一种自动操作锁定件的装置的制作方法
本技术涉及锁定,具体涉及一种自动操作锁定件的装置。
背景技术:
1、电能表或者其它电子设备,需要使用线路板。
2、为了对线路板进行操作,需要将线路板通过锁定件锁定在载具上,例如线路板在过锡炉锡焊前,或者需要在线路板上安装电子元件前。
3、目前,主要是人工手动操作锁定件来使锁定件锁定线路板或者使锁定件与线路板分离,这样效率较低。
4、因此,可以继续改进。
技术实现思路
1、本实用新型所要解决的技术问题是针对现有技术的现状,提供一种操作效率较高的自动操作锁定件的装置。
2、本实用新型解决上述技术问题所采用的技术方案为:一种自动操作锁定件的装置,包括
3、基座,用于搁置载具和锁定件,载具具有向上开口的容纳腔,该容纳腔用于容纳线路板;锁定件以能转动地方式设置在载具的上表面;
4、其特征在于:还包括
5、机械手,设置在基座上且与锁定件可拆卸连接且能带动锁定件来回转动,从而使锁定件相对线路板具有至少两个状态:
6、在第一状态下,锁定件向下压住线路板;
7、在第二状态下,锁定件与线路板脱开。
8、机械手可以有多种结构,优选地,所述机械手包括
9、转盘,能在周向上来回转动;
10、夹爪,具有至少两个,且沿转盘的径向方向间隔设置,其中至少一个夹爪能径向相对另一个活动而能使两个夹爪相互靠近或远离;
11、当两个夹爪相互靠近,而夹紧锁定件;
12、当两个夹爪相互远离,而松开锁定件。
13、锁定件的结构可以有多种,优选地,为了减少锁定件在周向转动过程中对线路板的磨损,所述锁定件包括用于向下压住线路板或与线路板脱开的扣体,扣体的中部具有上下贯穿的穿孔,该穿孔的内壁径向向内延伸而形成台阶部,该穿孔内设置有与穿孔的孔壁间隙配合的螺栓,该螺栓的底端与载具固定,螺栓的头部与台阶部之间设置有弹性件,该弹性件具有向下作用于扣体的趋势。如此,解锁时,先向上提拉扣体而使扣体向上与线路板分离,再周向转动扣体至解锁状态如此线路板不容易磨损。
14、为了自动化运输载具和在需要的位置使载具停下,还包括
15、传送机构,设置在基座和载具之间,该传送机构用于载具搁置在其上而带动载具向前移动;
16、限位机构,设置在基座且与传送机构间隔设置,该限位机构相对载具具有至少两个状态:
17、在第三状态下,所述限位机构至少局部位于载具的前进路径上并与载具在前后方向上相抵;
18、在第四状态下,所述限位机构退出载具的前进路径。
19、通过设置传送机构,而便于自动化运输载具;通过设置限位机构,当限位机构的至少局部位于载具的前进路径时,载具被限位,而可以进行转动锁定件的操作。
20、传送机构有多种结构,优选地,所述传送机构包括能相对基座活动的传动带或传送链轮。
21、限位机构有多种结构,优选地,所述限位机构包括
22、第一气缸,设置在基座上,且与传送机构间隔设置;
23、限位杆,与第一气缸的输出端相连而能上下移动;
24、限位杆向上移动而处于第三状态下,限位杆位于载具的前进路径上并与载具在前后方向上相抵;
