接有用于将防振锤卡在输电线路上的预固定组件;罩壳一和罩壳二的内后部连接有用于将铰丝缠绕在防振锤上的缠绕组件。
4、进一步说明,移动组件包括有电动推杆二、固定座、电动推杆三、安装支架、电机一和输送轮;罩壳一和罩壳二的内前壁各固接有一个电动推杆二;每个电动推杆二上各固接有一个固定座;每个固定座上固接有一个电动推杆三,且电动推杆三为双向推杆;每个电动推杆三的两个伸缩部各固接有一个安装支架;每个安装支架的前侧面各固接有一个电机一;每个电机一的输出轴固接有一个输送轮。
5、进一步说明,罩壳一和罩壳二上均开设有一个弧形槽和一个避让槽。
6、进一步说明,每个安装板均为电动伸缩板,可延伸至与防振锤相等的距离。
7、进一步说明,罩壳一和罩壳二上设置有锁扣结构。
8、进一步说明,备料组件包括有安装块一、限位块、电动推杆四、承接块、电磁铁一、防掉单元和夹持单元;罩壳一和罩壳二的内部各固接有一个安装块一;两个安装块一的相向侧各固接有一个限位块,且两个限位块分别与对应的罩壳一和罩壳二固接;每个限位块上开设有两个存放槽;罩壳一的内后壁上部和内后壁下部各固接有一个电动推杆四;每个电动推杆四的伸缩部各固接有一个承接块;每个承接块上设置有一个电磁铁一;两个承接块的相背侧各连接有一个用于防止防振锤从输电线路上掉落的防掉单元,且两个防掉单元呈上下对称分布;位于下方的防掉单元连接有两个用于夹持住铰丝,防止铰丝掉落的夹持单元,且两个夹持单元呈左右对称分布。
9、进一步说明,防掉单元包括有安装块二、弧形板、限位杆一和弹性件一;承接块固接有安装块二;安装块二的前部固接有两个弧形板;每个弧形板上开设有一个弧形滑槽;两个弧形滑槽内滑动连接有限位杆一;每个弧形滑槽内固接有一个弹性件一;限位杆一与两个弧形滑槽内的弹性件一固接。
10、进一步说明,位于左方的夹持单元包括有电动推杆五、楔形块、固定块、托块、限位杆二、弹性件二、滑板和压块;下方的安装块二的左部固接有电动推杆五;电动推杆五的伸缩部固接有楔形块;下方弧形板的左侧面固接有固定块;固定块上开设有三个活动槽;每个活动槽上通过扭簧转动连接有一个托块;固定块的外弧面固接有两个限位杆二;每个限位杆二上各套接有一个弹性件二;两个限位杆二上共同滑动连接有滑板;滑板与两个弹性件二固接;滑板上固接有三个压块,且三个压块与三个托块一一对应;滑板与楔形块接触。
11、进一步说明,预固定组件包括有电动滑轨一、电动滑块一、安装架、电动推杆六、固定板一、电机二、圆块、滑杆和电磁铁二;罩壳一和罩壳二的内侧壁各固接有一个电动滑轨一,并且两个电动滑轨一呈左右对称分布;每个电动滑轨一上各滑动连接有一个电动滑块一;每个电动滑块一上固接有一个安装架;每个安装架上固接有两个电动推杆六;同一个安装架的电动推杆六的伸缩部共同固接有一个固定板一;两个固定板一的相背侧各固接有一个电机二;两个电机二的输出轴各固接有一个圆块;每个圆块上设置有一个半圆槽;两个圆块相向侧各固接有一个滑杆;两个滑杆上共同滑动连接有电磁铁二。
12、进一步说明,缠绕组件包括有动力单元、固定板、电动推杆七、连接块、电动推杆八、u型板、滑动板、滚轮和限位柱;罩壳二的内前壁连接有动力单元;动力单元上连接有固定板;固定板上固接有两个电动推杆七;两个电动推杆七的伸缩部共同固接有连接块;连接块上表面和下表面各固接有一个电动推杆八,且电动推杆八为双向推杆;两个电动推杆八上同一侧的伸缩部均共同固接有一个u型板;每个u型板上各滑动连接有一个滑动板;每个u型板的端部各设置有两个滚轮,且每个滚轮上均设置有微型电机;每个滑动板的内弧面固接有若干个呈等距分布的限位柱,且每个限位柱表面设置有一层橡胶套。
13、相对于现有技术,本发明具有以下优点:
14、本发明通过上述设计得到的用于输电线路安装作业的机器人,通过托块和压块对铰丝进行限制,防止铰丝在移动过程中掉落。
15、本发明通过上述设计得到的用于输电线路安装作业的机器人,通过弧形板一和限位杆一对防振锤的卡线部进行限位和牵引,让防振锤预固定在输电线路上,避免防振锤在预固定过程中,从输电线路上脱离掉落,导致防振锤预固定不成功。
16、本发明通过上述设计得到的用于输电线路安装作业的机器人,通过限位柱的橡胶套增加限位柱与每根铰丝的摩擦力,让每根铰丝在受到限位柱转动的推力时,还被相邻的两个限位柱夹持住带着往相对的方向移动,使得每根铰丝更加贴合在输电线路的表面,实现对防振锤的安装。
17、本发明通过上述设计得到的用于输电线路安装作业的机器人,通过本安装机器人带着防振锤和铰丝在输电线路上移动,移至需要的位置,将防振锤安装在输电线路上,不仅提高防振锤的安装效率,减轻施工人员的工作强度,还消除了施工人员安装防振锤的安全隐患。
- 还没有人留言评论。精彩留言会获得点赞!