一种加工设备的制作方法
1.本实用新型涉及机械加工技术领域,尤其涉及一种加工设备。
背景技术:
2.当前,5g正引领万物互联趋势,未来5g通信将超越如今的智能终端、汽车电子两大应用市场,成为带动pcb产业增长的第一引擎。然而,5g也对pcb制作加工提出了更高、更严格的工艺要求。由于5g信号速率的提升,pcb板的加工偏差对信号性能的影响变大,这就要求pcb板的加工偏差管控更加严格。以5g通信板背钻工艺和5g天线模块成型加工为例,都对钻孔精度和外型尺寸精度控制提出了很高的要求。
3.现有pcb钻孔机采用的精度补偿方法是将钻孔机生产的产品拿到检验机上进行检测,从而根据检测结果来调整钻孔机的加工参数,对其进行手动补偿。这种对钻孔机进行手动补偿的方法浪费时间,补偿效率低,影响加工进度,人力成本大,还容易降低良品率。
技术实现要素:
4.基于以上问题,本实用新型的目的在于提供一种加工设备,补偿效率高,良品率高。
5.为达上述目的,本实用新型采用以下技术方案:
6.一种加工设备,包括床身、加工台和主轴模块,所述加工设备还包括精度补偿装置,所述精度补偿装置包括:
7.标定组件,包括设置于所述床身上的标定板,所述标定板上阵列设置有多个标记,所述加工台的台面坐标至少部分在所述标定板上具有对应的标定位置;
8.机器视觉系统,包括图像获取模块和图像处理模块,所述主轴模块移动至所述加工台的目标台面坐标处时,所述图像获取模块能够同步移动至与所述目标台面坐标相对应的标定位置处,所述图像获取模块用于拍摄与所述目标台面坐标相对应的标定位置的目标图像,所述图像处理模块用于判断所述目标图像中的目标标记的位置误差是否在预设误差范围内。
9.作为本实用新型的加工设备的优选方案,所述标定组件还包括安装支架,所述安装支架设置于所述床身上,所述标定板设置于所述安装支架上,至少部分所述标定板位于所述机器视觉系统的上方。
10.作为本实用新型的加工设备的优选方案,所述安装支架能够调节所述标定板的高度至所述图像获取模块的预设拍摄高度,所述安装支架包括支撑板和支撑腿,所述标定板设置于所述支撑板上,所述支撑腿的一端与所述支撑板连接,另一端与所述床身连接,所述支撑板可升降调节地设于所述支撑腿上或者所述支撑腿的长度可调。
11.作为本实用新型的加工设备的优选方案,所述图像获取模块包括由下而上依次设置的相机、镜头和光源。
12.作为本实用新型的加工设备的优选方案,所述相机与所述主轴模块上下同轴设
置,所述相机位于所述主轴模块的上方;或者,所述相机与所述主轴模块错开设置。
13.作为本实用新型的加工设备的优选方案,所述加工台固定设置于所述床身上,所述主轴模块分别沿x轴方向、y轴方向和z轴方向可移动地设置于所述床身上。
14.作为本实用新型的加工设备的优选方案,所述加工设备还包括x轴运动模块、y轴运动模块和z轴运动模块,所述z轴运动模块用于驱动所述主轴模块沿所述z轴方向移动,所述x轴运动模块用于驱动所述主轴模块和所述z轴运动模块沿所述x轴方向移动,所述y轴运动模块用于驱动所述主轴模块、所述x轴运动模块和所述z轴运动模块沿所述y轴方向移动。
15.作为本实用新型的加工设备的优选方案,所述z轴运动模块包括第一滑座、第一驱动件和第一导向组件,所述主轴模块设置于所述第一滑座上,所述第一滑座沿所述z轴方向移动设置于所述第一导向组件上,所述第一驱动件用于驱动所述第一滑座在所述第一导向组件上往复移动。
16.作为本实用新型的加工设备的优选方案,所述x轴运动模块包括第二滑座、第二驱动件和第二导向组件,所述z轴运动模块设置于所述第二滑座上,所述第二滑座沿所述x轴方向移动设置于所述第二导向组件上,所述第二驱动件用于驱动所述第二滑座在所述第二导向组件上沿所述x轴方向移动。