25、限位杆向上移动而处于第四状态下,限位杆退出载具的前进路径。通过限位杆的上下活动而实现对载具的是否限位。
26、为了在需要锁定和解锁时,减少载具在前进后退方向上的移动,还包括设置在基座上的作用机构,该作用机构用于向上带动载具而使载具向上与所述传送机构分离。如此,载具向上与传送机构分离,而不受传送机构的作用,载具不容易移动位置,机械手操作锁定件的效果较好。
27、为了使载具与限位杆分离的同时使载具不容易变形,所述作用机构包括
28、第二气缸,设置在基座上,且与传送机构间隔设置;
29、顶杆,与第二气缸的输出端相连而能上下移动;
30、在第五状态下,同时限位杆处于第三状态下,顶杆向上顶起载具而使载具与限位杆分离;
31、在第六状态下,顶杆向下移动而使载具随之落在传送机构上。
32、如此,第二气缸向上作用于载具而使载具与限位杆分离,这样载具不受传送机构作用而不容易晃动,便于对载具进行锁定或解锁操作;同时第二气缸向上作用于载具,载具没有受到挤压而不容易变形。
33、为了减少机械手的动作,所述机械手包括
34、转盘,能在周向上来回转动;
35、夹爪,具有至少两个,且沿转盘的径向方向间隔设置,其中至少一个夹爪能径向相对另一个活动而能使两个夹爪相互靠近或远离;
36、当两个夹爪相互靠近,而夹紧锁定件;
37、当两个夹爪相互远离,而松开锁定件;
38、在所述第五状态下,两个夹爪处于远离状态,锁定件位于两个夹爪之间;
39、在所述第六状态下,锁定件最高点的位置低于两个夹爪最低点的位置。
40、如此,第二气缸直接将载具移动到合适的位置而使锁定件处于合适的位置,这样机械手无需上下移动夹爪,而将夹爪对准锁定件,这样机械手可以减少上下移动夹爪的动作。
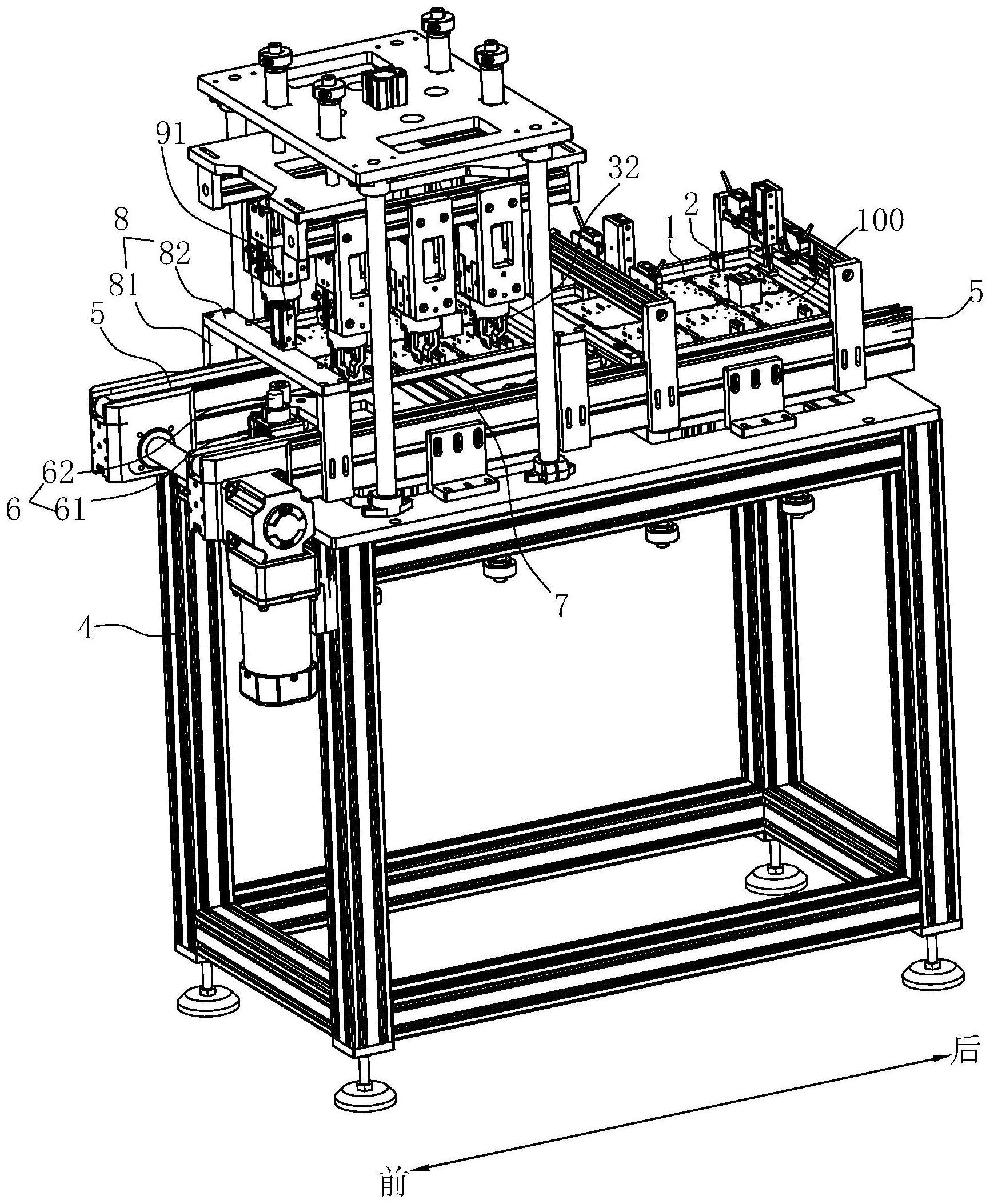
41、为了对载具在前进后退方向上进行限位,还包括设置在基座上的支架,该支架包括设置在基座上且位于载具的前进路径之外的竖向延伸段、与竖向延伸段的顶部相连的横向延伸段,该横向延伸段的位置高于所述限位机构和传送机构;
42、该横向延伸段的下方用于传送机构、载具、载具上的线路板通过;
43、所述横向延伸段的上部设置有能对处于第五状态的载具前后定位的定位机构。
44、通过定位机构的限位,载具不容易晃动,便于对载具进行锁定或解锁操作。
45、定位机构可以有多种结构,优选地,所述定位机构包括
46、第三气缸,设置在横向延伸段的上部,具有沿前后方向活动的输出端;
47、定位块,与第三气缸的输出端相连而能前后移动;
48、在第七状态下,定位块与载具的前进方向的侧壁相抵而夹住载具;
49、在第八状态,定位块与载具脱离。
50、为了对载具进行较为稳固地限位,所述定位机构具有两组,且分别位于载具前进方向的两侧,从而分别从前后两侧夹住载具。如此,定位机构与载具的接触面积较大,而限位效果较好。
