基于物联网的智能灯具控制方法及装置与流程
本发明涉及灯具照明控制,尤其涉及基于物联网的智能灯具控制方法及装置。
背景技术:
1、灯具照明控制技术,是指通过各种手段和设备来控制灯具的亮度、颜色和开关状态等,以满足不同场景和需求的照明控制需求,灯具控制技术可以通过物理开关、电子调光器、智能控制系统、传感器等方式实现。
2、现有的灯具照明控制技术通常都是将多个灯具连接到同一串联电路进行分区域性的统一控制,或是通过声控的方式对灯具进行智能控制,而在针对一些夜间用电少,例如大型办公楼,其在夜间只有少部分加班的用户会开启灯具,而大型办公楼内的灯具通常都是进行分区域性的控制,当极少数人进行加班时,将会导致用户打开大片灯具,从而提高了大型办公楼的用电量,针对声控的方式,此方法过于依赖声音阈值的设置,且需要定时发声才能启动,多用于楼道或走廊,以上方式均难以对灯具进行智能且精准的控制,现有的灯具照明控制技术还难以做到灯领人走,人在灯亮,人走灯灭的智能控制,比如在申请公开号为:“cn108184302a”的中国专利中,公开了“室内节能照明控制系统及控制方法”,该方案在对大型室内灯具进行控制时就采用了分区域性的控制,难以实现精准控制以及提前预测开启,为用户提供行进路线上前方的精确光照,该方案若想提高精度,则需要大量的检测装置,若检测装置数量较少,则精准度将会下降,现有的灯具照明控制技术还存在对用户所在位置的灯具的控制精度以及智能性不足,导致难以为用户提供行进路线上前方的精确光照的问题。
技术实现思路
1、针对现有技术存在的不足,本发明提供了基于物联网的智能灯具控制方法及装置,能够基于室内空间的平面图、灯具的安装位置以及灯具参数建立室内空间模型,将各灯具的位置以坐标的形式呈现,同时可以根据灯具的照明半径以及红外测距装置的探测半径判断红外测距装置的安装方案,针对不同的室内空间将红外测距装置安装于不同位置,基于红外测距装置获取与用户的距离以及方向,经过计算得到精确的用户坐标,通过用户坐标的改变得到行动轨迹,再建立行动轨迹预测模型对用户的行动轨迹进行预测,得到预测轨迹,再对预测轨迹进行分析,实时且精确地判断需要开启的灯具以及需要关闭的灯具,以解决现有的灯具照明控制技术还存在对用户所在位置的灯具的控制精度以及智能性不足,导致难以为用户提供行进路线上前方的精确光照的问题。
2、为了实现上述目的,第一方面,本发明提供基于物联网的智能灯具控制方法,包括如下步骤:
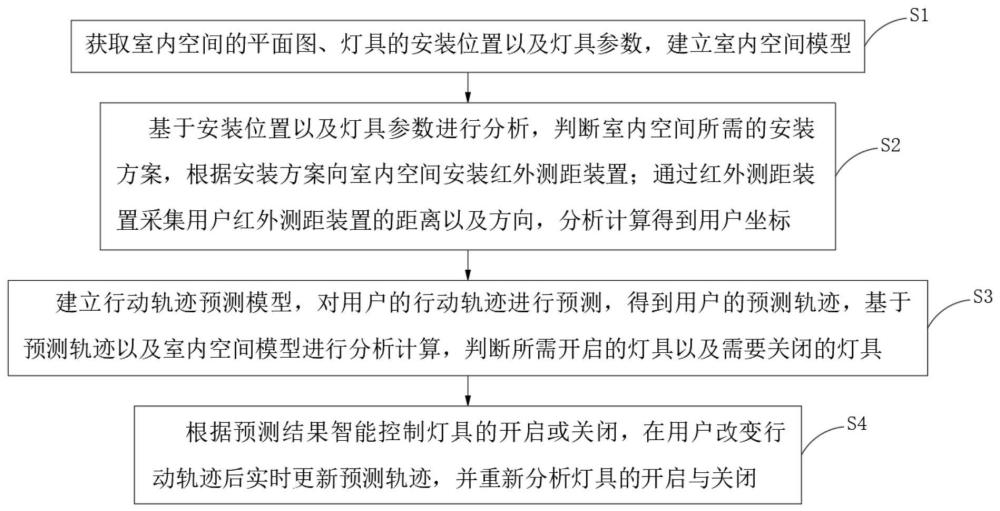
3、获取室内空间的平面图、灯具的安装位置以及灯具参数,建立室内空间模型;
4、基于安装位置以及灯具参数进行分析,判断室内空间所需的安装方案,根据安装方案向室内空间安装红外测距装置;通过红外测距装置采集用户红外测距装置的距离以及方向,分析计算得到用户坐标;
5、建立行动轨迹预测模型,对用户的行动轨迹进行预测,得到用户的预测轨迹,基于预测轨迹以及室内空间模型进行分析计算,判断所需开启的灯具以及需要关闭的灯具;
6、根据预测结果智能控制灯具的开启或关闭,在用户改变行动轨迹后实时更新预测轨迹,并重新分析灯具的开启与关闭。
7、进一步地,获取室内空间的平面图、灯具的安装位置以及灯具参数,建立室内空间模型包括如下子步骤:
8、读取建筑空间参数数据库,获取室内空间的平面图,标记为室内平面图,获取灯具的安装位置以及灯具参数,灯具参数包括灯具间距以及照明半径;
9、以室内平面图的一条长边为x轴,一条短边为y轴,该长边与短边的交点为原点,并将室内平面图放到第一象限,建立室内空间模型。
10、进一步地,基于安装位置以及灯具参数进行分析包括如下子步骤:
