磁通切换型无轴承永磁记忆电机的位移速度并行控制方法
本发明涉及电力传动控制设备,特别是一种磁通切换型无轴承永磁记忆电机的位移速度并行控制方法。
背景技术:
1、随着工业领域对于电机的需求量越来越大,性能要求也越来越高。将记忆电机的概念运用到磁通切换型无轴承永磁电机设计中,是一种新型的无轴承永磁记忆电机。磁通切换型无轴承永磁记忆电机因其结构简单、实用性强等优点被广泛应用于储能电源、航空航天等领域。通过运用径向基函数神经网络萤火虫算法,可以使得磁通切换型无轴承永磁记忆电机在启动时能够快速平稳地达到给定转速和位移,超调量和稳态误差小,转矩脉动小、响应迅速,突加或者突减负载时,速度和位移变化量小且能快速回归平稳运行。
2、由于磁通切换型无轴承永磁记忆电机的复杂性,其精确数学模型通常很难获得,而传统的径向基神经网络方法对磁通切换型无轴承永磁记忆电机的数学模型精确性要求较高,并且在工况状态变化时,不能对转子位移速度做出实时快速反应,经检索国内外相关专利和文献,尚无针对磁通切换型无轴承永磁记忆电机位移速度并行控制的方法。
技术实现思路
1、本发明所要解决的技术问题是克服现有技术的不足而提供一种磁通切换型无轴承永磁记忆电机的位移速度并行控制方法,本发明采用径向基函数神经网络萤火虫算法代替传统径向基神经网络算法,其精度更高,稳定性更好,计算速度更快,结构参数依赖性更小,对于磁通切换型无轴承永磁记忆这样非线性特性比较突出的控制对象,可以明显看出径向基函数神经网络萤火虫算法的优势,通过解决全局最优解和高质量局部解,从而实现磁通切换型无轴承永磁记忆电机不同给定转速和位移的高精度控制。
2、本发明为解决上述技术问题采用以下技术方案:
3、根据本发明提出的一种磁通切换型无轴承永磁记忆电机的位移速度并行控制方法,
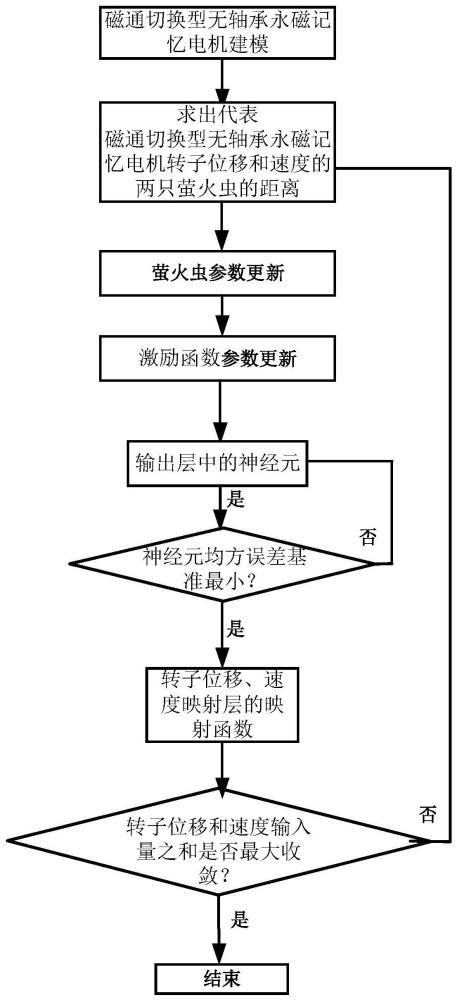
4、对磁通切换型无轴承永磁记忆电机建模,确定设计变量,设计变量包括磁通切换型无轴承永磁记忆电机转子位移和速度;
5、采用任意两只萤火虫xpi和xvj,xpi和xvj分别表示磁通切换型无轴承永磁记忆电机转子位移和速度的输入量;
6、将xpi和xvj之间的距离ri,j作为第i个激励函数φi(x);
7、径向基函数神经网络的输出层有j个神经元,隐藏层中的神经元通过设置位移、速度映射层加权因子wij、连接到输出层中任一神经元;将计算出的φi(x)传递至输出层中的第j个神经元yj;同时在径向基函数神经网络中加入第j个偏移参数βj、径向基函数神经网络输出第i个矢量函数o(xi);
8、在训练径向基函数神经网络时,求出第j个神经元的均方误差当作基准最小值、并结合o(xi)得出径向基函数神经网络的均方误差mse;
9、明确萤火虫算法的结构形式u,结合u组成隐含层的转子位移、速度映射层的映射函数f(tpi)和f(tvi);
10、找出代表磁通切换型无轴承永磁记忆电机转子位移和速度的输入量的任意两只萤火虫、使得f(tpi)与f(tvi)之和最大。
11、作为本发明所述的一种磁通切换型无轴承永磁记忆电机的位移速度并行控制方法进一步优化方案,位移速度并行控制方法具体如下:
12、对磁通切换型无轴承永磁记忆电机建模,确定影响转子位移和速度因素的设计变量,设计变量包括磁通切换型无轴承永磁记忆电机转子位移和速度;
13、采用任意两只萤火虫xpi和xvj,xpi和xvj分别表示磁通切换型无轴承永磁记忆电机转子位移和速度的输入量,xpi,k和xvj,k分别为xpi和xvj的第k个离散量,xpi和xvj之间的距离ri,j表示为下式:
14、
15、其中,k、c均为整数,c为离散量总数,n为数据样本点;
16、采用式(1)作为第i个激励函数φi(x);
17、φi(x)=-αi·||x-ci||2 (2)
18、其中,αi为第i个扩展函数,αi影响所训练神经元效率,ci为第i个神经元的中心坐标矢量,x为径向基函数神经网络各项权值,i=1,2,…,n;j=1,2,…,m;n为输入量维数,m为模糊分割数;
19、径向基函数神经网络输出层有j个神经元,隐藏层中的神经元通过设置位移、速度映射层加权因子wij,连接到输出层中任一神经元;将公式(2)的计算所得φi(x)传递至输出层中的第j个神经元yj;同时径向基函数神经网络中加入第j个偏移参数βj并输出第i个矢量函数o(xi);
20、
21、
22、其中,为第j个神经元的均方误差;
23、在训练径向基函数神经网络时,求出当作基准最小值得出径向基函数神经网络的均方误差mse;
24、
25、其中,t为迭代次数,tmax为最大迭代次数,α0为常数,d(xi)为第i个预期输出矢量;
26、径向基函数神经网络的性能取决于映射层的神经元数量影响,结合萤火虫算法来训练径向基函数神经网络前,需明确萤火虫算法的结构形式u;
27、u=(w1,w2,...,wn,α1,δ2,...,αn,c1,c2,...,cn,β1,β2,...,βm) (6)
28、其中,wi是第i个前件网络参数;
29、结合式(6),组成隐含层的转子位移、速度映射层的映射函数f(tpi)和f(tvi),分别表示为
30、
31、
32、其中,bpj和bvj分别为转子位移和速度高斯基函数的标准偏差;x为隐藏层输出矢量;cpi和cvi分别为f(tpi)和f(tvi)的中心矢量集;exp(·)为径向基函数指数形式;
33、找出代表磁通切换型无轴承永磁记忆电机转子位移和速度的输入量的任意两只萤火虫、使得f(tpi)与f(tvi)之和最大。
34、作为本发明所述的一种磁通切换型无轴承永磁记忆电机的位移速度并行控制方法进一步优化方案,数据样本点n是指构建磁通切换型无轴承永磁记忆电机的闭环控制系统来获取径向基函数神经网络萤火虫算法训练所需的样本。
35、作为本发明所述的一种磁通切换型无轴承永磁记忆电机的位移速度并行控制方法进一步优化方案,利用仿真软件完成磁通切换型无轴承永磁记忆电机的建模工作。
36、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
37、(1)径向基函数神经网络萤火虫算法相比传统的径向基神经网络和萤火虫算法,额外引入了速度子网络,利用了控制对象更多的输出信息,能够有效提升观测性能,具有更好的非线性逼近能力与自修正调节参数的机制能力;
38、(2)径向基函数神经网络萤火虫算法克服了传统径向基神经网络和萤火虫算法执行器损耗、系统不稳定和响应速度低的问题,结合参数更新机制,可以实时调整并行控制器的参数,实现高精度的转子位移控制。在具有强非线性的磁通切换型无轴承永磁记忆电机模型中,径向基函数神经网络萤火虫算法具有非线性趋近能力和数值稳定性更佳的优势,此方法可以优化完整的位移速度并行控制器参数更新策略,对提高电机的综合性能具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!