前照灯系统和车辆的制作方法
本发明涉及前照灯系统,尤其是涉及一种前照灯系统和车辆。
背景技术:
1、驾驶员的视野好坏是决定我们能否安全驾驶的前提条件,夜间交通安全事故是最主要的交通安全事故。据统计,50%以上的交通安全事故发生在夜晚环境下,夜间交通安全事故很大一部分来自于不正确使用远光灯。当汽车在晚上行驶,大灯未能从远光灯转变成近光灯,这将严重影响其他车辆的行驶,这也是许多夜间车祸的重要原因。所以汽车的生产商会把照明设计放在优先考虑的因素之一。
2、当驾驶者开启远光灯来照明前方,会造成道路使用者眼部不适。在夜间行车模式下,当车的前轮只小角度转动时,车身的方向还未产生变化,车灯的照射范围还在正前方,所以容易出现左右盲区。另外山区道路、隧道等复杂路面状况,加之天气及光照亮暗变化等多种原因造成的汽车追尾的情况也增加对智能车灯系统全天候使用的要求。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出了一种前照灯系统,采用多光谱成像模块,适应多种环境工况,并基于各自内建参数模型,可准确标记定位特征目标,前照灯系统自动避开前方车辆行人,使对方不炫目。
2、本发明还提出了一种车辆。
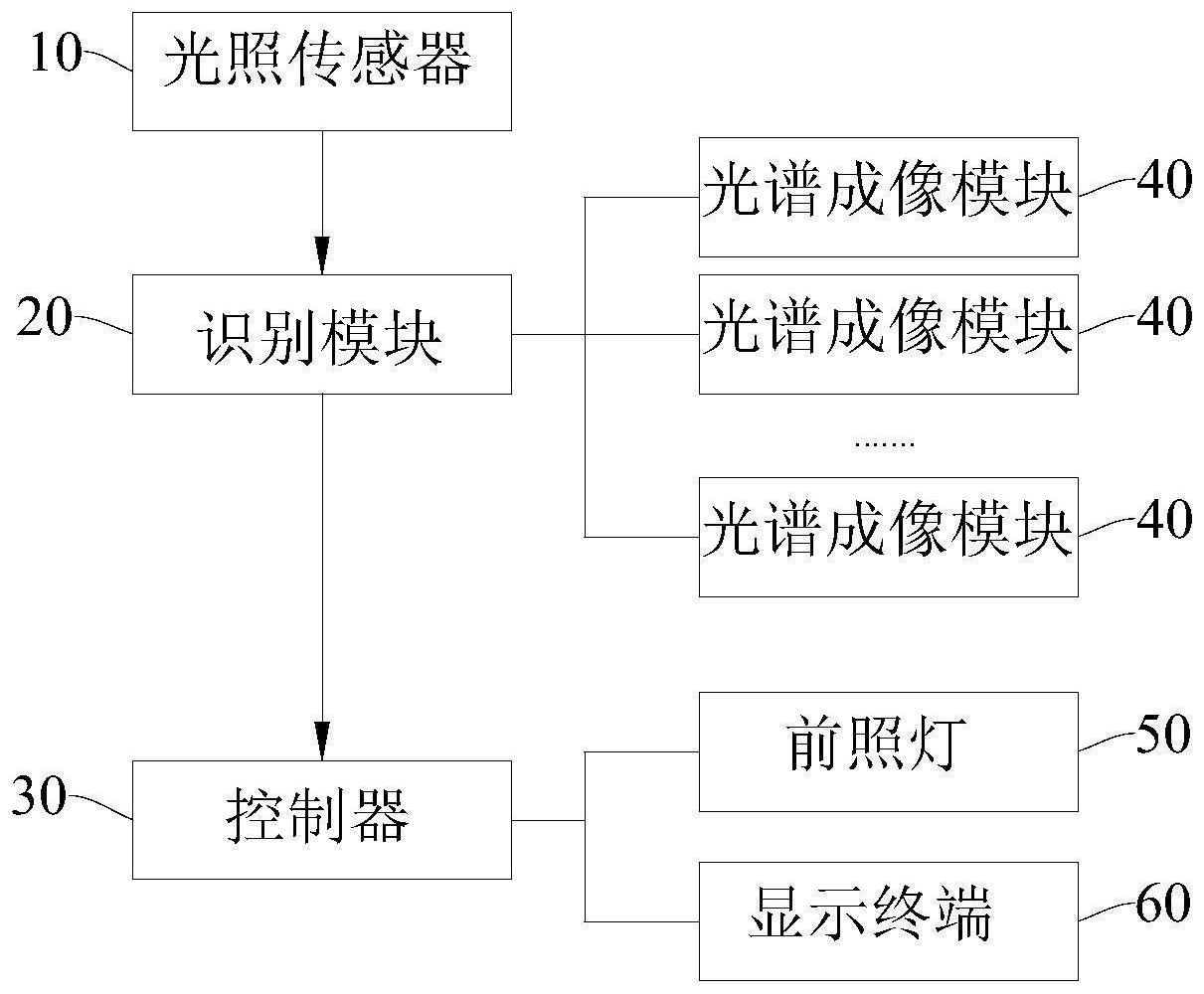
3、根据本发明第一方面实施例的前照灯系统,包括:光照传感器、识别模块、控制器、至少两个光谱成像模块和前照灯,所述控制器与所述光照传感器、所述识别模块、至少两个所述光谱成像模块和所述前照灯电连接;所述控制器被配置成:根据所述光照传感器传递的环境光亮度l选择不同的所述光谱成像模块;所述识别模块根据调用的所述光谱成像模块,选取对应的光谱内外参模型,根据所述光谱内外参模型识别特征目标并获取坐标位置数据;所述识别模块将获取的坐标位置数据映射到前照灯;控制器接收所述识别模块映射的坐标位置数据,控制驱动前照灯,使在车前方自适应照明。
4、根据本发明实施例的前照灯系统,光谱成像模块将视频图像传输给识别模块,识别模块结合光照传感器信号判断环境光的亮暗以及光谱成像模块的成像情况自主选择判断导入哪一光谱成像模块的视频影像。并且,识别模块基于所选用的光谱成像模块构建的内外参模型,可以准确定位特征目标的位置,并基于所定位位置映射到前照灯对应的地址位置,传递给控制器,控制器根据特征目标映射的地址位置控制前照灯区域的启闭亮暗。
5、根据本发明的一些实施例,所述光谱成像模块为两个,两个所述光谱成像模块分别为近红外成像模块和远红外成像模块。