17.作为本实用新型的加工设备的优选方案,所述y轴运动模块包括第三滑座、第三驱动件和第三导向组件,所述第三滑座沿所述y轴方向移动设置于所述第三导向组件上,所述第三导向组件设置于所述床身上,所述第三驱动件用于驱动所述第三滑座在所述第三导向组件上沿所述y轴方向移动。
18.作为本实用新型的加工设备的优选方案,所述y轴运动模块还包括第三安装板,所述x轴运动模块设置于所述第三滑座上,所述第三安装板的两端分别设置有所述第三滑座,两组所述第三导向组件分别设于所述加工台沿x轴方向的两侧,所述第三安装板通过所述第三滑座可滑动地配置于两组所述第三导向组件上。
19.作为本实用新型的加工设备的优选方案,所述加工设备为钻孔机、铣边机或钻锣一体机。
20.本实用新型的有益效果为:
21.本实用新型提供的加工设备,通过精度补偿装置对主轴模块的加工精度进行自动补偿,具体为,主轴模块移动至加工台的目标台面坐标处时,图像获取模块能够同步移动至与目标台面坐标相对应的标定位置处,由于标定板上阵列设置有多个标记,加工台的台面坐标至少部分在标定板上具有对应的标定位置,通过图像获取模块拍摄与目标台面坐标相对应的标定位置的目标图像,通过图像处理模块判断目标图像中的目标标记的位置误差是否在预设误差范围内,若是,则无需补偿,若不是,则进行对主轴模块进行自动补偿。本实用新型提供的加工设备,无需人工手动补偿操作,降低了人力成本,省时省力,补偿效率高,加快了加工进度,补偿效果好,提高了加工精度,提高了产品的良品率。
附图说明
22.为了更清楚地说明本实用新型实施例中的技术方案,下面将对本实用新型实施例描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根
据本实用新型实施例的内容和这些附图获得其他的附图。
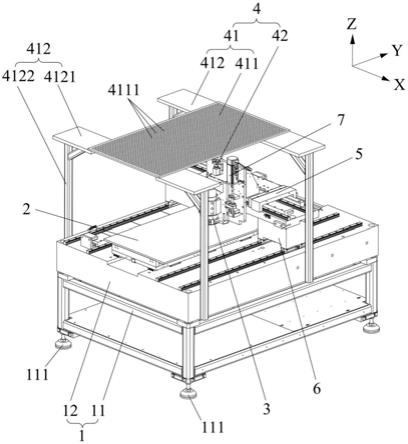
23.图1是本实用新型具体实施方式提供的加工设备的结构示意图;
24.图2是本实用新型具体实施方式提供的加工设备(隐藏精度补偿装置后)的结构示意图;
25.图3是本实用新型具体实施方式提供的加工设备(隐藏床身和精度补偿装置后)的结构示意图;
26.图4是本实用新型具体实施方式提供的加工设备中主轴模块、机器视觉系统和z轴运动模块的结构示意图。
27.图中:
28.1-床身;2-加工台;3-主轴模块;4-精度补偿装置;5-x轴运动模块;6-y轴运动模块;7-z轴运动模块;
29.11-机架;111-地脚;12-工作台;
30.41-标定组件;42-机器视觉系统;
31.411-标定板;4111-标记;412-安装支架;
32.4121-支撑板;4122-支撑腿;
33.421-相机;422-镜头;423-光源;
34.51-第二滑座;52-第二驱动件;53-第二导向组件;54-第二安装板;55-第二限位开关;
35.61-第三滑座;62-第三驱动件;63-第三导向组件;64-第三限位开关;65-第三安装板;
36.71-第一滑座;72-第一驱动件;73-第一限位开关;74-第一安装板;
37.721-旋转电机;722-丝杆;723-螺母座。
具体实施方式
38.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本实用新型实施例的技术方案作进一步的详细描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、仅用于描述目的,而不能理解为指示或暗示相对重要性。其中,术语“第一位置”和“第二位置”为两个不同的位置。
40.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新
