一种高精度Ka波段数字移相器
一种高精度ka波段数字移相器
技术领域
1.本发明属于集成电路领域,尤其涉及相控系统中的移相器设计,具体涉及一种高精度ka波段数字移相器。
背景技术:
2.相控阵系统广泛的应用于微波/毫米波通信和雷达等领域,它可以实现波束赋型和波束扫描,有效地增加通信雷达等系统发射信号的等效全向辐射功率,抑制接收信号的干扰减小信噪比,实现通信系统高速数据传输、雷达系统快速高精度成像。
3.移相器作为相控阵系统中的关键模块,很大程度上决定着相控阵系统的波束形成质量和转向能力。其中,移相器相位分辨率会影响相控阵的波束扫描分辨率,相位准确度影响波束指向角的准确性,相位准确度和插损变化都会影响相控阵系统的旁瓣抑制比。在移相器设计中,我们期待移相器具备高的相位分辨率、高的相位准确度、低的插损、低的插损变化、高的线性度和宽带特性。
4.针对5g毫米波通信应用,根据消耗功耗与否常用的移相器类型可分为无源移相器和有源移相器。无源移相器主要包括反射型移相器和开关型移相器。反射型移相器通常由模拟信号控制,移相范围受反射负载决定,在毫米波频段通常很难覆盖360度。开关型移相器通常由多个移相单元级联获得,每个单元通过开关控制获得不同的相移,其具有天然地数字控制特点,方便系统应用。但是,移相精度的提升要求其需要更多的单元级联,从而恶化了移相器的插损特性并增加了芯片面积。有源移相器通常采用矢量求和原理,将输入信号转换为正交信号,后通过可变增益放大器分别对正交的i路和q路信号进行放大,最终对i路和q路信号求和,根据iq两路信号幅度的不同,获得所需的相位。有源移相器通常可对信号提供一定的增益,但是也正因为如此,其线性度相比无源移相器较差。此外,由于移相器中晶体管增益的非线性,也导致移相精度的下降。
5.针对毫米波有源移相器面临的问题,本发明提出了一种基于矢量求和原理的ka波段高精度移相器结构,该结构中iq两路信号增益通过尾电流控制的方式,并通过设计非线性的数模转化控制结构提升移相器的相位精度。此外,本发明使用了发射极退化技术,进一步提升有源移相器的线性度。
技术实现要素:
6.本发明的目的是提出一种高精度ka波段数字移相器。从而能够提升有源移相器的线性度和移相精度。
7.为实现本发明的目的,本发明提供的技术方案如下:
8.一种高精度ka波段数字移相器,所述移相器的电路结构如下:信号输入后,经过巴伦t1转变为差分信号,随后差分信号分别经过3db耦合器并在耦合器的直通端和耦合端输出4路正交信号,通过电容c1-c4隔直后产生inin、inqn、inip和inqp分别进入i路和q路增益级,所述移相器i路和q路增益级结构相同,均包括增益控制晶体管m3、差分信号正负选择晶
体管m1-m2、放大晶体管q1-q4和发射机衰减电阻r5-r8,其中,差分信号inin和inip输入i路放大晶体管q1-q4的基极,同样差分信号inqn和inqp输入q路放大晶体管q1-q4的基极,偏置经串联电阻r9-r12为晶体管q1-q4进行偏置,r5-r8一端分别接q1-q4的发射极,实现发射极退化作用,电阻另一端分别接m1和m2的漏端,晶体管m1和m2栅极分别接开关晶体管m4和m5,通过控制字b7确定m1和m2偏置与否,实现i路差分信号相位的正负,m1和m2的源端接m3的漏端,m3的栅极连接数模转换器的输出,并通过数模转换器控制m3的漏端电流进而决定射频信号的增益,q1-q4的集电极交叉连接,分别于电感和电阻组成的负载连接,最后,信号经过电容c5-c6和巴伦t2组成的差分转单端网络进行输出。
9.其中,所述数模转换器的电路结构如下:参考电流通过m6-m9组成电流镜输出至m10和m11,m10与m11分别与6个单元组成电流镜,实现电流1倍至64倍的放大,控制字b1决定m15-m18导通与否,从而决定电流的流经路径,6个电流源的输出分别接晶体管m19和m20的漏端,m19和m21、m20和m22分别于移相器增益级组成电流镜,决定增益级的增益。
10.其中,所述晶体管m19和m20的漏极分别接6个电流翻转结构,每一个翻转结构可以由电阻控制实现不同的分流,控制字a1-a6由b1-b6经一定的逻辑电路产生,具体依据所需的电流决定。
11.与现有技术相比,本发明的有益效果为:
