PCB自动机械钻孔工艺流程及其生产线的制作方法
本发明涉及pcb生产,特别涉及一种pcb自动机械钻孔工艺流程及其生产线。
背景技术:
1、在工业领域,“无人化”开始作为企业推动工厂智能化转型的一个重要方向。特别是当前企业面临招工难、原材料成本持续上涨以及个性化需求日益凸显的背景下,降低对人工的需求,提升生产线的柔性化和自动化生产能力,已经成为推动企业无人化、智能化、自动化发展的内在驱动力。
2、智能自动制造对于pcb而言,是一场全新启动的技术革命。在pcb生产制造领域,国内部分企业已经开始寻求生产工艺的自动化。但是在机械钻孔加工领域无明显建树。在现有的大尺寸pcb板生产工艺中,由于大尺寸pcb板,其中的机械钻孔加工技术流程还处在人工手动操作状态,生产效率较低。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种,能够pcb自动机械钻孔工艺流程,适用于大尺寸的pcb板生产,自动化的生产流程,过程中无人工操作,可提高生产效率。
2、本发明还提出一种应用上述pcb自动机械钻孔工艺流程的pcb自动机械钻孔生产线。
3、根据本发明的第一方面实施例的pcb自动机械钻孔工艺流程,所述pcb自动机械钻孔工艺流程包括以下加工步骤:
4、上pin操作,将产品搬运至上pin生产的产品入料口,在上pin工位中对产品进行上pin针操作;
5、装箱操作,完成上pin操作后,从上pin工位下料,在装箱工位中对产品进行装箱操作;
6、机械钻孔操作,将装箱后的产品搬运至机械钻孔的工位上进行机械钻孔加工生产;
7、拆箱操作,完成机械钻孔后,从机械钻孔的工位上下料,对装箱的产品进行拆箱操作;
8、退pin操作,完成拆箱操作后,将产品送入退pin生产的产品入料口,在退pin工位中对产品进行退pin针操作;以及
9、从退pin生产的产品出料口中退出成品并存放成品。
10、根据本发明实施例的pcb自动机械钻孔工艺流程,至少具有如下有益效果:将待钻孔的pcb产品搬运到上pin生产的产品入料口后,在上pin工位中先对产品进行上pin针操作,而后完成上pin操作后,从上pin工位下料,在装箱工位中再对产品进行装箱操作,接着将装箱后的产品搬运至机械钻孔的工位上进行机械钻孔加工生产;然后,完成机械钻孔后,从机械钻孔的工位上下料,对装箱的产品进行拆箱操作;完成拆箱操作后,将产品送入退pin生产的产品入料口,在退pin工位中对产品进行退pin针操作;最后,从退pin生产的产品出料口中退出成品并存放成品。至此完成整个大尺寸pcb机械钻孔的自动化操作,全程无人工操作,可减低人工成本的同时,还可提高生产的时效性。各个操作的操作工位之间依次连接,可实现大尺寸机械钻孔的高效自动化生产。