型中的具体含义。
41.如图1至图4所示,本实施例提供一种加工设备,该加工设备包括床身1、加工台2、主轴模块3和精度补偿装置4,加工台2用于放置待加工板材,主轴模块3用于夹持刀具对待加工板材进行加工,精度补偿装置4用于补偿主轴模块3的加工精度。
42.具体地,精度补偿装置4包括标定组件41和机器视觉系统42,标定组件41包括设置于床身1上的标定板411,标定板411位于机器视觉系统42的上方,标定板411可以采用点阵式标定板,标定板411上阵列设置有多个标记4111(标定孔或标定点),加工台2的台面坐标至少部分在标定板411上具有对应的标定位置。机器视觉系统42包括图像获取模块和图像处理模块,图像获取模块能够与主轴模块3同步移动,主轴模块3移动至加工台2的目标台面坐标处时,图像获取模块能够同步移动至与目标台面坐标相对应的标定位置处。图像获取模块用于拍摄与目标台面坐标相对应的标定位置的目标图像,图像处理模块用于判断目标图像中的目标标记的位置误差是否在预设误差范围内。或者,标定板411还可以采用棋盘格式标定板。
43.在补偿加工精度时,通过图像获取模块拍摄与目标台面坐标相对应的标定位置的目标图像,目标图像内至少包括两个目标标记,通过图像处理模块判断目标图像中的至少两个目标标记的位置误差是否在预设误差范围内,即判断目标图像中的目标标记的实际坐标与理论坐标之间的误差是否在预设误差范围内,若是,则无需补偿,若不是,则进行对主轴模块3进行自动补偿。具体地,图像处理模块根据目标图像中像素分布和亮度、颜色等信息,转变成数字化信号,再对这些信号进行各种运算来抽取目标标记的特征信息,进而输出所需结果。
44.如图4所示,图像获取模块可以包括由下而上依次设置的相机421、镜头422和光源423,相机421设置于镜头422的一端,光源423设置于镜头422的另一端。相机421、镜头422和光源423同轴设置,相机421与主轴模块3可以上下同轴设置,即主轴模块3的中心线与相机421中心线重合,相机421位于主轴模块3的正上方,相机421与主轴模块3也可以不同轴设置,即主轴模块3的中心线与相机421中心线按照预设位置关系错开。
45.相机421可以采用ccd(charge coupled device)或cmos(complementary metal oxide semiconductor)芯片工业相机,相比于传统的民用相机而言,它具有图像稳定、高传输能力和高抗干扰能力等优点。典型的ccd相机由光学镜头、时序及同步信号发生器、垂直驱动器、模拟/数字信号处理电路组成。ccd作为一种功能器件,与真空管相比,具有无灼伤、无滞后、低电压工作、低功耗等优点。cmos图像传感器将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上,还具有局部像素的编程随机访问的优点。目前,cmos图像传感器以其良好的集成性、低功耗、高速传输和宽动态范围等特点在高分辨率和高速场合得到了广泛的应用。
46.镜头422选配时需要选择与摄像机接口和ccd的尺寸相匹配的镜头422。镜头422的基本功能就是实现光束变换(调制),在机器视觉系统42中,镜头422的主要作用是将目标成像在图像传感器的光敏面上。光源423可以采用环形光源,环形光源提供不同照射角度、不同颜色组合,更能突出物体的三维信息;环形光源采用高密度led阵列,亮度高,解决对角照射阴影问题,可选配漫射板导光,光线均匀扩散。光源423也可以采用例如背光源、条形光源、同轴光源点光源等光源。
