一种用于恒功率的电子镇流器及数字控制方法
本发明涉及数字开关变换器领域,可应用于舞台灯电子镇流器的恒功率控制电路及数字控制方法。
背景技术:
1、应用于hid灯(high intensity discharge,高压气体放电灯)的镇流器主要分为电感式和电子式两种。
2、电感式是以触发器产生高压而启动hid灯,传统电感式镇流器由铁芯电感线圈组成,在灯的发光过程中,通过自感起到稳定电路中电流的作用。一般来说,传统的电感式镇流器仍存在以下缺点:
3、电感线圈体积重量大,电感线圈的大体积使得灯具整体较为笨重,与期望的小型化、轻量化发展趋势不符;铁芯片在电磁场力的作用下产生较大噪声;没有设计恒压或恒功率等措施,负载特性发生变化时,功率也会发生变化,导致灯管老化,影响照明;缺少故障保护功能,智能化应用实现难度大。
4、电子镇流器的控制方式主要分为模拟控制方式与数字控制方式,模拟控制方式采用纯模拟电路分立元件控制,数字控制方式采用模拟分立元件与mcu(microcontrollerunit,微控制单元)、dsp(digital signal processing,数字信号处理)等数字控制电路组成。纯模拟电路搭建的方式,在智能控制方面上存在一些问题,且在调光上还存在与外部电路的切换问题,在增加控制电路时,还会影响控制参数的响应速度,且电感、电容等元器件还会对灯信号的变化量控制造成时延的影响,不仅成本较高,且结构复杂,适应性相对较差。数字控制方式可将控制策略合并到单个数字控制单元mcu或dsp中,易于实现且具有较好的移植性。同时,使用数字控制方式还可以提供一些保护功能,且基于物联网技术和无线通信系统还可实现智能化管理和照明控制。因此,基于数字控制方式的电子镇流器是未来发展趋势。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种能够实现功率调制及输出功率稳定功能,提高系统动态响应,减小输入电压突变、输出负载突变等扰动对输出功率的影响,提高系统的稳定性及可靠性高的恒功率控制电路及数字控制方法。
2、实现本发明的技术解决方案为:提出一种用于恒功率的电子镇流器及数字控制方法。
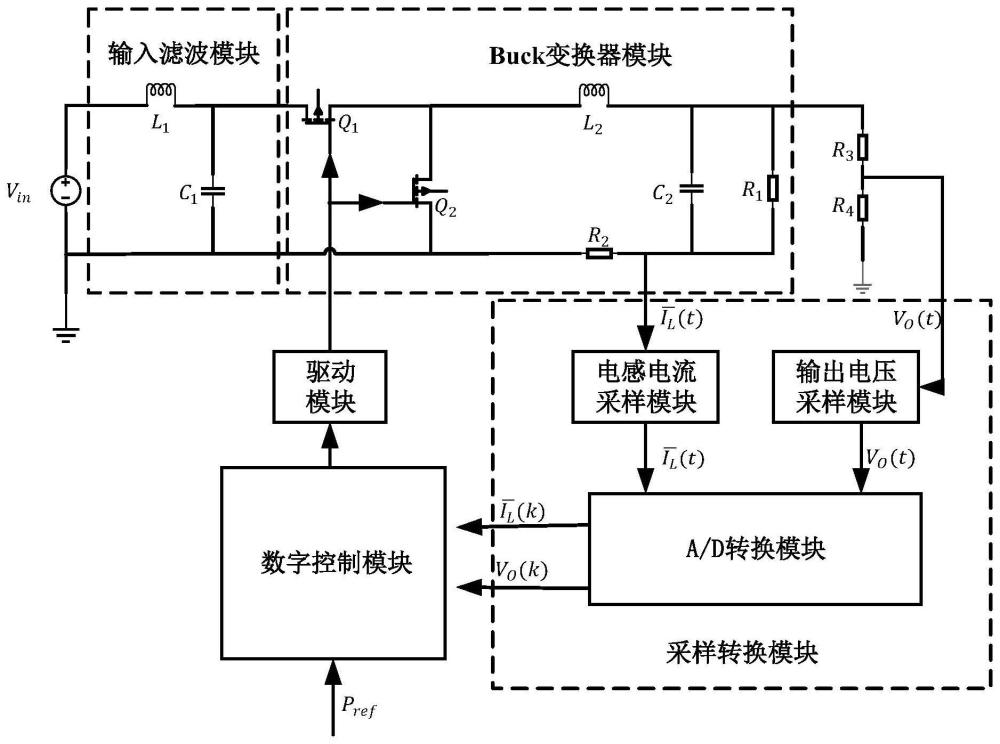
3、一种用于恒功率的电子镇流器电路,包括输入滤波模块、buck变换器模块、采样转换模块、数字控制模块、驱动模块。其中,采样转换模块包括输出电压采样模块、电感电流采样模块、a/d转换模块;数字控制模块包括乘法器模块、功率比较器模块、模糊控制模块、功率pid控制模块、电流比较器模块、电流pid控制模块、数字脉宽调制(dpwm)模块;其中:
4、所述输入滤波模块,用于过滤输入信号中的高频信号;
5、所述buck变换器模块,用于实现稳定状态下电流、电压、功率控制;
6、所述输出电压采样模块,用于将buck变换器模块的输出电压采样;
7、所述电感电流采样模块,用于将buck变换器模块的电感电流平均值采样;
8、所述a/d转换模块,用于将采样得到的时间连续的模拟信号,转换成离散的数字信号;
9、所述乘法器模块,用于根据平均电感电流和输出电压的数字信号,得到对应的输出功率值;
10、所述功率比较器模块,用于计算得到参考功率与输出功率的误差;
11、所述模糊控制模块,用于根据误差值及误差变化率得到功率pid控制模块中kp、ki、kd三个参数的对应变化值δkp、δki、δkd;
12、所述功率pid控制模块,用于根据功率误差值、δkp、δki、δkd计算得到电流pid控制模块的电流参考值;
13、所述电流比较器模块,用于计算得到参考电流与平均电感电流的误差;
14、所述电流pid控制模块,用于根据电流误差值计算得到下一个周期的占空比值;
15、所述dpwm模块,用于将得到的占空比值,与载波信号比较输出相应的pwm方波信号;
16、所述驱动模块,用于调节pwm信号的输出电压值,驱动开关管的导通和关断。
