自适应高精度芯片贴片装置及其贴片方法与流程
本发明涉及一种自适应高精度芯片贴片装置及其贴片方法。
背景技术:
1、smt贴片指的是在pcb基础上进行加工的系列工艺流程的简称,pcb为印刷电路板。smt是表面组装技术(表面贴装技术),是电子组装行业里最流行的一种技术和工艺。
2、目前的芯片贴片装置存在着精度不高、位置矫正不精确,以及不适用多个不同大小芯片来进行贴片的情况,一方面是因为其所配的视觉系统精度的问题,一方面是由于贴片头对芯片的抓取存在不稳定的情况。
3、如申请号为201810582133.2所公开的一种机器人视觉引导的芯片贴装方法及系统,其公开了“在pcb放置区域和芯片放置区域增设一第二工业相机,机器人吸取芯片移至该第二工业相机处,拍摄吸取后芯片的图像,比较芯片贴装区域与水平轴的夹角和吸取芯片后芯片与水平轴的夹角之间的角度差,使末端执行器在p3处旋转该角度差,进行角度补偿,并且在x和y轴上进行补偿,改善了在吸取芯片或者吸取后移动过程中产生的滑动误差,提高了贴装精度;同时,本发明采用六轴机器人,因六轴机器人具有更好的自由度和灵活性,实现了腔体类工件内部的芯片贴装,做到柔性生产;再加上第一工业相机设置在机器人手部,更易于运动,使得本发明这种基于位置的视觉控制方法具有更高的灵活性,适用范围更广”,其难以适配于不同尺寸的芯片在pcb板上进行高精度的贴片。
技术实现思路
1、针对现有技术中的不足,本发明的目的是提供一种能够适用于多个不同大小的芯片进行贴片,贴片精度高,抓取稳定,灵活度和智能化较高的自适应高精度芯片贴片装置及其贴片方法。
2、本发明解决其技术问题所采用的技术方案是:
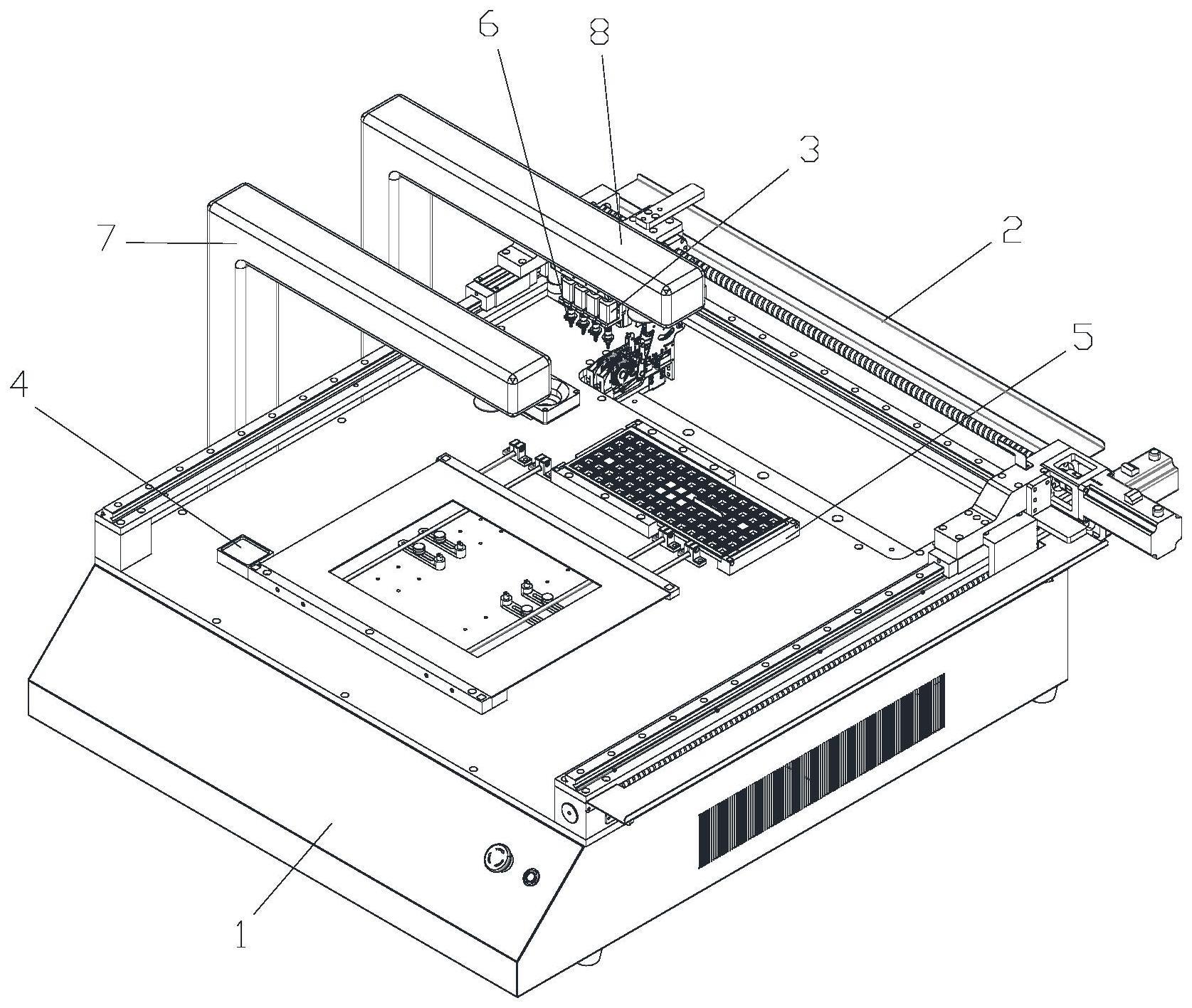
3、自适应高精度芯片贴片装置,包括有工作台,及安装于工作台外周位置的移动座,及安装于移动座上的贴片头,及安装于工作台中部位置的pcb夹持座,及安装于工作台上、并邻靠pcb夹持座的芯片放置座,该贴片头的吸嘴位置安装有电磁件,该工作台的一侧设置有可对pcb夹持座位置进行视觉识别的第一工业相机,及可对芯片放置座进行视觉识别的第二工业相机,该电磁件包括有卡装于贴片头吸嘴位置的空心软铁铁芯,及缠绕与空心软铁铁芯外的导电绕组。
4、作为优选,该移动座包括有安装于工作台两侧的x轴移动座,及安装于工作台一侧的、在x轴移动座上进行丝杠移动的y轴移动座,及安装于y轴移动座上的、在y轴移动座上进行丝杠移动的贴片座。
5、作为优选,该贴片头包括有安装于贴片座上的真空吸嘴,及安装于贴片座上的、驱动真空吸嘴进行上下移动的升降电机,及安装于升降电机上的、与真空吸嘴相接的用于提供吸力的气泵。
6、作为优选,该pcb夹持座包括有固定夹持边和移动夹持边,该固定夹持边的两顶角位置设置有固定二维码标识,该移动夹持边的两顶角位置设置有移动二维码标识,该固定夹持边与移动夹持边之间设置有可测量固定夹持边与移动夹持边间距的距离传感器,该芯片放置座的四顶角位置设置有芯片二维码标识。
7、本发明所要解决的另一技术问题为提供一种自适应高精度芯片贴片装置的贴片方法,包括以下步骤:
8、通过第一工业相机对pcb夹持座进行拍摄,获取pcb夹持座的俯视图像数据;
