光伏清洁机器人以及清洁系统的制作方法
本技术涉及光伏面板清洁,具体涉及一种光伏清洁机器人以及清洁系统。
背景技术:
1、光伏面板大多数材料为硅,其可以利用半导体材料在光照条件下发生伏特效应,从而将太阳能直接转换为电能。为保证发电效率,光伏面板多相对于水平面倾斜一角度。
2、当多个光伏面板排布形成光伏面板阵列时,将一个或者两个光伏面板沿其长度排列为一个单元后,沿光伏面板的宽度方向阵列上述单元即可形成光伏面板阵列。
3、光伏面板通过面板支架安装至地面,由于光伏面板阵列的铺设面积较大,地面存在许多低洼和凸起,因此只能在一定区域内保持平整,无法保证全部的架设地面均为高度一致的平整表面。当多个光伏面板依次排列时,由于地面存在不平整,可能会导致相邻的两个光伏面板之间存在高度差以及角度差,使得相邻的光伏面板的表面无法保证位于同一平面上。
4、光伏面板安装在户外,因而面板的表面易堆积灰尘或其他附着物,导致光伏面板的发电效率降低。通常光伏面板的表面需要定期清洁,为降低人工清洁成本,提高清洁效率,光伏电站多采用清洁机器人清扫面板的表面。
5、清洁机器人利用滚刷清洁光伏面板的表面时,滚刷需要保持被压设至光伏面板的状态,但是当清洁机器人跨越相邻且不共面的光伏面板时,车体需要进行爬坡以及下坡,使得被压低的滚刷易与倾斜的光伏面板发生干涉,导致清洁机器人无法平稳地在光伏面板上行进,降低了清洁效果。
技术实现思路
1、本技术提供一种光伏清洁机器人以及清洁系统,以解决清洁机器人跨越相邻且不共面的光伏面板时,使得被压低的滚刷易与倾斜的光伏面板发生干涉,导致清洁机器人无法平稳地在光伏面板上行进,降低清洁效果的技术问题。
2、本技术提供一种光伏清洁机器人,能够沿光伏面板行进,所述光伏清洁机器人包括车体、清洁壳体、滚刷以及转动装置,定义所述车体沿长度方向的侧边为长侧,其沿宽度方向的侧边为宽侧;清洁壳体连接至所述车体的长侧;滚刷可转动式连接至所述清洁壳体,所述滚刷的长度适配于至少一个所述光伏面板的长度;所述清洁壳体通过至少一个所述转动装置连接至所述车体,以控制所述滚刷升降。
3、可选的,所述转动装置包括第一支撑臂、伸缩臂、第二支撑臂以及联动板,第一支撑臂包括相对的第一端以及第二端,所述第一端连接至一所述长侧,所述第二端朝向另一所述长侧伸出;伸缩臂包括固定端以及伸出端,所述固定端铰接至所述第一支撑臂的第二端,所述伸出端朝向所述清洁壳体延伸;第二支撑臂包括相对的第三端以及第四端,所述第三端连接至一所述长侧,使得所述第一支撑臂与所述第二支撑臂分别连接至所述车体的两侧,所述第四端朝向所述清洁壳体延伸;联动板包括第五端、第六端以及第七端,所述第五端与所述第七端相对设置,所述第六端突出于所述联动板的底端,并位于所述第五端与所述第七端之间;所述第五端铰接至所述伸出端,所述第六端铰接至所述第四端,所述第七端固定连接至所述清洁壳体;其中,所述伸出端被拉出时,所述伸出端推动所述第五端靠近所述清洁壳体,使得所述第七端能够围绕所述第六端向下转动,以下压所述滚刷;所述伸出端被收缩时,所述伸出端拉动所述第五端远离所述清洁壳体,使得所述第七端能够围绕所述第六端向上转动,以抬升所述滚刷。
