一种建筑室内智慧照明控制方法、装置、设备及存储介质与流程
本发明属于智慧照明,具体涉及一种建筑室内智慧照明控制方法、装置、设备及存储介质。
背景技术:
1、智慧照明是指结合物联网(internet ofthings,iot)技术,实现照明的自动控制和节能减排的技术理念,由于其能提高用户体验和生活舒适度,已成为目前较为热门的产业。
2、目前,建筑室内照明普遍包括有多个照明灯,其中,所述多个照明灯设置在同一房间的不同位置,以便对整个室内区域进行照明。但是当建筑室内无人或仅有一到两个人时,若所有照明灯全部点亮,将会造成不必要的浪费;而若想结合物联网技术自动实现人来开灯、人走灯灭以及按需分配照明亮度的功能,则需要在室内各个位置安装昂贵的红外传感器,以便检测在对应位置下是否存在人,如此又会存在安装困难和硬件成本极高的问题。此外,现有室内照明控制技术也无法在照明需求与照明能耗之间取得平衡,导致能效难以得到提高的问题。
技术实现思路
1、本发明的目的是提供一种建筑室内智慧照明控制方法、装置、计算机设备及计算机可读存储介质,用以解决现有室内照明控制技术为实现按需分配照明亮度而存在安装困难和硬件成本极高的问题,以及也无法在照明需求与照明能耗之间取得平衡,进而导致能效难以得到提高的问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、第一方面,提供了一种建筑室内智慧照明控制方法,包括:
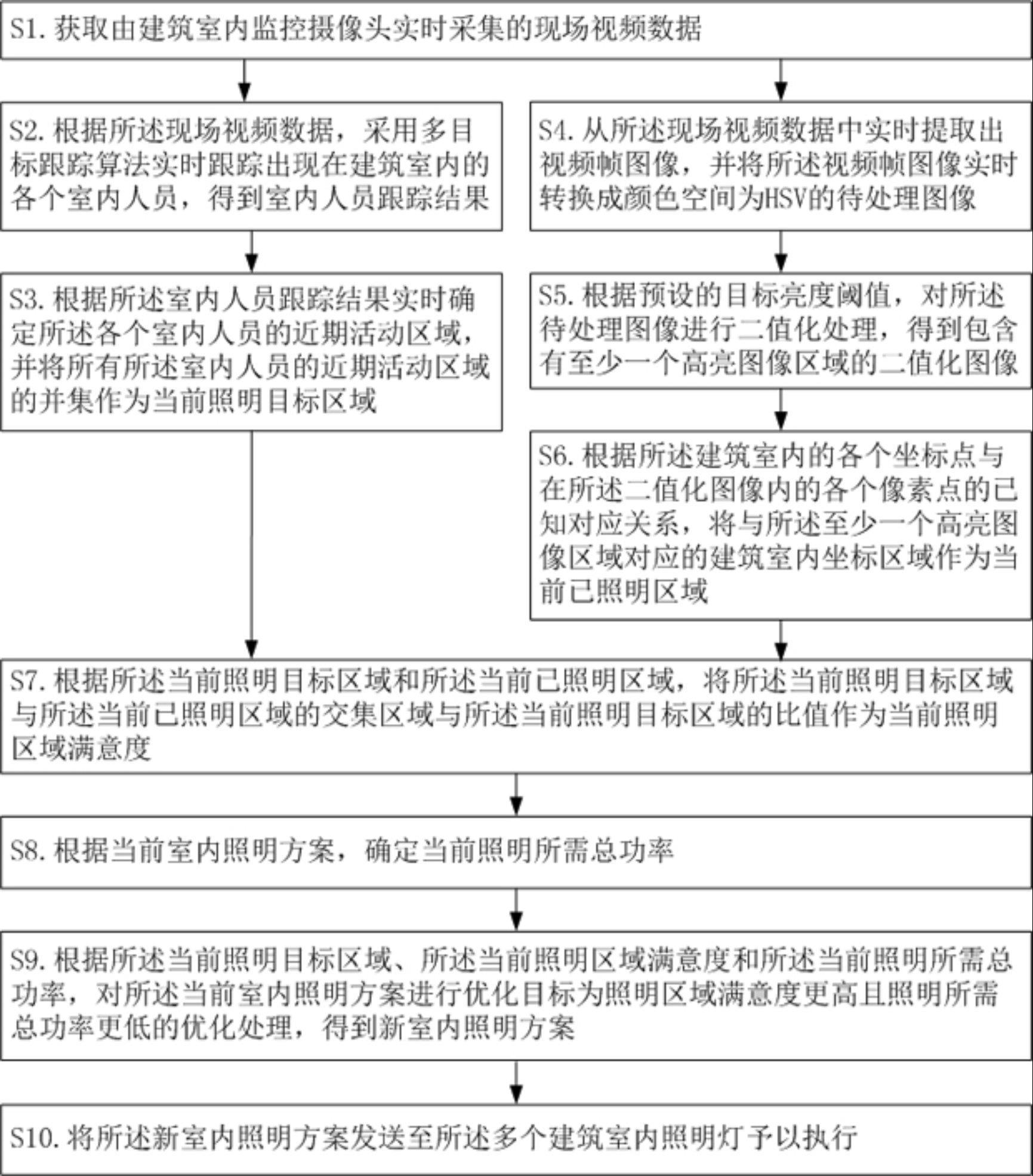
4、获取由建筑室内监控摄像头实时采集的现场视频数据;
5、根据所述现场视频数据,采用多目标跟踪算法实时跟踪出现在建筑室内的各个室内人员,得到室内人员跟踪结果;
6、根据所述室内人员跟踪结果实时确定所述各个室内人员的近期活动区域,并将所有所述室内人员的近期活动区域的并集作为当前照明目标区域;
7、从所述现场视频数据中实时提取出视频帧图像,并将所述视频帧图像实时转换成颜色空间为hsv的待处理图像;
8、根据预设的目标亮度阈值,对所述待处理图像进行二值化处理,得到包含有至少一个高亮图像区域的二值化图像,其中,所述高亮图像区域是指域内所有像素点的亮度值均大于等于所述目标亮度阈值的图像区域;
9、根据所述建筑室内的各个坐标点与在所述二值化图像内的各个像素点的已知对应关系,将与所述至少一个高亮图像区域对应的建筑室内坐标区域作为当前已照明区域;
10、根据所述当前照明目标区域和所述当前已照明区域,将所述当前照明目标区域与所述当前已照明区域的交集区域与所述当前照明目标区域的比值作为当前照明区域满意度;
11、根据当前室内照明方案,确定当前照明所需总功率,其中,所述当前室内照明方案包含有多个建筑室内照明灯的当前亮度值;
12、根据所述当前照明目标区域、所述当前照明区域满意度和所述当前照明所需总功率,对所述当前室内照明方案进行优化目标为照明区域满意度更高且照明所需总功率更低的优化处理,得到新室内照明方案;
13、将所述新室内照明方案发送至所述多个建筑室内照明灯予以执行。
14、基于上述
技术实现要素:
,提供了一种基于建筑室内现场视频数据更新室内照明策略的照明控制新方案,即根据由建筑室内监控摄像头实时采集的现场视频数据,先通过室内人员跟踪确定当前照明目标区域,以及通过二值化处理确定当前已照明区域,然后基于这两项结果确定当前照明区域满意度,最后根据当前照明区域满意度和当前照明所需总功率,对当前室内照明方案进行优化目标为照明区域满意度更高且照明所需总功率更低的优化处理,得到新室内照明方案并发送至多个建筑室内照明灯予以执行,如此仅需配置摄像头,可大大降低安装困难和硬件成本,同时还可在照明需求与照明能耗之间维持平衡,有效提高照明能效,便于实际应用和推广。
15、在一个可能的设计中,所述多目标跟踪算法采用deepsort目标跟踪算法,其中,所述deepsort目标跟踪算法包括有:针对未匹配的跟踪目标,根据对应的当前预测位置判断是否离开所述建筑室内,若是,则在下一次位置预测时舍弃该跟踪目标,否则在下一次位置预测时依然使用卡尔曼滤波法预测对应的位置。
16、在一个可能的设计中,根据所述室内人员跟踪结果实时确定所述各个室内人员的近期活动区域,包括:
17、针对某个室内人员,根据所述室内人员跟踪结果确定对应的且在预设最近时长范围内的至少一个轨迹点;
18、根据所述建筑室内的各个坐标点与在现场视频图像内的各个像素点的已知对应关系,确定与所述至少一个轨迹点一一对应的至少一个室内坐标点;
19、针对在所述至少一个室内坐标点中的各个室内坐标点,根据预设半径确定对应的且以对应坐标点为圆心的圆形区域;
20、将位于室内区域的且所有所述圆形区域的并集作为所述某个室内人员的近期活动区域。
21、在一个可能的设计中,根据所述当前照明目标区域、所述当前照明区域满意度和所述当前照明所需总功率,对所述当前室内照明方案进行优化目标为照明区域满意度更高且照明所需总功率更低的优化处理,得到新室内照明方案,包括:
22、获取在多个历史照明时段的历史室内照明方案、历史照明目标区域和历史已照明区域,其中,所述历史室内照明方案包含有所述多个建筑室内照明灯在对应历史照明时段的历史亮度值;
23、针对在所述多个历史照明时段中的各个历史照明时段,根据对应的历史照明目标区域和历史已照明区域,计算得到对应的历史照明区域满意度;
24、将所述各个历史照明时段的历史室内照明方案及历史照明目标区域作为输入项,以及将与所述各个历史照明时段对应的历史照明区域满意度作为输出项,对基于机器学习算法的人工智能模型进行率定验证建模,得到照明区域满意度预测模型;
25、根据所述当前照明目标区域、所述当前照明区域满意度和所述当前照明所需总功率,应用所述照明区域满意度预测模型,并采用灰狼优化算法对所述多个建筑室内照明灯的亮度值进行迭代寻优,得到最优室内照明方案和所述最优室内照明方案的照明区域满意度预测值;
26、根据所述当前照明区域满意度、所述当前照明所需总功率、所述最优室内照明方案和所述照明区域满意度预测值,按照如下公式计算得到满意度上升比例和总功率下降比例:
27、
28、式中,表示所述当前照明区域满意度,表示所述照明区域满意度预测值,表示所述当前照明所需总功率,表示根据所述最优室内照明方案确定的照明所需总功率;
29、判断条件是否成立,其中,和分别表示预设的权重系数且有;
30、若成立,则将所述最优室内照明方案作为对所述当前室内照明方案进行优化目标为照明区域满意度更高且照明所需总功率更低的优化处理结果,得到新室内照明方案。
31、在一个可能的设计中,所述机器学习算法采用支持向量机、k最邻近法、随机梯度下降法、多变量线性回归、多层感知机、决策树、反向传播神经网络或径向基函数网络。