9、获取pcb夹持座的俯视图像数据中的两个固定二维码标识的像素坐标,以及两个移动二维码标识的像素坐标,实现像素坐标和世界坐标互转,得到第一工业相机的世界坐标;
10、通过pcb夹持座的俯视图像数据的像素坐标,进行平移转换得到pcb夹持座的实际坐标;
11、通过hsv空间查找的方式对pcb夹持座上的pcb板的芯片贴片位置和大小进行识别,得到芯片贴片位置的图像坐标(u1,v1),然后进行坐标变换,得到芯片贴片位置的世界坐标(x1,y1);
12、通过第二工业相机对芯片放置座进行拍摄,获取芯片放置座的俯视图像数据;
13、获取芯片放置座的俯视图像数据中的四个芯片二维码标识的像素坐标,实现像素坐标和世界坐标互转,得到第一工业相机的世界坐标;
14、通过图像的像素坐标,进行平移转换得到芯片放置座的实际坐标;
15、通过hsv空间查找的方式对芯片放置座上的各个芯片的位置和大小进行识别,得到各个芯片的位置的图像坐标(u2,v2),然后进行坐标变换,得到各个芯片的位置的世界坐标(x2,y2);
16、控制贴片头移动到芯片进行真空吸片作业,同时启动电磁件进行磁吸作业,移动贴片头吸起芯片至pcb板的芯片贴片位置进行贴片作业,同时放下芯片,即可,重复以上作业直至完成所有芯片的贴片作业,即可。
17、作为优选,获取pcb夹持座的俯视图像数据中的两个移动二维码标识的像素坐标的方法为:通过距离传感器发送的两个移动夹持边移动长度,得到移动二维码标识的像素坐标。
18、作为优选,获取第一工业相机的世界坐标的方法为:利用opencv的api,cv2.calibratecamera得到旋转平移向量,编制转换关系函数,实现像素坐标和世界坐标互转,并获取第一工业相机的世界坐标。
19、作为优选,获取第二工业相机的世界坐标的方法为:利用opencv的api,cv2.calibratecamera得到旋转平移向量,编制转换关系函数,实现像素坐标和世界坐标互转,并获取第二工业相机的世界坐标。
20、作为优选,采用公式相机位姿=旋转矩阵转置r*平移向量t,得到第一工业相机和第二工业相机的世界坐标。
21、作为优选,采用公式编制转换关系函数,进行像素坐标和世界坐标互转。
22、本发明的有益效果是:
23、通过采用第一工业相机与第二工业相机来进行pcb夹持座与芯片放置座的识别,从而通过机械视觉判断pcb板上的芯片贴片位置与大小与芯片的位置与大小,并根据识别的结果自动选择与芯片贴片位置大小相适配的芯片,然后通过真空吸头与磁吸相配合使芯片进行高稳定性和快速的拿取,并进行贴片作业,实现自适应不同大小芯片的高精度贴片作业。
技术特征:
1.自适应高精度芯片贴片装置,包括有工作台,及安装于工作台外周位置的移动座,及安装于移动座上的贴片头,及安装于工作台中部位置的pcb夹持座,及安装于工作台上、并邻靠pcb夹持座的芯片放置座,其特征在于:该贴片头的吸嘴位置安装有电磁件,该工作台的一侧设置有可对pcb夹持座位置进行视觉识别的第一工业相机,及可对芯片放置座进行视觉识别的第二工业相机,该电磁件包括有卡装于贴片头吸嘴位置的空心软铁铁芯,及缠绕与空心软铁铁芯外的导电绕组。