11、获取红外测距装置的探测半径;
12、随机选取一个安装位置,标记为探测中心,查找探测中心的探测半径内是否存在另一安装位置,若不存在,则选取第一安装方案进行安装;若存在,则选取第二安装方案进行安装;第一安装方案为在每个灯具内安装一个红外测距装置;
13、根据安装方案安装红外测距装置并获取用户坐标。
14、进一步地,第二安装方案包括:
15、获取灯具安装位置之间的距离,标记为灯具间距;
16、获取探测半径内距离探测中心最远的安装位置,标记为最外灯具,获取最外灯具与探测中心的距离,标记为最外距离;
17、计算探测半径与最外距离的差值,标记为最外探测范围;
18、将最外探测范围与灯具间距/2进行比对,若最外探测范围小于灯具间距/2,则输出范围不足信号;若最外探测范围大于灯具间距/2,则输出范围充足信号;若最外探测范围等于0,则输出范围精准信号;
19、以最外距离为半径,标记为最外半径,将安装于最外半径内的灯具整合为同一控制单位并标记为灯组,若输出范围不足信号,则灯组内不包括位于最外距离处的灯具;若输出范围充足信号,则灯组内包括位于最外距离处的灯具;若输出范围精准信号,则将最外距离处的灯具作为两个弹出范围的交界处;
20、以室内空间的入口为起点,对室内空间模型内划分灯组,在每个灯组的中心安装红外测距装置,将红外测距装置安装的坐标标记为红外坐标。
21、进一步地,根据安装方案安装红外测距装置并获取用户坐标包括如下子步骤:
22、对每个灯具进行编号,命名为灯具号,灯具号设置为ln,n为从1开始的正整数;
23、对每个红外测距装置进行编号,命名为红外编号,红外编号设置为rm,m为从1开始的正整数;
24、以红外测距装置监测区域内是否有用户通行,若有用户通行,则获取对应的红外编号,并通过红外测距装置检测用户相对于红外测距装置的距离以及方向,分别标记为用户距离以及相对方向;所述相对方向为基于红外坐标绘制与x轴平行的辅助线,测量用户与辅助线的夹角即为相对方向,且相对方向以辅助线上方以及红外坐标右方区域为锐角,相对方向范围为0°~360°;
25、获取红外编号对应的红外坐标,将红外坐标的x坐标以及y坐标分别标记为红外x坐标以及红外y坐标,获取用户距离与天花板的夹角,标记为距离夹角,基于公式d=cosλ×s计算用户在室内空间模型中相对红外测距装置的距离,标记为平面距离;其中,d为平面距离,λ为距离夹角,s为用户距离;
26、通过坐标计算公式计算用户在室内空间模型内的用户x坐标以及用户y坐标;
27、所述坐标计算公式分为x坐标计算公式以及y坐标计算公式,x坐标计算公式配置为:
28、
29、其中,xp为用户x坐标,xr为红外x坐标,f为室内空间模型的精度,θ为相对方向;
30、所述y坐标计算公式配置为:
31、
32、其中,yp为用户y坐标,yr为红外y坐标;
33、综合计算结果得到用户坐标为(xp,yp)。
34、进一步地,建立行动轨迹预测模型,对用户的行动轨迹进行预测包括如下子步骤:
35、建立行动轨迹预测模型,获取用户坐标,查找用户坐标相距最近的灯具号,开启对应灯具;
36、通过红外测距装置实时获取用户位置并在室内空间模型内显示,通过室内空间模型标记用户的行动轨迹;获取第一预测周期内用户的行动轨迹,获取行动轨迹的起始坐标以及终止坐标;
37、将起始坐标与终止坐标以直线相连,再将直线以起始坐标至终止坐标方向延长,延长得到一条射线,将以终止坐标为起点的射线标记为预测轨迹。
38、进一步地,根据预测结果智能控制灯具的开启或关闭包括如下子步骤:
39、读取照明半径,在室内空间模型内以圆形的方式进行显示;
40、获取用户实时的用户坐标,实时更新用户的行动轨迹并分析出预测轨迹;
