一种智能自动化集成控制设备
1.本实用新型涉及自动化技术领域,尤其涉及一种智能自动化集成控制设备。
背景技术:
2.随着现代工业的发展,现在的生产都逐渐转变为了自动化,自动化所带来的好处自然是显而易见的,自动化可以有效的提高生产效率,但是因为初期的自动化控制设备是分开设置的,这样在启动和关闭时就比较麻烦,因此人们发明了一种智能自动化集成控制设备,从而可以更加便捷的对设备进行控制,但是常规的智能自动化集成控制设备避震效果不佳,因此会导致控制设备会因为震动而导致内部零件的失灵,从而需要进行停机维修,进而浪费了工作时间,降低了工作效率,同时常规的智能自动化集成控制设备,因为装置是放置在外壳内的,因此在对其进行检修的时候,工作人员需要将身体伸进外壳内,这样工作人员的生命安全就存在了隐患。
技术实现要素:
3.本实用新型提供一种智能自动化集成控制设备,解决了常规的智能自动化集成控制设备避震效果不佳,因此会导致控制设备会因为震动而导致内部零件的失灵,从而需要进行停机维修,进而浪费了工作时间,降低了工作效率,以及常规的智能自动化集成控制设备,因为装置是放置在外壳内的,因此在对其进行检修的时候,工作人员需要将身体伸进外壳内,这样工作人员的生命安全就存在了隐患的技术问题。
4.为解决上述技术问题,本实用新型提供的一种智能自动化集成控制设备,包括避震外壳、支撑块和底座,所述避震外壳上固定连接有伺服电机,所述伺服电机的输出轴上固定连接有第一转动轴,所述第一转动轴上固定连接有齿轮,所述齿轮啮合连接在轮齿板上,所述轮齿板固定连接在内壳上,所述内壳内放置有控制器,且内壳上开设有第一滑轨,所述第一滑轨上滑动连接有第一滑块,所述第一滑块上固定连接有伸缩杆和避震弹簧,所述伸缩杆和避震弹簧的另一端均固定连接在避震外壳内,所述内壳上端固定连接有第二滑块,所述第二滑块滑动连接在第二滑轨上,所述避震外壳上固定连接有第二转动轴,所述第二转动轴上转动连接有柜门,所述柜门上固定连接有延长滑轨,且柜门上固定连接有支撑块,所述避震外壳下端固定连接有底座。
5.优选的,所述齿轮对称分布在第一转动轴的左右两端,所述轮齿板与齿轮一一对应,且轮齿板的长度与避震外壳的长度相等。
6.优选的,所述第一滑轨分别对称分布在内壳的左右两端和上下两端,所述第一滑块与第一滑轨一一对应。
7.优选的,所述伸缩杆分别对称分布在第一滑块的左右两端和前后两端,所述避震弹簧分别对称分布在第一滑块的左右两端和前后两端。
8.优选的,所述第二滑块分别对称分布在内壳的左右两端和前后两端,所述第二滑轨与第二滑块一一对应,且第二滑轨的长度与避震外壳内部空间的长度相等。
9.优选的,所述延长滑轨放平状态的顶端面和第二滑轨的顶端面处于同一水平面,且延长滑轨的长度小于柜门的长度,所述底座对称分布在避震外壳的前后两端和左右两端。
10.与相关技术相比较,本实用新型提供的一种智能自动化集成控制设备具有如下有益效果:
11.本实用新型提供智能自动化集成控制设备,通过避震外壳以及避震弹簧,首先外壳为避震材料所制造的,这样可以吸附掉大部分因为震动产生的力,一些较小的力会被直接吸附掉,而那些没有被吸附掉的力则会通过避震弹簧将剩余的力抵消掉,从而解决了常规的智能自动化集成控制设备避震效果不佳,因此会导致控制设备会因为震动而导致内部零件的失灵,从而需要进行停机维修,进而浪费了工作时间,降低了工作效率的问题。
12.本实用新型提供智能自动化集成控制设备,采用齿轮以及轮齿板,通过伺服电机的转动使齿轮转动,而因为齿轮被固定住,因此当齿块转动时会带动其啮合连接的轮齿板朝前运动,而轮齿板的运动会使内壳运动,进而可以将控制器推送到避震外壳外面,从而方便工作人员对其进行检修,解决了常规的智能自动化集成控制设备,因为装置是放置在外壳内的,因此在对其进行检修的时候,工作人员需要将身体伸进外壳内,这样工作人员的生命安全就存在了隐患的问题。
附图说明
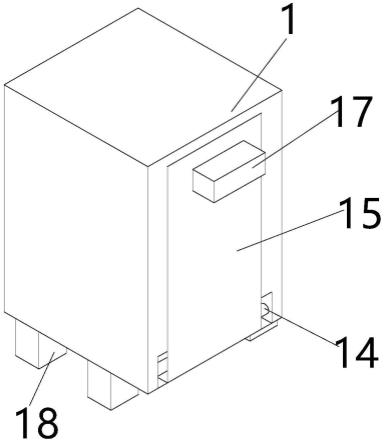
13.图1为本实用新型主视立体结构示意图;
14.图2为本实用新型主视剖面结构示意图;
15.图3为本实用新型图2中a处放大结构示意图;
16.图4为本实用新型轮齿板俯视剖面结构示意图;
17.图5为本实用新型第一转动轴侧视剖面结构示意图;
18.图6为本实用新型柜门主视结构示意图;