2.根据权利要求1所述的自适应高精度芯片贴片装置,其特征在于:该移动座包括有安装于工作台两侧的x轴移动座,及安装于工作台一侧的、在x轴移动座上进行丝杠移动的y轴移动座,及安装于y轴移动座上的、在y轴移动座上进行丝杠移动的贴片座。
3.根据权利要求2所述的自适应高精度芯片贴片装置,其特征在于:该贴片头包括有安装于贴片座上的真空吸嘴,及安装于贴片座上的、驱动真空吸嘴进行上下移动的升降电机,及安装于升降电机上的、与真空吸嘴相接的用于提供吸力的气泵。
4.根据权利要求1-3中任一项所述的自适应高精度芯片贴片装置,其特征在于:该pcb夹持座包括有固定夹持边和移动夹持边,该固定夹持边的两顶角位置设置有固定二维码标识,该移动夹持边的两顶角位置设置有移动二维码标识,该固定夹持边与移动夹持边之间设置有可测量固定夹持边与移动夹持边间距的距离传感器,该芯片放置座的四顶角位置设置有芯片二维码标识。
5.一种自适应高精度芯片贴片装置的贴片方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的自适应高精度芯片贴片装置的贴片方法,其特征在于,获取pcb夹持座的俯视图像数据中的两个移动二维码标识的像素坐标的方法为:通过距离传感器发送的两个移动夹持边移动长度,得到移动二维码标识的像素坐标。
7.根据权利要求5所述的自适应高精度芯片贴片装置的贴片方法,其特征在于,获取第一工业相机的世界坐标的方法为:利用opencv的api,cv2.calibratecamera得到旋转平移向量,编制转换关系函数,实现像素坐标和世界坐标互转,并获取第一工业相机的世界坐标。
8.根据权利要求7所述的自适应高精度芯片贴片装置的贴片方法,其特征在于,获取第二工业相机的世界坐标的方法为:利用opencv的api,cv2.calibratecamera得到旋转平移向量,编制转换关系函数,实现像素坐标和世界坐标互转,并获取第二工业相机的世界坐标。
9.根据权利要求8所述的自适应高精度芯片贴片装置的贴片方法,其特征在于,采用公式相机位姿=旋转矩阵转置r*平移向量t,得到第一工业相机和第二工业相机的世界坐标。
10.根据权利要求5-9中任一项所述的自适应高精度芯片贴片装置的贴片方法,其特征在于,采用公式编制转换关系函数,进行像素坐标和世界坐标互转。
技术总结
本发明公开了一种自适应高精度芯片贴片装置,包括有工作台,及安装于工作台外周位置的移动座,及安装于移动座上的贴片头,及安装于工作台中部位置的PCB夹持座,及安装于工作台上、并邻靠PCB夹持座的芯片放置座,该贴片头的吸嘴位置安装有电磁件,该工作台的一侧设置有可对PCB夹持座位置进行视觉识别的第一工业相机,及可对芯片放置座进行视觉识别的第二工业相机,该电磁件包括有卡装于贴片头吸嘴位置的空心软铁铁芯,及缠绕与空心软铁铁芯外的导电绕组;该自适应高精度芯片贴片装置能够适用于多个不同大小的芯片进行贴片,贴片精度高,抓取稳定,灵活度和智能化较高。
技术研发人员:范凯芸,黄瑞贤,廖厚昌,李祥,陈瑶,万生,乔昕明,李文龙,李文静,丁迎峰
受保护的技术使用者:深圳康桥信息科技有限责任公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!