32、在一个可能的设计中,根据所述当前照明目标区域、所述当前照明区域满意度和所述当前照明所需总功率,应用所述照明区域满意度预测模型,并采用灰狼优化算法对所述多个建筑室内照明灯的亮度值进行迭代寻优,得到最优室内照明方案和所述最优室内照明方案的照明区域满意度预测值,包括有如下步骤s941~s949:
33、s941.初始化种群:灰狼数目设置为,迭代次数设置为次,以及初始化所述多个建筑室内照明灯的亮度值搜索范围,然后执行步骤s942,其中,表示大于等于5的正整数,表示大于等于100的正整数;
34、s942.初始化灰狼:在个灰狼中随机选择三个灰狼作为初始的狼、狼和狼,并在所述亮度值搜索范围内初始化设置在所述个灰狼中的各个灰狼的个体位置向量,然后执行步骤s943,其中,所述个体位置向量包含有所述多个建筑室内照明灯的亮度搜索值;
35、s943.针对所述各个灰狼,将对应的当前个体位置向量作为一个室内照明方案与所述当前照明目标区域一起输入所述照明区域满意度预测模型,得到对应的照明区域满意度预测值,然后执行步骤s944;
36、s944.针对所述各个灰狼,根据所述当前照明目标区域、所述当前照明区域满意度、所述当前照明所需总功率和对应的照明区域满意度预测值,计算得到对应的个体适应度值,然后执行步骤s945,其中,所述个体适应度值按照如下公式计算得到:
37、
38、式中,表示所述当前照明区域满意度,表示与灰狼对应的照明区域满意度预测值,表示所述当前照明所需总功率,表示根据与灰狼对应的当前个体位置向量确定的照明所需总功率,和分别表示预设的权重系数且有;
39、s945.判断当前迭代次数是否达到次,若是,则执行步骤s949,否则将具有最大个体适应度值的灰狼作为新的狼,以及将具有次大个体适应度值的灰狼作为新的狼,以及还将具有再次大个体适应度值的灰狼作为新的狼,然后执行步骤s946;
40、s946.分别计算收敛因子、协同向量和协同向量,然后执行步骤s947,其中,所述收敛因子、所述协同向量和所述协同向量的计算公式分别如下:
41、
42、式中,表示当前迭代次数,表示双曲正切函数,和分别表示[0,1]的随机向量;
43、s947.针对各个狼,根据所述新的狼、狼和狼的当前个体位置向量,计算得到对应的且在第次迭代中的个体位置向量,然后执行步骤s948,其中,所述个体位置向量按照如下公式计算得到:
44、
45、式中,表示所述新的狼的当前个体位置向量,表示所述新的狼的当前个体位置向量,表示所述新的狼的当前个体位置向量,表示在第次迭代中的个体位置向量,、和分别表示随机计算所得的所述协同向量,、和分别表示随机计算所得的所述协同向量;
46、s948.使迭代次数自加1,然后返回执行步骤s943;
47、s949.将当前具有最大个体适应度值的灰狼的当前个体位置向量作为最优室内照明方案,并将与该灰狼对应的当前照明区域满意度预测值作为所述最优室内照明方案的照明区域满意度预测值。
48、在一个可能的设计中,所述建筑室内监控摄像头采用双目相机。
49、第二方面,提供了一种建筑室内智慧照明控制装置,包括有视频数据获取模块、室内人员跟踪模块、目标区域确定模块、图像转换处理模块、二值化处理模块、已照明区域确定模块、满意度计算模块、总功率确定模块、方案优化处理模块和照明方案发送模块;
50、所述视频数据获取模块,用于获取由建筑室内监控摄像头实时采集的现场视频数据;
51、所述室内人员跟踪模块,通信连接所述视频数据获取模块,用于根据所述现场视频数据,采用多目标跟踪算法实时跟踪出现在建筑室内的各个室内人员,得到室内人员跟踪结果;