11、根据本发明的一些实施例,,将产品搬运至上pin生产的产品入料口包括:
12、利用agv搬运机器人从wip库位中将暂存的产品搬运至待上pin生产的产品入料口中,搬运时绑定物流信息并记录于系统中。
13、根据本发明的一些实施例,所述上pin针操作包括有:
14、ccd读码,读取产品上的二维码上传系统,待系统下发叠板上pin流程和配方;
15、ccd定位,按配方的资料进行资料识别,定位上pin的位置;
16、叠板,把单片的产品按系统设定的叠数进行叠板;
17、上pin针,产品完成叠板之后进行上pin针操作,并同步系统按叠数把二维码进行绑定;
18、垫板打孔,对机械钻孔用的垫板进行打孔操作;
19、上垫板,把已打孔的垫板按系统设定进行放置,放在已叠放的产品的下面,用pin针进行定位;
20、上铝片,把铝片放在已叠放的产品的上面;
21、包胶,分别对已叠放的产品进行长边包胶以及短边包胶,以固定产品的长边以及短边;
22、铝片打码,在完成包胶流程后的产品的铝片上进行激光刻二维码;
23、上pin出料,将已完成上pin生产的产品退至出料口。
24、根据本发明的一些实施例,所述装箱操作包括:
25、将智能立体库前的接驳口,与上pin出料直连;
26、ccd读码,读取铝片上的二维码并上传系统,待系统入库流程的库位分配和装箱流程的绑定;
27、入库,产品按系统分配的库位进入智能立体库;
28、排产出库,按系统设定的交期进行排产,并进行出库操作;
29、将智能立体库的接驳口,与“装箱”流程相连;
30、装箱,将叠板状态下的产品进行装箱。
31、根据本发明的一些实施例,所述机械钻孔操作包括:
32、利用agv搬运机器人从装箱中将产品搬运至机械钻孔前的待加工生产的产品暂存区中;
33、ccd读码,读取铝片上的二维码并上传系统,待系统调取机械钻孔流程资料和下方配方;
34、上板,机械钻孔前把产品放置在机械钻孔工位的生产平台上;
35、机械钻孔,按调取的机械钻孔流程资料和下发的配方要求进行机械钻孔加工生产;
36、下板,机械钻孔加工生产完成后,把产品从机械钻孔机的平台移出,并转运至产品暂存区中。
37、根据本发明的一些实施例,所述拆箱操作包括:
38、利用agv搬运机器人从产品暂存区中将产品搬运至智能立体库前的接驳口中,至智能立体库前的接驳口与拆箱工位相连;
39、拆箱,将装箱状态下的产品进行拆箱,产品转变为叠板的状态。
40、根据本发明的一些实施例,所述退pin操作前还包括:
41、ccd读码,读取铝片上的二维码并上传系统,待入库流程的库位分配;
42、产品按系统分配的库位进入智能立体库;
43、系统按设定交期进行排产,按照系统排产进行出库操作;
44、智能立体库的接驳口与退pin入料工位相连。
45、根据本发明的一些实施例,所述退pin操作包括:
46、产品从待退pin生产的产品入料口进入退pin工位;
47、ccd读码,读取铝片上的二维码并上传系统,待系统调取退pin针流程资料和下发配方;
48、割胶,把产品上用于固定长边以及短边的胶带做割断处理;
49、铝片下料,将铝片进行下料并进行堆垛,达到设定的堆垛高度或数量后由agv进行运输处理;
50、退pin针,按调取的退pin针流程资料和下发的配方将叠板上的pin针退出;
51、垫板下料,对产品下的垫板进行自动识别后,对垫板进行下料堆垛;
52、退pin出料,将已完成退pin生产的产品退至出料口。
53、根据本发明的一些实施例,所述垫板下料包括:
54、第一翻转,对产品进行翻面操作,产品由正面朝上转为反面朝上;
55、第一下料堆垛,对垫板进行自动识别,可再次利用的垫板在此流程进行下料堆垛,达到设定的堆垛高度或数量后由agv进行运输处理;
56、第二翻转,对产品进行翻面操作,产品由反面朝上转为正面朝上;
57、第二下料堆垛,对垫板进行自动识别,不可再次利用的垫板在此流程进行下料堆垛,达到设定的堆垛高度或数量后由agv进行运输处理。
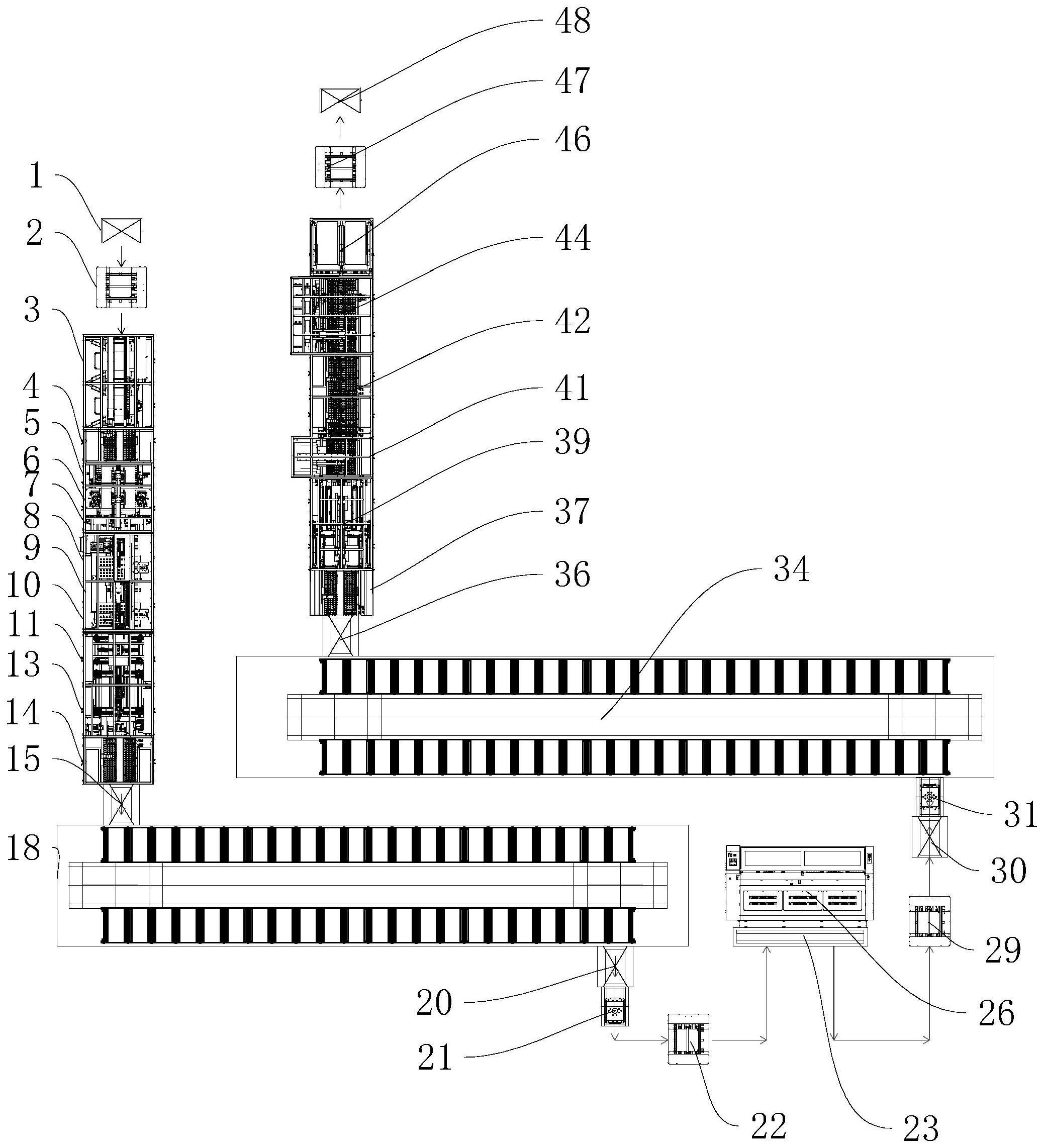
58、根据本发明的第二方面实施例的pcb自动机械钻孔生产线,应用于上述任意一项实施例所述的pcb自动机械钻孔工艺流程。
59、根据本发明实施例的pcb自动机械钻孔生产线,至少具有如下有益效果:pcb自动机械钻孔生产线由上述工艺流程中的操作工位组成,可形成一条完整的自动化生产线,适用于大尺寸pcb板的自动化机械钻孔生产工艺,生产线全程无人工操作,可减低人工成本的同时,还可提高生产的时效性。各个操作的操作工位之间依次连接,可实现大尺寸机械钻孔的高效自动化生产。
60、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!