41、获取预测轨迹,查找与预测轨迹第一个相交的照明半径所属的灯具号,标记为预测灯具启动号;将用户已经经过的灯具号标记为灯具待关闭号;
42、获取预测轨迹与预测灯具启动号的照明半径的交点坐标,标记为轨迹交点;通过距离计算公式对用户坐标以及轨迹交点进行计算,得到照明边缘距;
43、所述距离计算公式配置为:其中,l为照明边缘距,xs为轨迹交点x坐标,ys为轨迹交点y坐标;
44、根据计算结果对灯具进行智能控制。
45、进一步地,根据计算结果对灯具进行智能控制包括如下子步骤:
46、实时计算用户的预测轨迹的照明边缘距,当照明边缘距小于等于第一距离阈值时,控制开启预测灯具启动号对应的灯具,同时关闭灯具待关闭号对应的灯具;
47、若开启预测灯具启动号后,用户改变行动轨迹,此时的预测轨迹同步更新,重新获取预测轨迹对应的预测灯具启动号,并将前次分析得到的预测灯具启动号标记为前次启动灯具号;
48、重新计算预测灯具启动号的照明边缘距并分析是否开启灯具,若照明边缘距小于等于第一距离阈值并开启灯具时,关闭前次启动灯具号以及灯具待关闭号对应的灯具;
49、若用户的预测灯具启动号与灯具待关闭号相同,则取消灯具待关闭号的标记。
50、第二方面,本发明提供基于行动轨迹的灯具空间分布照明控制装置,包括数据收集模块、红外检测模块、室内空间模型、行动轨迹预测模块以及灯具智控模块;所述数据收集模块、红外检测模块、室内空间模型以及行动轨迹预测模块分别与灯具智控模块通讯连接;
51、所述数据收集模块用于获取室内空间的平面图、灯具的安装位置以及灯具参数,建立室内空间模型;
52、所述红外检测模块用于采集室内空间内用户的位置信息,标记为用户坐标;
53、所述室内空间模型用于显示室内空间的参数信息;
54、所述行动轨迹预测模块用于对用户的行动轨迹进行预测;
55、所述灯具智控模块用于根据预测结果智能控制灯具的开启或关闭。
56、第三方面,本技术提供一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,运行如上所述方法中的步骤。
57、本发明的有益效果:本发明通过建立室内空间模型并对灯具的安装位置以及灯具参数进行分析,判断红外测距装置的安装方案,再基于安装方案对室内空间安装红外测距装置,优势在于,可以确保红外测距装置的全覆盖并控制安装成本,保证了红外测距装置的百分百覆盖率并提高了设备安装的节约性;
58、本发明通过红外测距装置测量用户相对红外测距装置的用户距离以及相对方向,再对用户距离以及相对方向进行计算分析,精确判断用户所处在室内空间模型的用户坐标,优势在于,可以将用户的位置以坐标的形式录入室内空间模型,便于后续进行行动轨迹的预测,同时通过计算所得坐标能够提高数据的准确性,提高了行动轨迹预测的准确性以及灯具控制的精准性;
59、本发明通过实时监测用户的行动轨迹,在用户即将到达下一灯具的照明范围时提前开启灯具,优势在于,可以确保每次打开的灯具数量最少,同时用户得到的照明充足,且提前开启灯具可以确保用户了解前方行动路径上的环境信息,提高了灯具控制的智能性以及灯具的节能性;
60、本发明通过实时监测用户的行动轨迹,在用户改变行动轨迹时实时更新预测轨迹,并智能判断所需开启的灯具以及关闭的灯具,优势在于,可以确保每次开启的灯具能够提供给用户充足的照明,同时又能确保开启的灯具最少并及时关闭不需要的灯具,提高了灯具控制的智能性以及精确性。
61、本发明附加方面的优点将在下面的具体实施方式的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!