4、可选的,所述清洁壳体包括清洁框架、两个清洁侧板以及加强板,清洁框架通过至少一个所述转动装置连接至所述长侧;两个清洁侧板分别连接至所述清洁框架的两端部;加强板连接至所述清洁框架的中部,所述加强板通过加强杆铰接至所述长侧;其中,每一所述滚刷包括第一刷体以及第二刷体,所述第一刷体的中心轴线与所述第二刷体的中心轴线重合;所述第一刷体通过第一清洁电机可转动式设于一所述清洁侧板与所述加强板之间,所述第二刷体通过第二清洁电机可转动式设于另一所述清洁侧板与所述加强板之间。
5、可选的,所述第一刷体包括第一边缘刷毛,所述第一边缘刷毛设于所述第一刷体靠近所述清洁侧板的端部;所述第二刷体包括第二边缘刷毛,所述第二边缘刷毛设于所述第二刷体靠近所述清洁侧板的端部。
6、可选的,光伏清洁机器人还包括控制设备、第一检测单元以及第二检测单元,控制设备连接至所述车体,所述控制设备包括控制器;第一检测单元设于所述清洁壳体的一端部或所述车体的一端部,所述第一检测单元电连接至所述控制器,用以检测所述滚刷的该端部是否在所述光伏面板上;第二检测单元设于所述清洁壳体的另一端部或所述车体的另一端部,所述第二检测单元电连接至所述控制器,用以检测所述滚刷的该端部是否在所述光伏面板上;其中,当所述滚刷的两端部均位于所述光伏面板上时,两所述宽侧的前进速度相同;当所述滚刷中仅一端部位于所述光伏面板上时,该端部对应所述宽侧的前进速度小于另一所述宽侧的前进速度。
7、可选的,光伏清洁机器人还包括控制设备、第一检测单元以及第二检测单元,控制设备连接至所述车体,所述控制设备包括控制器;第一检测单元设于所述清洁壳体的一端部或所述车体的一端部,所述第一检测单元电连接至所述控制器,用以检测所述滚刷的该端部是否在所述光伏面板上;第二检测单元设于所述清洁壳体的另一端部或所述车体的另一端部,所述第二检测单元电连接至所述控制器,用以检测所述滚刷的该端部是否在所述光伏面板上;其中,当所述滚刷的两端部均位于所述光伏面板的外侧时,所述控制器控制所述转动装置抬升所述滚刷。
8、可选的,所述车体的两侧对称式设置有所述滚刷,定义车体的前进方向为前方;所述车体行进时,获取前侧的所述滚刷上的所述第一检测单元的数据与所述第二检测单元的数据。
9、可选的,光伏清洁机器人还包括控制壳体、控制器以及至少一个电池单元,控制壳体连接至所述车体,所述控制壳体包括一可开合的密封盖;控制器设于所述控制壳体内;至少一个电池单元设于所述控制壳体内,并电连接至所述控制器。
