一种太阳能光伏板智能清洁机器人
本技术涉及一种清洁机器人,尤其涉及一种太阳能光伏板智能清洁机器人。
背景技术:
1、近年来,我国以光伏发电为代表的新能源发展成效显著,装机规模稳居全球首位,光伏能源作为可再生能源,助力实现“碳中和”目标,具备较为广阔的增长空间。光伏发电的实际布置形式也多种多样,不仅有大面积规模化布置,还有路灯杆上设置的太阳能光伏板。
2、无论何种形式的光伏板,其均是长期暴露在外界风吹日晒,光伏板的表面容易附着、积攒灰尘以影响光伏板的发电效率,对此,在本领域中研制有针对光伏板的自动清洁的清洁工具,通过水洗的方式进行清洁,但水洗的方式,灰尘的清除仅仅停留在从光伏玻璃表面驱除的阶段,驱除后的灰尘不俘获和固定,会发生二次覆盖,简单说就是一边干净,另一边更脏;
3、此外,针对路灯杆上设置的太阳能光伏板,由于其高度限制,现有的自动清洁工具不具备自主行进至高处光伏板所在的位置进行主动清洁,需要人工辅助放置,如此便违背了“自动”的初衷,变成一种人工辅助的伪自动清洁,效率低,不符合未来的发展需要,不仅如此,现有的清洁工具在倾斜度较大的光伏板表面,自身的抓地性能堪忧,存在移位、滑落风险,更不用说能够做好清洁工作。
技术实现思路
1、为了解决上述技术所存在的不足之处,本实用新型提供了一种太阳能光伏板智能清洁机器人
2、为了解决以上技术问题,本实用新型采用的技术方案是:它包括爬杆机器人和清洁机器人,爬杆机器人攀附在路灯杆上且通过一侧的置放输送平台携带吸附在置放输送平台上的清洁机器人;
3、爬杆机器人包括有至少四条相互插接啮合围绕成四边形的主体杆,主体杆上配置有与主体杆的齿段限位啮合的拉栓;
4、清洁机器人包括有机体、吸盘履带、刮板装置。
5、进一步地,主体杆形成有齿段和连接段,连接段上开设有插接齿段的贯穿开口。
6、进一步地,拉栓内伸在连接段中且拉栓内伸的自由端且靠近贯穿开口的位置形成有与主体杆的齿段相互啮合的齿体。
7、进一步地,多个主体杆相互插接啮合时,任意单个主体杆的齿段插接在相邻的主体杆的连接段的贯穿开口中。
8、进一步地,主体杆的连接段上安装有的转动轮,转动轮靠近主体杆的齿段且位于至少四条主体杆共同围绕成的四边形内,则四个转动轮之间共同形成容纳路灯杆的空隙。
9、进一步地,其中一条主体杆的连接段的外侧安装有支撑架,支撑架上孔位配合有滑动连接的滑块以及通过滑块牵引且向外延伸的支撑摇杆。
10、进一步地,支撑摇杆的自由端连接在置放输送平台上,置放输送平台的一端与支撑架的自由端转动配合,转动配合以支撑摇杆跟随滑块滑动进而牵引改变支撑摇杆的倾斜角度的同时改变置放输送平台的倾斜角度的方式实施。
11、进一步地,清洁机器人还包括有配置在机体两侧的主动轮以及与主动轮配合形成四轮结构的从动轮,单侧主动轮和从动轮上共同套接有布满吸盘的吸盘履带,
12、主动轮以通过内置在机体中的马达驱动的方式实施,
13、从动轮以与主动轮共同张紧吸盘履带且随动的方式实施。
14、进一步地,机体的上表面安装有吸尘桶,吸尘桶的一端内安装有通过马达驱动的吸尘风扇,吸尘桶的另一端连接有向下延伸至刮板装置上方的吸尘通道。
15、进一步地,刮板装置的刮刃与吸盘履带的最低水平位置一致。
16、本实用新型公开了一种太阳能光伏板智能清洁机器人,通过爬杆机器人的调整配合能够适配不同直径的路灯杆,兼容性强,置放输送平台的倾斜角度可以调节以匹配不同倾斜角度的光伏板,置放输送平台上能够携带吸附在其上的清洁机器人,清洁机器人通过吸附和履带传动行进,抓地力强、行进流畅度高,清洁机器人的清洁作业具备表面清理及辅助的吸尘清理,清洁效率高、清洁效果好。
技术特征:
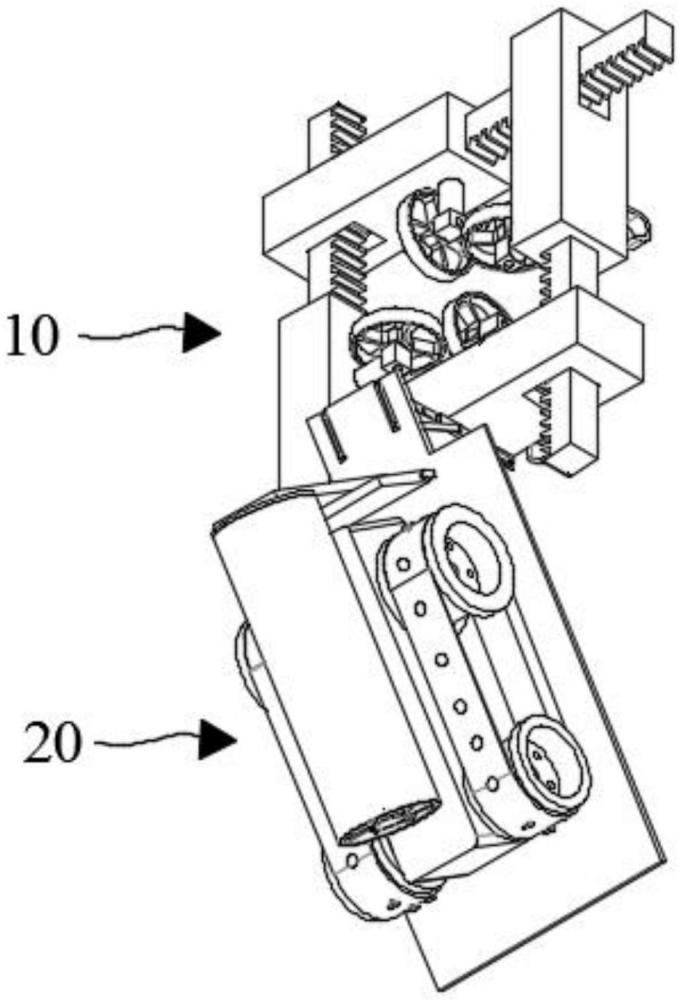