17、进一步地,该恒功率控制电路的拓扑结构如下:输入滤波模块的滤波电感l1的一端与直流输入电压vin的正端连接,滤波电感l1的另一端与滤波电容c1的一端以及开关管q1的漏级连接,滤波电容c1的另一端与直流输入电压vin的负端以及开关管q2的源级连接并接地;开关管q1的源级与开关管q2的漏级以及磁芯电感l2的一端连接,磁芯电感l2的另一端与滤波电容c2的一端、输出负载r1的一端连接以及分压电阻r3的一端连接,滤波电容c2的另一端与输出负载r1的另一端以及电流采样电阻r2的一端、电感电流采样模块的输入端连接,电流采样电阻r2的另一端与开关管q2的源级以及直流输入电压vin的负极连接在一起并接地;分压电阻r3的另一端与分压电阻r4串联,分压电阻r4的另一端接地,串联端与电压采样模块的输入端连接。
18、进一步地,所述a/d转换模块的输出端与数字控制模块两个输入端连接,数字控制模块的另一个输入端与参考功率pref连接;在数字控制模块中,乘法器模块的输入端与a/d转换模块的输出端连接,乘法器模块的输出端与功率比较器模块的负输入端连接,参考功率pref与功率比较器模块的正输入端连接,功率比较器模块的两个输出端与模糊控制模块连接,功率比较器模块的另一个输出端与功率pid控制模块一个输入端连接,模糊控制模块三个输出端与功率pid控制模块的另外三个输入端连接,功率pid控制模块输出端与电流比较器模块的正输入端连接,对电流采样转换的a/d转换模块的输出端与电流比较器模块的负输入端连接,电流比较器模块的输出端与电流pid控制模块的输入端连接,电流pid控制模块的输出端与dpwm模块的输入端连接,dpwm模块输出端与驱动模块的输入端连接,驱动模块的两个输出端分别与buck变换器模块开关管q1和q2的栅极连接。
19、一种用于恒功率电路的数字控制方法,采用双环模糊控制方法,包括电流内环与功率外环,功率外环采用模糊pid控制方法,电流内环采用pid控制方法;具体包括以下步骤:
20、1.在任意第k个开关周期,根据dpwm模块的载波、电感电流以及输出负载电流的关系,分别采样buck变换器模块的输出电压vo(t)和平均电感电流经过a/d转换模块转换得到相应的数字离散输出电压vo[k]以及离散平均电感电流其中电感电流平均值等于输出负载电流;
21、2.将得到的第k个开关周期的输出电压vo[k]以及离散平均电感电流通过乘法器可以得到当前开关周期时对应输出功率值po[k],将输出功率po[k]与参考功率pref比较得到误差值δp[k],根据前两个周期的功率误差值δp[k-1]、δp[k-2],可以得到当前周期功率误差值变化率δp′[k];
22、3.将得到的功率误差值δp[k]、功率误差值变化率δp′[k]通过模糊控制模块,在线调节δkp[k]、δki[k]、δkd[k]的值,得到当前周期功率pid控制模块三个对应的参数kp[k]、ki[k]、kd[k],将得到的δp[k]接入功率pid控制模块,通过控制参数kp[k]、ki[k]、kd[k]执行pid控制算法,实现采用模糊pid控制方法的功率外环控制,得到当前周期的电流给定值iref[k],作为电流内环的输入;
23、4.将得到的iref[k]与离散平均电感电流比较得到δi[k],经过电流pid控制模块计算,得到buck变换器模块开关管的导通占空比值d[k],实现采用pid控制方法的电流内环控制;
24、5.电流pid控制模块将占空比信号d[k]传输至dpwm模块,输出相应的pwm驱动信号,经驱动模块电压放大传输至buck变换器模块开关管q1和q2,调节buck变换器模块的输出电压vo(t)、电感电流il(t),从而调节输出功率po(t);