47.如图1所示,标定组件41还可以包括安装支架412,安装支架412设置于床身1上,标定板411设置于安装支架412上,至少部分标定板411位于机器视觉系统42的上方。床身1可以包括机架11和工作台12,机架11用于支撑工作台12,机架11的底部设置有四个地脚111,用于调平机架11和工作台12,使工作台12的台面处于水平。具体地,安装支架412固定连接于机架11上,标定板411能够全部覆盖加工台2的正上方,图像获取模块的相机421、镜头422和光源423由下而上依次设置,相机421对其上方的标定板411进行拍摄。优选地,标定板411可覆盖整个加工台2,加工台2上的每个坐标在标定板411上都有对应的标定位置,图像获取装置在标定位置处拍摄到的目标图像内包括至少两个标记4111。
48.安装支架412能够调节标定板411的高度至图像获取模块的预设拍摄高度,通过安装支架412调节标定板411的高度至图像获取模块的预设拍摄高度,使图像获取模块获取的目标图像足够清晰,以识别图像中的目标标记。安装支架412可以包括支撑板4121和支撑腿4122,标定板411设置于支撑板4121上,支撑腿4122的一端与支撑板4121连接,另一端与床身1连接。在本实施例中,安装支架412包括两个支撑板4121和四个支撑腿4122,两块支撑板4121间隔设置,标定板411的两个侧边分别固定连接于两个支撑板4121上,每个支撑板4121下方具有两个支撑腿4122,支撑腿4122可以包括滑动连接的第一杆和第二杆,第一杆套设于第二杆内,第一杆与支撑板4121固定连接,第二杆与机架11固定连接,第一杆相对第二杆滑动,以调节整个支撑腿4122的长度,达到所需预设长度时,通过螺钉将第一杆和第二杆固定住。当然,在其他实施例中,第一杆和第二杆也可以通过螺纹连接的方式,实现整个支撑腿4122的长度调节。或者,支撑板4121可升降调节的设置于支撑腿4122上,如支撑板4121上设置套筒以套设于支撑腿4122上,通过套筒上的紧固件卡紧支撑板4121和支撑腿4122。
49.可选地,加工台2固定设置于床身1上,主轴模块3分别沿x轴方向、y轴方向和z轴方向可移动地设置于床身1上。将加工台2和标定板411均固定住,使加工台2的台面坐标更方便与标定板411的标记4111的位置相对应,减少加工精度误差因素。x轴方向、y轴方向和z轴方向相互垂直,实现主轴模块3在空间位置的任意移动,以方便补偿加工精度。
50.加工设备还可以包括x轴运动模块5、y轴运动模块6和z轴运动模块7,z轴运动模块7用于驱动主轴模块3沿z轴方向移动,x轴运动模块5用于驱动主轴模块3和z轴运动模块7沿x轴方向移动,y轴运动模块6用于驱动主轴模块3、x轴运动模块5和z轴运动模块7沿y轴方向移动。采用复合运动形式设置x轴运动模块5、y轴运动模块6和z轴运动模块7的运动关系,能够简化整个加工设备的结构,减少占用体积,避免结构干涉。
51.如图1和图4所示,z轴运动模块7可以包括第一滑座71、第一驱动件72和第一导向组件(图未示),主轴模块3设置于第一滑座71上,第一滑座71沿z轴方向移动设置于第一导向组件上,第一驱动件72用于驱动第一滑座71在第一导向组件上往复移动。主轴模块3的主轴朝下,面向加工台2设置。z轴运动模块7还包括第一安装板74,主轴模块3和机器视觉系统42均设置在第一安装板74上,第一安装板74为板状结构,第一导向组件可以为设置在第一安装板74上的导轨,第一滑座71与导轨滑动连接,实现往复移动。第一滑座71的侧边设置有第一限位开关73的感应片,第一安装板74上设置有第一限位开关73的上下两个信号端。
52.第一驱动件72可以包括旋转电机721、丝杆722和螺母座723,旋转电机721的壳体固定连接在第一安装板74上,旋转电机721的输出端与丝杆722连接,丝杆722与螺母座723螺纹连接,螺母座723与第一滑座71固定连接,旋转电机721驱动丝杆722转动,转动丝杆722