51、与现有技术相比,本实用新型的优点在于:通过设置机械手,机械手能带动锁定件来回转动,从而使锁定件向下压住线路板或者使得锁定件与线路板脱开,这样完成了对线路板的锁定和解锁,操作效率较高;
52、另外,机械手与锁定件可拆卸连接,而不影响载具和锁定件的运输。
技术特征:
1.一种自动操作锁定件的装置,包括
2.根据权利要求1所述的装置,其特征在于:所述机械手(3)包括
3.根据权利要求1所述的装置,其特征在于:所述锁定件(2)包括用于向下压住线路板(100)或与线路板(100)脱开的扣体(21),扣体(21)的中部具有上下贯穿的穿孔,该穿孔的内壁径向向内延伸而形成台阶部(211),该穿孔内设置有与穿孔的孔壁间隙配合的螺栓(22),该螺栓(22)的底端与载具(1)固定,螺栓(22)的头部与台阶部(211)之间设置有弹性件(23),该弹性件(23)具有向下作用于扣体(21)的趋势。
4.根据权利要求1所述的装置,其特征在于:还包括
5.根据权利要求4所述的装置,其特征在于:所述传送机构(5)包括能相对基座(4)活动的传动带或传送链轮。
6.根据权利要求4所述的装置,其特征在于:所述限位机构(6)包括
7.根据权利要求4所述的装置,其特征在于:还包括设置在基座(4)上的作用机构(7),该作用机构(7)用于向上带动载具(1)而使载具(1)向上与所述传送机构(5)分离。
8.根据权利要求7所述的装置,其特征在于:所述作用机构(7)包括
9.根据权利要求8所述的装置,其特征在于:所述机械手(3)包括
10.根据权利要求8或9所述的装置,其特征在于:还包括设置在基座(4)上的支架(8),该支架(8)包括设置在基座(4)上且位于载具(1)的前进路径之外的竖向延伸段(81)、与竖向延伸段(81)的顶部相连的横向延伸段(82),该横向延伸段(82)的位置高于所述限位机构(6)和传送机构(5);
11.根据权利要求10所述的装置,其特征在于:所述定位机构(9)包括
12.根据权利要求11所述的装置,其特征在于:所述定位机构(9)具有两组,且分别位于载具(1)前进方向的两侧,从而分别从前后两侧夹住载具(1)。
技术总结
本技术涉及一种自动操作锁定件的装置,包括基座,用于搁置载具和锁定件,载具具有向上开口的容纳腔,该容纳腔用于容纳线路板;锁定件以能转动地方式设置在载具的上表面;还包括机械手,设置在基座上且与锁定件可拆卸连接且能带动锁定件来回转动,从而使锁定件相对线路板具有至少两个状态:在第一状态下,锁定件向下压住线路板;在第二状态下,锁定件与线路板脱开。通过设置机械手,机械手能带动锁定件来回转动,从而使锁定件向下压住线路板或者使得锁定件与线路板脱开,这样完成了对线路板的锁定和解锁;另外,机械手与锁定件可拆卸连接,而不影响载具和锁定件的运输。
技术研发人员:虞太军,王阳杨,单荣昌
受保护的技术使用者:宁波三星智能电气有限公司
技术研发日:20220831
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!