一种基于交通道路实时雷达探测的智慧路灯系统的制作方法
1.本发明属于交通道路灯技术领域,尤其用于智慧路灯,具体涉及一种基于交通道路实时雷达探测的智慧路灯系统。
背景技术:
2.智慧路灯是指通过应用先进、高效、可靠的电力线载波通信技术和无线gprs/cdma通信技术等,实现对路灯的远程集中控制与管理的路灯,智慧路灯具有根据车流量自动调节亮度、远程照明控制、故障主动报警、灯具线缆防盗、远程抄表等功能,能够大幅节省电力资源,提升公共照明管理水平,节省维护成本。
3.申请号为cn201910753749.6的专利,其内容为:本发明提出的一种基于交通道路实时雷达探测的智慧路灯系统,包括多个照明控制子系统,每一个照明控制子系统包括一个雷达和至少一个路灯;每一个路灯均设有对应的驱动控制器和通信模块;每一个雷达均设有对应的控制处理器;控制处理器用于在雷达检测到移动目标时,根据移动目标的移动速度计算雷达探测区域内位于移动目标前进路线上的一个或者多个路灯的照明时间段;驱动控制器用于获取控制处理器生成的对应路灯的照明时间段,并根据照明时间段控制路灯工作。本发明通过雷达实时探测移动目标出现在各照明区域的时间,从而控制各路灯在相应的时间内打开,实现需要照明时路灯打开,不需要照明时路灯关闭或者调暗,从而节约路灯电量。
4.上述专利虽然通过雷达检测移动目标实现对多个路灯的自动控制开关,来达到节约用电的效果,但控制方法较为复杂,无法根据车辆的移动实现路灯自身照明范围的调节,比如车辆即将驶离当前路灯照明范围,而后并没有其他车辆进入该照明范围时,整个照明路灯依旧整体照明,就形成了部分无车辆区域的浪费,且无法满足对车辆移动的照射范围,假如照明灯需要将整个范围内照亮,则所需电量过大,若电量小,则照明范围小,不能完全符合现有的智慧路灯。
技术实现要素:
5.针对上述背景产生的技术问题,本发明采用的技术方案如下:
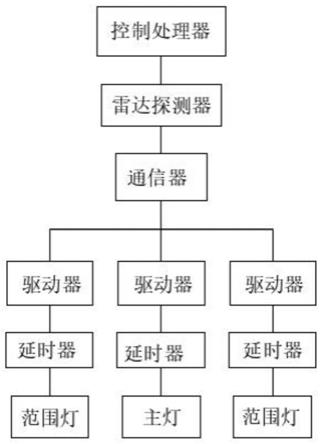
6.一种基于交通道路实时雷达探测的智慧路灯系统,包括若干照明灯柱,若干照明灯柱均匀间隔安装在道路两侧,每个照明灯柱上端安装有一个主灯和若干范围灯,若干范围灯倾斜安装在主灯左右两侧,若干范围灯用于增加照明范围;
7.每个照明灯柱上均安装有一个雷达探测器,雷达探测器用于对移动车辆进行实时测距和实时测速,每个雷达探测器设定的探测范围相互靠近;
8.主灯和每个范围灯均对应安装有驱动器,用以单独控制主灯的开关和每个范围灯的开关;
9.每个驱动器均连接至通信器上,用以传输控制处理器的控制命令,达到每个驱动器对主灯和每个范围灯开和关的控制;
10.通信器的控制命令由控制处理器发送,用以接受雷达探测器对移动车辆的实时测距和实时测速数据,经数据分析和处理后,发送对应控制命令给驱动器控制主灯和每个范围灯的开和关。
11.较佳的,上述每个雷达探测器设有一个探测范围圈,每个探测范围圈的边沿沿道路交互。
12.较佳的,所述主灯和每个范围灯上均安装有延时器,延时器用于对主灯和每个范围灯进行延时关闭,和驱动器连接。
13.较佳的,延时器对主灯和每个范围灯的延时时长至少为3s。
14.较佳的,若干所述范围灯至少为2个,2个所述范围灯对称安装在主灯两侧。
15.较佳的,若干所述范围灯的照明范围小于雷达探测器的探测范围。
16.较佳的,控制处理器依据雷达探测器对移动车辆的实时距离和实时测速的控制命令为:
17.a)雷达探测器探测范围内无移动车辆,控制处理器不发送控制命令,主灯和范围灯关闭;