6、根据本发明的一些实施例,所述控制器被配置成:所述环境光亮度l不大于预设的环境光亮度l0时,所述识别模块调用所述远红外成像模块;所述环境光亮度l大于预设的环境光亮度l0时,所述识别模块调用所述近红外成像模块。
7、根据本发明的一些实施例,所述近红外成像模块包括:近红外摄像头和红外补光灯,所述控制器被配置成:调用所述近红外成像模块时,所述红外补光灯启动,以给所述红外摄像头补光。
8、根据本发明的一些实施例,所述光谱成像模块为三个,三个所述光谱成像模块分别为可见光成像模块、激光雷达模块、毫米波雷达模块。
9、根据本发明的一些实施例,所述控制器被配置成:所述环境光亮度l不大于预设的环境光亮度l0时,所述识别模块调用所述激光雷达模块;所述环境光亮度l大于预设的环境光亮度l0时,所述识别模块调用所述可见光成像模块。
10、根据本发明的一些实施例,所述控制器还被配置成:所述识别模块根据调用的所述激光雷达模块和所述可见光成像模块,选取对应的光谱内外参模型,根据所述光谱内外参模型识别特征目标;若特征目标识别清晰,所述识别模块将获取的坐标位置数据映射到前照灯;若特征目标识别不清晰,所述识别模块调用所述毫米波雷达模块,选取对应的光谱内外参模型,根据所述光谱内外参模型识别特征目标。
11、根据本发明的一些实施例,对于特征目标识别是否清晰,所述控制器的识别方式为图像灰度直方图分布形态、物体特征模式识别和神经网络大量学习图像数据中的一种或多种。
12、根据本发明的一些实施例,所述前照灯系统还包括:显示终端,所述显示终端设置于车内且和所述控制器电连接,所述控制器被配置成:所述控制器将车前视频影像传输给所述显示终端,以显示影像。
13、根据本发明的一些实施例,所述显示终端为仪表盘、中控屏和投射显示装置中的一种。
14、根据本发明的一些实施例,所述前照灯为矩阵前照灯。
15、根据本发明第二方面实施例车辆,包括:所述前照灯系统。
16、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种前照灯系统,其特征在于,包括:光照传感器(10)、识别模块(20)、控制器(30)、至少两个光谱成像模块(40)和前照灯(50),所述控制器(30)与所述光照传感器(10)、所述识别模块(20)、至少两个所述光谱成像模块(40)和所述前照灯(50)电连接;