10、可选的,光伏清洁机器人还包括至少一个太阳能面板以及电源管理单元,至少一个太阳能面板设于所述车体的顶面,并沿所述长侧的方向排列;所述太阳能面板电连接至所述控制器;电源管理单元设于所述控制壳体内,并电连接至所述控制器,以控制所述太阳能面板产生稳定电流;定义所述光伏面板上侧边框对应的所述宽侧为第一宽侧,所述光伏面板下侧边框对应的所述宽侧为第二宽侧;所述控制壳体靠近所述第二宽侧设置,所述太阳能面板由所述车体的中部延伸至靠近所述第一宽侧处。
11、可选的,所述车体包括车架主体、两个车架侧板、两个第一固定条、两个第二固定条以及至少一个支撑框架,两个车架侧板分别连接至所述车架主体的两侧端;两个第一固定条连接至所述车架主体的两侧,且所述第一固定条的两端分别连接至两所述车架侧板;两个第二固定条分别对应至两所述第一固定条的下侧,且所述第二固定条的两端分别连接至两所述车架侧板;至少一个支撑框架的上侧边角分别连接至两所述第一固定条,其下侧边角分别连接至两所述第二固定条,且所述支撑框架的顶端连接至所述车架主体。
12、可选的,光伏清洁机器人还包括两组驱动装置,两组驱动装置设于所述车体的底部,并分别连接至两所述宽侧;每一组所述驱动装置包括至少一个第一轮体、驱动电机、至少一个带轮以及传动带,至少一个第一轮体可转动式连接至所述车体的宽侧处,所述第一轮体的中心轴与所述车体的前进方向相垂直;驱动电机连接至一所述第一轮体;每一所述带轮连接至一所述第一轮体;传动带绕设至所述带轮的外侧,用于驱动所述第一轮体同步转动。
13、可选的,光伏清洁机器人还包括辅助行走装置,所述辅助行走装置包括轮架以及至少一个第二轮体,轮架连接至所述车体的底部的中心处;至少一个第二轮体可转动式连接至所述轮架,所述第二轮体的中心轴与所述车体的前进方向相垂直。
14、可选的,光伏清洁机器人还包括第一限位座、至少一个第一卡轮以及l形板,第一限位座连接至第一宽侧的下方,所述第一宽侧为所述光伏面板上侧边框对应的所述宽侧;所述第一限位座包括第一臂体以及第一板体,所述第一臂体的一端连接至所述车体的侧壁,其另一端垂直连接至所述第一板体的中部;至少一个第一卡轮可转动式连接至所述第一板体,所述第一卡轮的中心轴与所述车体的顶面相垂直,且所述第一卡轮的外侧壁能够抵接至所述光伏面板的上侧边框;l形板的顶端连接至所述第一板体,其底端延伸至所述车体下方。
15、可选的,光伏清洁机器人还包括第二限位座以及至少一个第二卡轮,第二限位座连接至第二宽侧的下方,所述第二宽侧为所述光伏面板下侧边框对应的所述宽侧;所述第二限位座包括第二臂体以及第二板体,所述第二臂体的一端连接至所述车体的侧壁,其另一端垂直连接至所述第二板体的端部,并且所述第二板体的另一端部背离所述车体方向延伸;至少一个第二卡轮可转动式连接至所述第二板体,所述第二卡轮的中心轴与所述车体的顶面相垂直,且所述第二卡轮的外侧壁能够抵接至所述光伏面板的下侧边框;其中,所述第二板体开设有至少一个安装槽,每一所述第二卡轮适配于一所述安装槽;每一所述安装槽包括通槽以及至少一个通孔,通槽沿所述长侧的方向开设于所述第二板体上;至少一个通孔沿所述长侧的方向等间距排布,所述通孔的横截面为半圆形,且连通至所述通槽;所述第二卡轮能够由所述通槽滑动至一所述通孔内,以调整所述第二卡轮与所述第二宽侧之间的垂直距离。