1.一种太阳能光伏板智能清洁机器人,其特征在于:它包括爬杆机器人(10)和清洁机器人(20),所述爬杆机器人(10)攀附在路灯杆上且通过一侧的置放输送平台(15)携带吸附在所述置放输送平台(15)上的清洁机器人(20);
2.根据权利要求1所述的太阳能光伏板智能清洁机器人,其特征在于:所述主体杆(16)形成有齿段和连接段,所述连接段上开设有插接齿段的贯穿开口。
3.根据权利要求2所述的太阳能光伏板智能清洁机器人,其特征在于:所述拉栓(11)内伸在所述连接段中且拉栓(11)内伸的自由端且靠近所述贯穿开口的位置形成有与主体杆(16)的齿段相互啮合的齿体。
4.根据权利要求2所述的太阳能光伏板智能清洁机器人,其特征在于:多个所述主体杆(16)相互插接啮合时,任意单个主体杆(16)的齿段插接在相邻的主体杆(16)的连接段的贯穿开口中。
5.根据权利要求2所述的太阳能光伏板智能清洁机器人,其特征在于:所述主体杆(16)的连接段上安装有的转动轮(17),所述转动轮(17)靠近主体杆(16)的齿段且位于至少四条主体杆(16)共同围绕成的四边形内,则四个转动轮(17)之间共同形成容纳路灯杆的空隙。
6.根据权利要求2所述的太阳能光伏板智能清洁机器人,其特征在于:其中一条所述主体杆(16)的连接段的外侧安装有支撑架(13),所述支撑架(13)上孔位配合有滑动连接的滑块(12)以及通过所述滑块(12)牵引且向外延伸的支撑摇杆(14)。
7.根据权利要求6所述的太阳能光伏板智能清洁机器人,其特征在于:所述支撑摇杆(14)的自由端连接在置放输送平台(15)上,所述置放输送平台(15)的一端与支撑架(13)的自由端转动配合,所述转动配合以支撑摇杆(14)跟随滑块(12)滑动进而牵引改变支撑摇杆(14)的倾斜角度的同时改变置放输送平台(15)的倾斜角度的方式实施。
8.根据权利要求1所述的太阳能光伏板智能清洁机器人,其特征在于:所述清洁机器人(20)还包括有配置在机体(21)两侧的主动轮(22)以及与所述主动轮(22)配合形成四轮结构的从动轮(23),单侧所述主动轮(22)和从动轮(23)上共同套接有布满吸盘的吸盘履带(24),
9.根据权利要求1所述的太阳能光伏板智能清洁机器人,其特征在于:所述机体(21)的上表面安装有吸尘桶(25),所述吸尘桶(25)的一端内安装有通过马达驱动的吸尘风扇(26),吸尘桶(25)的另一端连接有向下延伸至刮板装置(27)上方的吸尘通道(28)。
10.根据权利要求1所述的太阳能光伏板智能清洁机器人,其特征在于:所述刮板装置(27)的刮刃与吸盘履带(24)的最低水平位置一致。
技术总结
本技术公开了一种太阳能光伏板智能清洁机器人,它包括爬杆机器人和清洁机器人,爬杆机器人攀附在路灯杆上且通过一侧的置放输送平台携带吸附在置放输送平台上的清洁机器人一同爬升或下落,爬杆机器人包括有至少四条相互插接啮合围绕成四边形的主体杆,主体杆上配置有与主体杆的齿段限位啮合的拉栓,清洁机器人包括有机体、吸盘履带、刮板装置;本技术通过爬杆机器人的调整配合能够适配不同直径的路灯杆,兼容性强,置放输送平台能匹配不同倾斜角度的光伏板,且能够携带清洁机器人,清洁机器人通过吸附和履带传动行进,抓地力强、行进流畅度高,清洁机器人的清洁作业具备表面清理及辅助的吸尘清理,清洁效率高、清洁效果好。
技术研发人员:张凯翔,隋美娥,赵烽伊,李英帅,王宏伟,王鑫腾,王晓玥,黄超,郭艳雪
受保护的技术使用者:青岛港湾职业技术学院
技术研发日:20230615
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!