25、6.将buck变换器模块的模拟输出电压vo(t)、平均电感电流分别经过输出电压采样模块、电感电流采样模块,输入至a/d转换模块再次转换成离散数字信号,依次经过功率pid控制模块、电流pid控制模块、dpwm模块,产生新的pwm信号驱动控制buck变换器模块开关管q1和q2,循环控制以调节输出电压vo(t)、电感电流il(t),从而调节输出功率po(t),直至计算得到的输出功率值与参考功率一致。
26、进一步地,步骤3中所述的将得到的功率误差值δp[k]、功率误差值变化率δp′[k]通过模糊控制模块,根据模糊规则在线调节δkp[k]、δki[k]、δkd[k]的值,得到当前周期功率pid控制模块三个对应的参数kp[k]、ki[k]、kd[k],将得到的δp[k]接入功率pid控制模块,通过控制参数kp[k]、ki[k]、kd[k]执行pid控制算法,实现采用模糊pid控制方法的功率外环控制,得到当前周期的电流给定值iref[k],作为电流内环的输入;具体方法如下:
27、(1)模糊控制模块选择为二维模糊控制器,包括模糊化模块、模糊推理模块、解模糊模块;模糊化模块有两个输入端,分别输入功率误差值δp[k]、功率误差值变化率δp′[k],通过模糊化模块,选择隶属函数类别,在输入变量的模糊论域上设计模糊子集及其隶属函数;模糊推理模块包含模糊规则,根据模糊化模块对应模糊子集个数,模糊规则条数不同,根据专家经验,制定模糊规则;解模糊模块将模糊集合转换为清晰数值,通过解模糊方法,输出三个调节量,三个输出分别为δkp[k]、δki[k]、δkd[k];
28、(2)功率pid控制模块根据第k-1个周期得到的kp[k-1]、ki[k-1]、kd[k-1],加上经过模糊控制模块得到的三个对应调节量,得到当前周期的kp[k]、ki[k]、kd[k],其中:
29、kp[k]=kp[k-1]+δkp[k] (1)
30、ki[k]=ki[k-1]+δki[k] (2)
31、kd[k]=kd[k-1]+δkd[k] (3)
32、(3)功率pid控制模块为增量式pid计算控制,将第k个周期的输出功率po[k]与参考功率pref进行迭代计算,得到电流pid控制模块的给定输入值iref[k],具体单次迭代计算过程如下:
33、δp[k-2]=δp[k-1] (4)
34、δp[k-1]=δp[k] (5)
35、δp[k]=p[k]-pref (6)
36、δd[k]=kp[k](δp[k]-δp[k-1])+ki[k]δp[k]+kd[k](δp[k]-2δp[k-1]+δp[k-2]) (7)
37、iref[k]=iref[k-1]+δd[k] (8)进一步地,步骤4中将得到的iref[k]与离散平均电感电流比较得到δi[k],经过电流pid控制模块计算,得到buck变换器模块开关管的导通占空比值d[k],实现采用pid控制方法的电流内环控制;具体迭代方法如下:
38、δi[k-2]=δi[k-1] (9)
39、δi[k-1]=δi[k] (10)
40、
41、δd[k]=kp_i[k](δi[k]-δi[k-1])+ki_i[k]δi[k]+kd_i[k](δi[k]-2δi[k-1]+δi[k-2]) (12)
42、d[k]=d[k-1]+δd[k] (13)其中,kp_i[k]、ki_i[k]、kd_i[k]为电流pid控制模块的参数。
43、本发明的有益效果是:
44、(1)采用数字控制实现方式,相比于模拟控制更为灵活,方便不同功率下hid灯控制电路移植;
45、(2)模糊pid控制模块使传统pid控制器参数具有自适应性,可以在线实时调节pid参数;
46、(3)采用双环控制,实现了输出功率快速动态调节,减小了超调量,提高了系统稳定性;
47、(4)实现了在不同输出功率需求下恒功率状态稳定。
48、本发明的恒功率控制电路,体积小,适应性更好,能用于驱动舞台灯正常工作,保证发光稳定,延长灯的寿命,降低镇流器成本,同时便于管理与配置。
- 还没有人留言评论。精彩留言会获得点赞!