12.第一,该移相器增益级采用了发射级退化技术,提升了移相器的线性度;第二,移相器的增益控制采用了非线性数模转换器,可以补偿增益级的增益非线性,使得增益级增益随控制字线性增加,提升移相器的移相精度。
附图说明
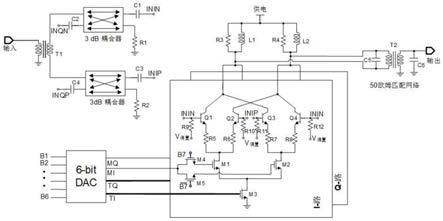
13.图1所示为本发明一种高精度ka波段数字移相器的电路结构图;
14.图2所示为增益补偿原理示意图;
15.图3所示为本发明非线性数模转换器电路结构示意图。
具体实施方式
16.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
17.以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
18.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用属于“包含”和/或“包括”时,其指明存在特征、步骤、操作、部件或者模块、组件和/或它们的组合。
19.应该理解,当本技术文件中称部件被“连接”到另一部件时,它可以直接连接到其他元件,或者也可以存在中间部件。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。
20.本发明实施例提供了一种高精度ka波段数字移相器,电路结构如图1所示。信号输入后,经过巴伦t1转变为差分信号,随后差分信号分别经过3db耦合器并在耦合器的直通端
和耦合端输出4路正交信号,通过电容c1-c4隔直后产生inin、inqn、inip和inqp,inin和inip进入i路可变增益级,inqn和inqp进入q路可变增益级。移相器可变增益级主要由增益控制晶体管m3、差分信号正负选择晶体管m1-m2、放大晶体管q1-q4和发射机衰减电阻r5-r8组成。差分信号inin和inip输入i路放大晶体管q1-q4的基极,同样差分信号inqn和inqp输入q路,偏置经串联电阻r9-r12为晶体管q1-q4进行偏置。r5-r8一端分别接q1-q4的发射极,实现发射极退化作用,电阻另一端分别接m1和m2的漏端。晶体管m1和m2栅极分别接开关晶体管m4和m5,通过控制字b7确定m1和m2偏置与否,实现i路差分信号相位的正负。m1和m2的源端接m3的漏端,m3的栅极连接数模转换器的输出,并通过数模转换器控制m3的漏端电流进而决定射频信号的增益。q1-q4的集电极交叉连接,分别于电感和电阻组成的负载连接。最后,信号经过电容c5-c6和巴伦t2组成的差分转单端网络进行输出。
21.需要说明的是,晶体管q1-q4可为信号提供增益,增益大小受尾电流管m3偏置控制,该偏置由6-bit数模转换器输出,并由控制字b1-b6控制。增益级输出信号的正负由m1和m2的导通情况决定,控制字b7可确定m1和m2的导通与否。为提升增益级的线性度而不恶化噪声系数,采用发射极退化技术,在晶体管q1-q4的发射级分别串联电阻r5-r8。可变增益级的增益随电流的变化趋势如图2(1)所示,实际情况下增益随电流增加为非线性的,为使得移相器相位变化线性、移相精度提升,增益级增益需随控制电流线性增加。为实现这一目标,本专利提出了具有电流补偿功能的非线性数模转换器,如图3所示。该数模转换器可以实现电流随控制字增加非线性变化,如图2(2)所示。传统的数模转化器电流一般随控制字线性变化,本专利在传统数模转换器基础上引进了电流翻转结构,使控制电流随控制字非线性增加,对增益级进行补偿使得增益随控制字线性增加,提高移相器的移相精度。
22.数字移相器中的数模转换器如图3所示,参考电流通过m6-m9组成电流镜输出至m10和m11,m10与m11分别与6个单元组成电流镜,实现电流1倍至64倍的放大。控制字b1决定m15-m18导通与否,从而决定电流的流经路径。6个电流源的输出分别接m19和m20的漏端,m19和m21、m20和m22分别于移相器增益级组成电流镜,决定增益级的增益。
23.为实现数模转换器的非线性,晶体管m19和m20的漏极分别接6个电流翻转结构,每一个翻转结构可以由电阻控制实现不同的分流,控制字a1-a6由b1-b6经一定的逻辑电路产生,具体依据所需的电流决定。
24.需要说明的是,本技术中未详述的技术方案,采用公知技术。
25.以上所述仅是本发明的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1