2.根据权利要求1所述的前照灯系统,其特征在于,所述光谱成像模块(40)为两个,两个所述光谱成像模块(40)分别为近红外成像模块(41)和远红外成像模块(42)。
3.根据权利要求2所述的前照灯系统,其特征在于,所述控制器(30)被配置成:
4.根据权利要求2所述的前照灯系统,其特征在于,所述近红外成像模块(41)包括:近红外摄像头(411)和红外补光灯(412),所述控制器(30)被配置成:
5.根据权利要求1所述的前照灯系统,其特征在于,所述光谱成像模块(40)为三个,三个所述光谱成像模块(40)分别为可见光成像模块(43)、激光雷达模块(44)、毫米波雷达模块(45)。
6.根据权利要求5所述的前照灯系统,其特征在于,所述控制器(30)被配置成:
7.根据权利要求6所述的前照灯系统,其特征在于,所述控制器(30)还被配置成:
8.根据权利要求7所述的前照灯系统,其特征在于,对于特征目标识别是否清晰,所述控制器的识别方式为图像灰度直方图分布形态、物体特征模式识别和神经网络大量学习图像数据中的一种或多种。
9.根据权利要求1所述的前照灯系统,其特征在于,所述前照灯系统还包括:显示终端(60),所述显示终端(60)设置于车内且和所述控制器(30)电连接,所述控制器(30)被配置成:
10.根据权利要求9所述的前照灯系统,其特征在于,所述显示终端(60)为仪表盘、中控屏和投射显示装置中的一种。
11.根据权利要求1所述的前照灯系统,其特征在于,所述前照灯(50)为矩阵前照灯。
12.一种车辆,其特征在于,包括:权利要求1-11中任一项所述的前照灯系统。
技术总结
本发明公开了一种前照灯系统和车辆,前照灯系统包括:光照传感器、识别模块、控制器、至少两个光谱成像模块和前照灯,控制器与光照传感器、识别模块、至少两个光谱成像模块和前照灯电连接;控制器被配置成:根据光照传感器传递的环境光亮度L选择不同的光谱成像模块;识别模块根据调用的光谱成像模块,选取对应的光谱内外参模型,根据光谱内外参模型识别特征目标并获取坐标位置数据;识别模块将获取的坐标位置数据映射到前照灯;控制器接收识别模块映射的坐标位置数据,控制驱动前照灯,使在车前方自适应照明。由此,采用多光谱成像模块,适应多种环境工况,并基于各自内建参数模型,可准确标记定位特征目标,前照灯系统自动避开前方车辆行人。
技术研发人员:郑茂铃,邱欣周,薛选然
受保护的技术使用者:西安比亚迪半导体有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!