52、所述目标区域确定模块,通信连接所述室内人员跟踪模块,用于根据所述室内人员跟踪结果实时确定所述各个室内人员的近期活动区域,并将所有所述室内人员的近期活动区域的并集作为当前照明目标区域;
53、所述图像转换处理模块,通信连接所述视频数据获取模块,用于从所述现场视频数据中实时提取出视频帧图像,并将所述视频帧图像实时转换成颜色空间为hsv的待处理图像;
54、所述二值化处理模块,通信连接所述图像转换处理模块,用于根据预设的目标亮度阈值,对所述待处理图像进行二值化处理,得到包含有至少一个高亮图像区域的二值化图像,其中,所述高亮图像区域是指域内所有像素点的亮度值均大于等于所述目标亮度阈值的图像区域;
55、所述已照明区域确定模块,通信连接所述二值化处理模块,用于根据所述建筑室内的各个坐标点与在所述二值化图像内的各个像素点的已知对应关系,将与所述至少一个高亮图像区域对应的建筑室内坐标区域作为当前已照明区域;
56、所述满意度计算模块,分别通信连接所述目标区域确定模块和所述已照明区域确定模块,用于根据所述当前照明目标区域和所述当前已照明区域,将所述当前照明目标区域与所述当前已照明区域的交集区域与所述当前照明目标区域的比值作为当前照明区域满意度;
57、所述总功率确定模块,用于根据当前室内照明方案,确定当前照明所需总功率,其中,所述当前室内照明方案包含有多个建筑室内照明灯的当前亮度值;
58、所述方案优化处理模块,分别通信连接所述满意度计算模块和所述总功率确定模块,用于根据所述当前照明目标区域、所述当前照明区域满意度和所述当前照明所需总功率,对所述当前室内照明方案进行优化目标为照明区域满意度更高且照明所需总功率更低的优化处理,得到新室内照明方案;
59、所述照明方案发送模块,通信连接所述方案优化处理模块,用于将所述新室内照明方案发送至所述多个建筑室内照明灯予以执行。
60、第三方面,本发明提供了一种计算机设备,包括有依次通信连接的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面或第一方面中任意可能设计所述的建筑室内智慧照明控制方法。
61、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如第一方面或第一方面中任意可能设计所述的建筑室内智慧照明控制方法。
62、第五方面,本发明提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面或第一方面中任意可能设计所述的建筑室内智慧照明控制方法。
63、上述方案的有益效果:
64、(1)本发明创造性提供了一种基于建筑室内现场视频数据更新室内照明策略的照明控制新方案,即根据由建筑室内监控摄像头实时采集的现场视频数据,先通过室内人员跟踪确定当前照明目标区域,以及通过二值化处理确定当前已照明区域,然后基于这两项结果确定当前照明区域满意度,最后根据当前照明区域满意度和当前照明所需总功率,对当前室内照明方案进行优化目标为照明区域满意度更高且照明所需总功率更低的优化处理,得到新室内照明方案并发送至多个建筑室内照明灯予以执行,如此仅需配置摄像头,可大大降低安装困难和硬件成本,同时还可在照明需求与照明能耗之间维持平衡,有效提高照明能效,便于实际应用和推广。
- 还没有人留言评论。精彩留言会获得点赞!