一种转子角度补偿方法、装置、电子设备及存储介质与流程
本技术属于电机控制,具体涉及一种转子角度补偿方法、装置、电子设备及存储介质。
背景技术:
1、当前,电机已被广泛应用于电动汽车、混合动力汽车以及其他需要电机作为动力装置的环境。其中,矢量控制作为电机的一种高性能控制方式而获得广泛应用。可以通过电机的转子位置来确定矢量控制参数。
2、相关技术中,可以通过电机位置传感器(motorpositionsensor,mps)分别离线采集出余弦信号和正弦信号的最大值和最小值,然后计算出正弦信号和余弦信号的幅度值和直流偏置值,并通过该幅度值和直流偏置值对正弦信号和余弦信号进行处理并通过反正切的方法计算出电机位置传感器获取的电机转子位置角度,进而使用此角度参与矢量控制系统的实施。
3、但是上述方法中,在电机的转动频率较高的情况下,容易引起电机位置传感器升温,电机位置传感器所输出的余弦信号和正弦信号也会出现较大误差,导致最终计算出的电机转子位置角度准确度较低。
技术实现思路
1、本技术旨在提供一种转子角度补偿方法、装置、车辆及存储介质,以解决现有技术中计算出的电机转子位置角度准确性较低的问题。
2、为了解决上述技术问题,本技术是这样实现的:
3、第一方面,本技术实施例提供了一种转子角度补偿方法,所述方法包括:
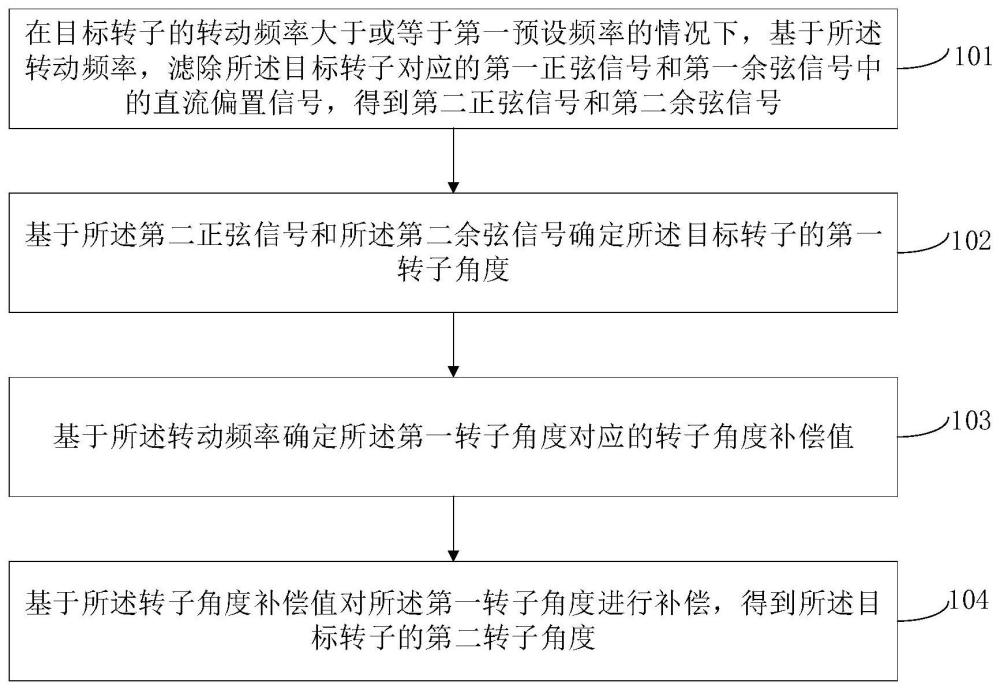
4、在目标转子的转动频率大于或等于第一预设频率的情况下,基于所述转动频率,滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号;
5、基于所述第二正弦信号和所述第二余弦信号确定所述目标转子的第一转子角度;
6、基于所述转动频率和所述转动频率对应的滤波截止频率确定所述第一转子角度对应的转子角度补偿值;
7、基于所述转子角度补偿值对所述第一转子角度进行补偿,得到所述目标转子的第二转子角度。
8、可选地,所述基于所述转动频率,滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号,包括:
9、确定所述转动频率对应的滤波频率区间;
10、基于所述滤波频率区间对应的高通滤波器滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号。
11、可选地,所述基于所述第二正弦信号和所述第二余弦信号确定所述目标转子的第一转子角度,包括:
12、基于上一计算周期的历史转子角度,采用帕克变换将所述第二正弦信号和所述第二余弦信号变换至正交坐标系,得到所述正交坐标系中的交轴对应的交轴正序分量;
13、基于所述上一计算周期的解耦分量对所述交轴正序分量进行解耦,得到所述交轴对应的交轴正序解耦分量;
14、基于所述交轴正序解耦分量,采用第一预设传递函数确定所述目标转子的第一转子角度。
15、可选地,所述基于所述交轴正序解耦分量,采用第一预设传递函数确定所述目标转子的第一转子角度,包括:
16、基于第一预设传递函数计算所述交轴正序解耦分量对应的第一角频率;
17、将所述第一角频率与所述目标转子的前馈角频率相加,得到所述目标转子的第二角频率;
18、基于第二预设传递函数和所述第二角频率,计算所述目标转子的第一转子角度。
19、可选地,所述基于所述第二正弦信号和所述第二余弦信号确定所述目标转子的第一转子角度,包括:
20、确定所述第二正弦信号和所述第二余弦信号之间的第一差值,以及所述第二正弦信号和所述第二余弦信号之间的第一和值;
21、确定所述第一差值和所述第一和值之间的比值对应的第一反正切值;
22、确定第一预设角度值与所述第一反正切值之间的差值,得到所述目标转子的第一转子角度。
23、可选地,所述基于所述转动频率,滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号,包括:
24、在所述转动频率大于第二预设频率,或所述转动频率由大于所述第二预设频率的第一频率区间减小至所述第一预设频率和所述第二预设频率构成的转动频率区间的情况下,基于所述转动频率,滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号。
25、可选地,所述方法还包括:
26、在所述转动频率小于所述第一预设频率,或所述转动频率由小于所述第一预设频率的第二频率区间增大至所述转动频率区间的情况下,基于所述第一正弦信号对应的第一幅度值和所述直流偏置信号对所述第一正弦信号进行归一化处理,得到第三正弦信号,基于所述第一余弦信号对应的第二幅度值和所述直流偏置信号对所述第一余弦信号进行归一化处理,得到第三余弦信号;
27、确定所述第三正弦信号和所述第三余弦信号之间的第二比值;
28、确定所述第二比值的第二反正切值,得到所述目标转子的第三转子角度。
29、第二方面,本技术实施例提供一种转子角度补偿装置,所述装置包括:
30、滤波模块,用于在目标转子的转动频率大于或等于第一预设频率的情况下,基于所述转动频率,滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号;
31、第一确定模块,用于基于所述第二正弦信号和所述第二余弦信号确定所述目标转子的第一转子角度;
32、第二确定模块,用于基于所述转动频率和所述转动频率对应的滤波截止频率确定所述第一转子角度对应的转子角度补偿值;
33、补偿模块,用于基于所述转子角度补偿值对所述第一转子角度进行补偿,得到所述目标转子的第二转子角度。
34、可选地,所述滤波模块,包括:
35、第一确定子模块,用于确定所述转动频率对应的滤波频率区间;
36、第一过滤子模块,用于基于所述滤波频率区间对应的高通滤波器滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号。
37、可选地,所述第一确定模块,包括:
38、坐标变换子模块,用于基于上一计算周期的历史转子角度,采用帕克变换将所述第二正弦信号和所述第二余弦信号变换至正交坐标系,得到所述正交坐标系中的交轴对应的交轴正序分量;
39、解耦子模块,用于基于所述上一计算周期的解耦分量对所述交轴正序分量进行解耦,得到所述交轴对应的交轴正序解耦分量;
40、第二确定子模块,用于基于所述交轴正序解耦分量,采用第一预设传递函数确定所述目标转子的第一转子角度。
41、可选地,所述第二确定子模块,包括:
42、第一计算单元,用于基于第一预设传递函数计算所述交轴正序解耦分量对应的第一角频率;
43、第二计算单元,用于将所述第一角频率与所述目标转子的前馈角频率相加,得到所述目标转子的第二角频率;
44、第三计算单元,用于基于第二预设传递函数和所述第二角频率,计算所述目标转子的第一转子角度。
45、可选地,所述第一确定模块,包括:
46、第三确定子模块,用于确定所述第二正弦信号和所述第二余弦信号之间的第一差值,以及所述第二正弦信号和所述第二余弦信号之间的第一和值;
47、第四确定子模块,用于确定所述第一差值和所述第一和值之间的比值对应的第一反正切值;
48、第五确定子模块,用于确定第一预设角度值与所述第一反正切值之间的差值,得到所述目标转子的第一转子角度。
49、可选地,所述滤波模块,包括:
50、第二过滤子模块,用于在所述转动频率大于第二预设频率,或所述转动频率由大于所述第二预设频率的第一频率区间减小至所述第一预设频率和所述第二预设频率构成的转动频率区间的情况下,基于所述转动频率,滤除所述目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号。
51、可选地,所述装置还包括:
52、归一化模块,用于在所述转动频率小于所述第一预设频率,或所述转动频率由小于所述第一预设频率的第二频率区间增大至所述转动频率区间的情况下,基于所述第一正弦信号对应的第一幅度值和所述直流偏置信号对所述第一正弦信号进行归一化处理,得到第三正弦信号,基于所述第一余弦信号对应的第二幅度值和所述直流偏置信号对所述第一余弦信号进行归一化处理,得到第三余弦信号;
53、第三确定模块,用于确定所述第三正弦信号和所述第三余弦信号之间的第二比值;
54、第四确定模块,用于确定所述第二比值的第二反正切值,得到所述目标转子的第三转子角度。
55、第三方面,本技术实施例提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现如上任意一项所述的转子角度补偿方法。
56、第四方面,本技术实施例提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令或者至少一段程序,所述至少一条指令或者所述至少一段程序由处理器加载并执行以实现上述任意一项所述的转子角度补偿方法。
57、本技术相比于现有技术,通过在目标转子的转动频率大于或等于第一预设频率的情况下,基于转动频率,滤除目标转子对应的第一正弦信号和第一余弦信号中的直流偏置信号,得到第二正弦信号和第二余弦信号,基于第二正弦信号和第二余弦信号确定目标转子的第一转子角度,基于转动频率确定第一转子角度对应的转子角度补偿值,基于转子角度补偿值对第一转子角度进行补偿,得到目标转子的第二转子角度,可以滤除第一正弦信号和第一余弦信号中的直流偏置信号,并通过滤波后得到的第二正弦信号和第二余弦信号确定目标转子的第一转子角度,通过转子角度补偿值对目标转子的第一转子角度进行补偿得到第二转子角度,规避了转动频率较高时幅值以及直流偏置值不精准的问题,并且通过对第一转子角度进行补偿,能够消除滤波引起的相位偏移,从而在一定程度上提升了转子角度的准确性。
58、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!