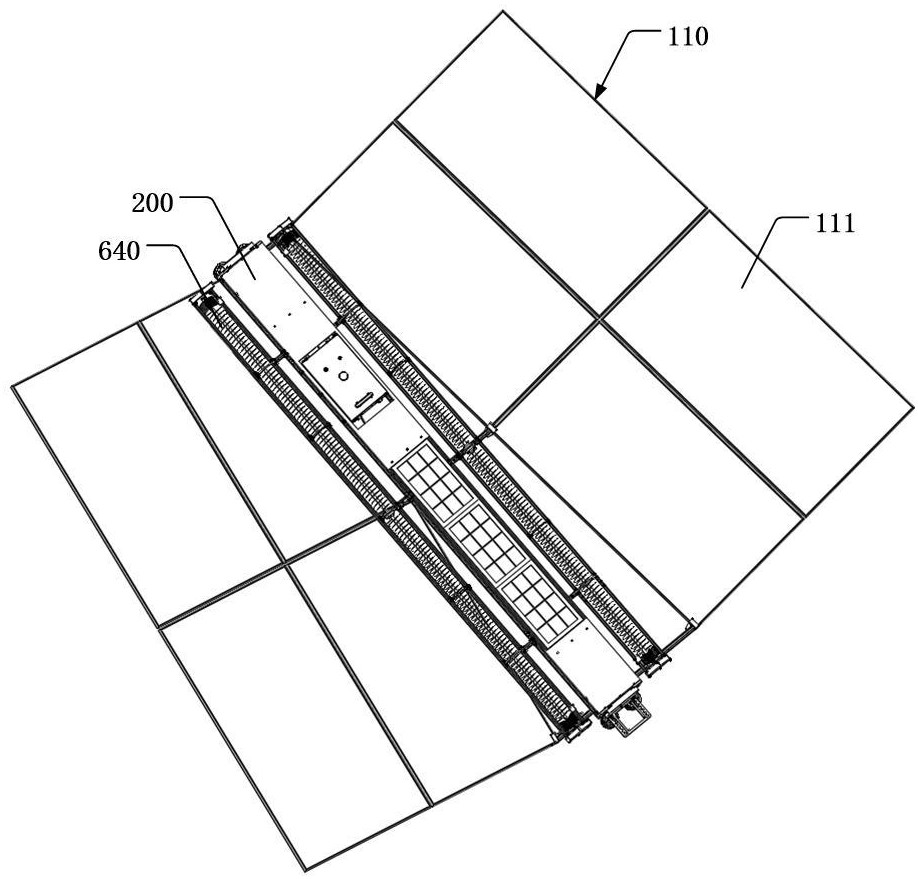
16、相应的,本技术还提供一种清洁系统,其包括光伏面板阵列、至少一个桥接装置以及光伏清洁机器人,光伏面板阵列由多个光伏面板沿长度方向与宽度方向排列组成;每一所述桥接装置设于相邻的两所述光伏面板之间,且包括至少三个桥接轨道,每一所述桥接轨道的两端分别连接至两所述光伏面板相对的边框上;所述光伏清洁机器人能够沿所述光伏面板以及所述桥接轨道行进,所述光伏清洁机器人为上述任一项所述的光伏清洁机器人。
17、可选的,所述光伏清洁机器人包括两组驱动装置以及至少一组辅助行走装置,所述辅助行走装置位于两所述驱动装置之间;所述驱动装置能够沿所述光伏面板阵列的上下侧边框以及两侧的所述桥接轨道行进,所述辅助行走装置能够沿所述光伏面板阵列的中部边框以及对应的所述桥接轨道行进;任一组所述驱动装置贴合至所述光伏面板阵列以及所述桥接装置,同时另一组所述驱动装置和/或至少一组所述辅助行走装置贴合至所述光伏面板阵列以及所述桥接装置。
18、可选的,所述光伏清洁机器人包括第一检测单元以及第二检测单元,所述第一检测单元与所述第二检测单元分别设于车体的两端部,用以检测滚刷是否位于所述光伏面板上;当所述滚刷的两端部均位于所述桥接轨道上时,所述滚刷被抬升;当所述滚刷的两端部均位于所述光伏面板阵列上时,所述车体两端部的前进速度相同;当所述滚刷的一端位于所述光伏面板阵列上,其另一端位于所述桥接轨道上,且所述滚刷处于被抬升的状态时,所述车体位于所述光伏面板阵列上的前进速度小于其位于所述桥接轨道上的前进速度。
19、可选的,所述第一检测单元包括光电传感器、距离传感器、超声波传感器中的至少一种;所述第二检测单元包括光电传感器、距离传感器、超声波传感器中的至少一种。
20、本技术提供一种光伏清洁机器人以及清洁系统,当光伏清洁机器人沿光伏面板阵列行进时,控制器控制转动装置下压滚刷,使得滚刷的刷毛可以充分地接触光伏面板,并可以增加滚刷与光伏面板之间的压力,从而提高滚刷的清洁效果。当光伏清洁机器人跨越不共面的光伏面板以及桥接装置时,由于光伏面板之间存在高度差以及角度差,控制器控制转动装置抬升滚刷,使得滚刷能够脱离光伏面板的表面,从而避免车体行进中滚刷与光伏面板发生干涉,从而便于车体在桥接装置上行进。
21、利用第一检测单元与第二检测单元采集的信号判断车体具体的行进状态,同时控制器可以根据行进状态控制车体的前进速度以及是否抬升滚刷,可以保光伏清洁机器人在行进过程中不会与光伏面板以及桥接装置发生干涉,以保证行进中的稳定性;同时可以控制车体在光伏面板阵列上的行进速度,使得车体的前进方向与光伏面板的宽度方向保持一致,使得车体可以在平稳运行的状态下完成对光伏面板各个位置的清洁,从而能够提高清洁质量以及清洁效率。
- 还没有人留言评论。精彩留言会获得点赞!