18.b)雷达探测器探测范围内有移动车辆,根据移动车辆到第一个照明灯柱的实时到达距离d大于主灯照射范围,则控制处理器发送控制命令至驱动器,控制达到侧的范围灯开启,主灯开启;
19.c)雷达探测器探测范围内有移动车辆,根据移动车辆到第一个照明灯柱的实时到达距离d小于或等于主灯照射范围,则控制处理器发送控制命令至驱动器,控制达到侧的范围灯延时关闭,主灯开启,离开侧的范围灯开启;
20.d)雷达探测器探测范围内有移动车辆,根据移动车辆到第一个照明灯柱的实时离开距离d大于主灯照射范围,则控制处理器发送控制命令至驱动器,控制主灯延时关闭,离开侧的范围灯开启,直至下一个照明灯柱的雷达探测器探测到移动车辆,达到侧范围灯开启,依次进行上述操作。
21.采用本发明技术方案,获得以下有益效果:本发明结构简单,设置主灯和范围灯,直接通过雷达探测器探测移动车辆的实时距离和实时速度对主灯和范围灯进行控制,实现照明范围跟随车辆移动,既能保证对车辆行驶的照明范围,又能达到节约电能的作用。
附图说明
22.图1为本发明实施例的结构示意图;
23.图2为本发明实施例工作时的分布示意图。
具体实施方式
24.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
25.实施例1
26.如图1所示,一种基于交通道路实时雷达探测的智慧路灯系统,包括若干照明灯柱,若干照明灯柱均匀间隔安装在道路两侧,每个照明灯柱上端安装有一个主灯和若干范围灯,若干范围灯倾斜安装在主灯左右两侧,若干范围灯用于增加照明范围;
27.每个照明灯柱上均安装有一个雷达探测器,雷达探测器用于对移动车辆进行实时测距和实时测速,每个雷达探测器设定的探测范围相互靠近;
28.主灯和每个范围灯均对应安装有驱动器,用以单独控制主灯的开关和每个范围灯的开关;
29.每个驱动器均连接至通信器上,用以传输控制处理器的控制命令,达到每个驱动器对主灯和每个范围灯开和关的控制;
30.通信器的控制命令由控制处理器发送,用以接受雷达探测器对移动车辆的实时测距和实时测速数据,经数据分析和处理后,发送对应控制命令给驱动器控制主灯和每个范围灯的开和关。
31.上述每个雷达探测器设有一个探测范围圈,每个探测范围圈的边沿沿道路交互。
32.所述主灯和每个范围灯上均安装有延时器,延时器用于对主灯和每个范围灯进行延时关闭,和驱动器连接。
33.延时器对主灯和每个范围灯的延时时长至少为3s。
34.若干所述范围灯至少为2个,2个所述范围灯对称安装在主灯两侧。
35.若干所述范围灯的照明范围小于雷达探测器的探测范围。
36.参考图2,控制处理器依据雷达探测器对移动车辆的实时距离和实时测速的控制命令为:
37.a)雷达探测器探测范围内无移动车辆,控制处理器不发送控制命令,主灯和范围灯关闭;
38.b)雷达探测器探测范围内有移动车辆,根据移动车辆到第一个照明灯柱的实时到达距离d大于主灯照射范围,则控制处理器发送控制命令至驱动器,控制达到侧的范围灯开启,主灯开启;
39.c)雷达探测器探测范围内有移动车辆,根据移动车辆到第一个照明灯柱的实时到达距离d小于或等于主灯照射范围,则控制处理器发送控制命令至驱动器,控制达到侧的范围灯延时关闭,主灯开启,离开侧的范围灯开启;
40.d)雷达探测器探测范围内有移动车辆,根据移动车辆到第一个照明灯柱的实时离开距离d大于主灯照射范围,则控制处理器发送控制命令至驱动器,控制主灯延时关闭,离开侧的范围灯开启,直至下一个照明灯柱的雷达探测器探测到移动车辆,达到侧范围灯开启,依次进行上述操作。
41.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1