可以带动螺母座723移动,螺母座723移动带动第一滑座71在第一安装板74的导轨上滑动。或者,第一驱动件72可以包括直线电机,直线电机的定子固定于第一安装板74上,第一滑座71连接于直线电机的动子。
53.如图2所示,x轴运动模块5可以包括第二滑座51、第二驱动件52和第二导向组件53,z轴运动模块7设置于第二滑座51上,第二滑座51沿x轴方向移动设置于第二导向组件53上,第二驱动件52用于驱动第二滑座51在第二导向组件53上沿x轴方向移动。
54.如图3所示,第二滑座51上固定连接有第二安装板54,第二安装板54与第一安装板74垂直连接,第二安装板54呈近似直角三角板状结构,第二安装板54的一个直角边与第二滑座51固定连接,另一个直角边与第二安装板54固定连接。
55.x轴运动模块5还包括第二限位开关55,第二限位开关55用于对第二滑座51的滑动位置进行限位,第二限位开关55可以采用接触式,也可以采用非接触式。
56.y轴运动模块6可以包括第三滑座61、第三驱动件62和第三导向组件63,第三滑座61沿y轴方向移动设置于第三导向组件63上,第三导向组件63设置于床身1上,第三驱动件62用于驱动第三滑座61在第三导向组件63上沿y轴方向移动。
57.y轴运动模块6还包括第三安装板65,x轴运动模块5设置于第三安装板65上,第二导向组件53可以为设置在第三安装板65上的导轨,第三滑座61间隔设置有两个,分布于第三安装板65的底部两端,第三导向组件63可以为设置在工作台12上的导轨。若干个第三导向组件63分别设为两组,两组第三导向组件63分别设于加工台2沿x轴方向的两侧,第三安装板65通过第三滑座61可滑动地配置于两组第三导向组件63上。为了确保第三滑座61运动的平稳性,每组第三导向组件63均包括至少两个隔开设置的第三导向组件63,其中一组或两组第三导向组件63的至少两个第三导向组件63之间设有第三驱动件62。第三安装板65与第三滑座61可形成龙门架式结构,使得第三安装板65及其上部安装的x轴运动模块5在沿y轴方向运动时能够跨过加工台2。工作台12上设置有第三限位开关64,用于对第三滑座61的滑动位置进行限位,第三限位开关64可以采用接触式限位开关,也可以采用非接触式限位开关。除了电限位外,x轴运动模块5、y轴运动模块6和z轴运动模块7分别还包括机械限位结构,进一步防止电机类设备损坏。第二驱动件52和第三驱动件62可以为直线电机,x轴运动模块5和y轴运动模块6分别还包括光栅尺,以精确控制直线电机的位移精度。或者,第二驱动件52和第三驱动件62可以为丝杆进给机构。
58.本实施例提供的加工设备,在补充加工精度时,大致原理如下:将待加工板材放置于加工台2上,根据加工程序将主轴模块3通过x轴运动模块5、y轴运动模块6和z轴运动模块7移动至加工台2的目标台面坐标处,通过相机421拍摄与目标台面坐标相对应的标定板411上目标标记的目标图像,通过图像处理模块判断目标图像中的目标标记是否在预设误差范围内,若是,则无需补偿,若不是,则通过x轴运动模块5和y轴运动模块6调整主轴模块3的加工位置进行自动补偿,主轴模块3自动补偿的距离可以参照目标图像中目标标记与图像中心的距离而定,直至目标图像中的目标标记在预设误差范围内。
59.本实施例提供的加工设备可以为用于pcb加工的钻孔机、铣边机或钻锣一体机。
60.注意,上述仅为本实用新型的较佳实施例及所运用技术原理。本领域技术人员会理解,本实用新型不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本
实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1