19.图中标号:1、避震外壳;2、伺服电机;3、第一转动轴;4、齿轮;5、轮齿板;6、内壳;7、控制器;8、第一滑轨;9、第一滑块;10、伸缩杆;11、避震弹簧;12、第二滑块;13、第二滑轨;14、第二转动轴;15、柜门;16、延长滑轨;17、支撑块;18、底座。
具体实施方式
20.实施例一,由图1-6给出,本实用新型,包括避震外壳1、支撑块17和底座18,避震外壳1上固定连接有伺服电机2,伺服电机2的输出轴上固定连接有第一转动轴3,第一转动轴3上固定连接有齿轮4,齿轮4啮合连接在轮齿板5上,轮齿板5固定连接在内壳6上,内壳6内放置有控制器7,且内壳6上开设有第一滑轨8,第一滑轨8上滑动连接有第一滑块9,第一滑块9上固定连接有伸缩杆10和避震弹簧11,伸缩杆10和避震弹簧11的另一端均固定连接在避震外壳1内,内壳6上端固定连接有第二滑块12,第二滑块12滑动连接在第二滑轨13上,避震外壳1上固定连接有第二转动轴14,第二转动轴14上转动连接有柜门15,柜门15上固定连接有延长滑轨16,且柜门15上固定连接有支撑块17,避震外壳1下端固定连接有底座18。
21.实施例二,在实施例一的基础上,齿轮4对称分布在第一转动轴3的左右两端,轮齿板5与齿轮4一一对应,且轮齿板5的长度与避震外壳1的长度相等,对称分布的齿轮4可以对
轮齿板5进行稳定的做功,从而使内壳6可以稳定的移动,进而提高了装置的稳定性,减少了控制器7的因为震动而损坏的可能性。
22.第一滑轨8分别对称分布在内壳6的左右两端和上下两端,第一滑块9与第一滑轨8一一对应,对称分布的第一滑轨8使其在运动的时候,可以保证稳定性,从而提高了装置的稳定性。
23.伸缩杆10分别对称分布在第一滑块9的左右两端和前后两端,避震弹簧11分别对称分布在第一滑块9的左右两端和前后两端,对称分布的伸缩杆10和避震弹簧11使的装置的避震效果提升,增强了装置的避震性,从而提高了装置的安全性。
24.第二滑块12分别对称分布在内壳6的左右两端和前后两端,第二滑轨13与第二滑块12一一对应,且第二滑轨13的长度与避震外壳1内部空间的长度相等,使内壳6在移动的过程中可以更加稳定,同时也给内壳6提供力较长的移动距离,进而提高了装置的稳定性。
25.延长滑轨16放平状态的顶端面和第二滑轨13的顶端面处于同一水平面,且延长滑轨16的长度小于柜门15的长度,底座18对称分布在避震外壳1的前后两端和左右两端,使内壳6可以从第二滑轨13平稳的移动到延长滑轨16上,提高了装置运行时的流畅性。
26.第一创新点实施步骤:
27.第一步:当一种智能自动化集成控制设备开始工作时,结合图1-图6,当维修人员需要对装置进行检修的时候,首先工作人员通过支撑块17将柜门15拉开,随后将柜门15平稳的放置在地面上,并使柜门15上的延长滑轨16与第二滑轨13齐平,随后维修人员启动伺服电机2,随着伺服电机2的启动,固定连接在伺服电机2输出轴上的第一转动轴3开始随着伺服电机2的转动而转动;
28.第二步:之后固定连接在第一转动轴3上的齿轮4转动,而齿轮4的转动则推动了轮齿板5朝前移动,随着轮齿板5的移动,使内壳6开始移动,而内壳6在移动的时候会带动第一滑轨8移动,从而使第一滑块9在第一滑轨8上移动,进而使第一滑块9留着原地;
29.第三步:而在第一滑轨8移动的同时,第二滑块12也开始在第二滑轨13上移动,并且会移动到延长滑轨16上,随着内壳6的移动,当其到达合适位置时,维修人员只需要关闭伺服电机2便可以使其停止,从而开始进行维修,当维修人员维修完毕后,反向启动伺服电机2,使齿轮4反转,将内壳6推送进避震外壳1内,随后关闭柜门15便完成了维修任务。
30.第二创新点实施步骤:
31.第一步:当一种智能自动化集成控制设备开始工作时,结合图1-图6,当装置受到外力的时候,一些较小的力会直接被使用避震材料做成的避震外壳1吸附掉,而如果遇到较大的力的时候,首先这个力会被避震外壳1吸附掉一部分;
32.第二步:随后这个力会使内壳6晃动,而在晃动的时候,内壳6会挤压避震弹簧11以及伸缩杆10,使避震弹簧11以及伸缩杆10收缩,从而对力进行抵消,当力抵消后内壳6回到原位,同时避震弹簧11以及伸缩杆10也会恢复原来的形状,从而完成了避震效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1