一种FPC全自动折弯机的制作方法
本技术涉及自动化生产设备,尤其涉及一种fpc全自动折弯机。
背景技术:
1、折弯机是一种用于摄像头fpc折弯的设备,在物料放入后,对摄像头的fpc进行折弯,便于后续安装操作。然而,目前市面上的折弯机只能依靠单边压紧的方式对产品进行压紧固定,因此精准度相对较差,并且在生产过程中会因为人工未放置好产品而导致夹爪发生碰撞,进而导致夹爪断裂、损坏的情况。
2、因此,现有技术存在缺陷,需要改进。
技术实现思路
1、本实用新型的目的是克服现有技术的不足,提供一种fpc全自动折弯机。
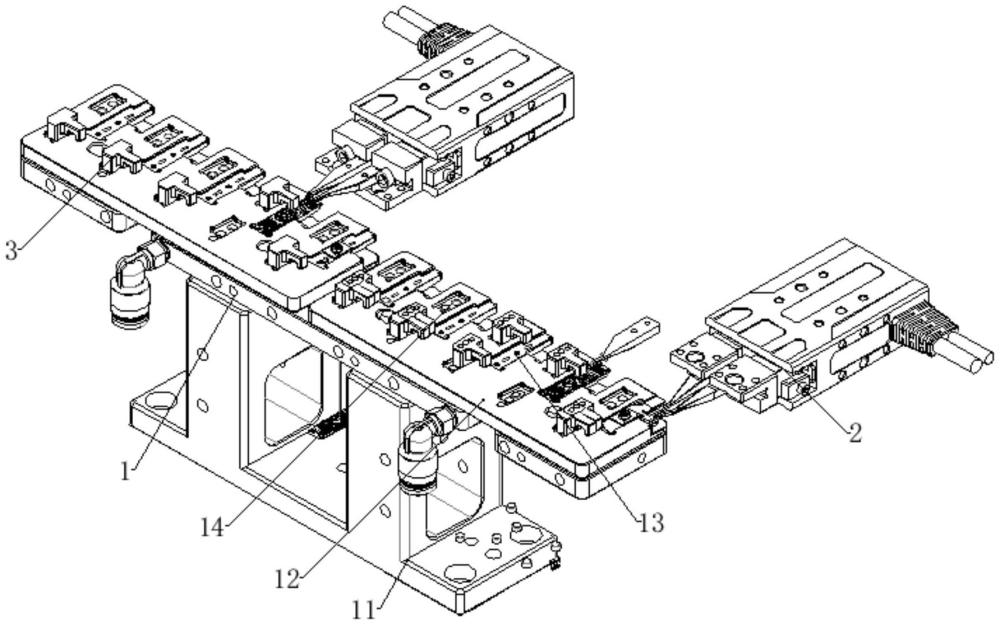
2、本实用新型的技术方案如下:提供一种fpc全自动折弯机,包括:结构平台、设置于所述结构平台旁侧的折弯组件、活动设置于所述结构平台上的压块、以及设置于所述结构平台上方的视觉系统组件,所述折弯组件包括:多轴移动模组、设置于所述多轴移动模组的运动端上的旋转模组、设置于所述旋转模组的运动端上的夹爪气缸、以及设置于所述夹爪气缸的输出端上的夹爪,所述多轴移动模组驱动旋转模组在x、y、z轴上移动,所述旋转模组驱动夹爪气缸进行旋转。
3、进一步地,所述多轴移动模组包括:设置于所述结构平台旁侧的x轴移动模组、设置于所述x轴移动模组的运动端上的y轴移动模组、以及设置于所述y轴移动模组上的z轴移动模组,所述旋转模组设置于z轴移动模组的运动端上。
4、进一步地,所述x轴移动模组、y轴移动模组以及z轴移动模组均包括:移动驱动电机、与所述移动驱动电机的输出端连接的丝杆、套设于所述丝杆上的丝杆滑块、以及与所述丝杆滑块连接的滑动座。
5、进一步地,所述旋转模组包括:旋转驱动电机、与所述旋转驱动电机的输出端连接的传动机构、以及与所述传动机构的输出端连接的转动支架,所述夹爪气缸设置于转动支架上,所述传动机构采用齿轮组。
6、进一步地,所述结构平台包括:平台支架、以及设置于所述平台支架上的若干定位治具,所述定位治具上面设置有若干放置槽,所述放置槽旁侧分别设置有若干压块放置槽,所述压块活动放置于压块放置槽上。
7、进一步地,所述视觉系统组件包括:悬于结构平台上方的视觉相机、设置于所述视觉相机上的镜头组件、以及设置于所述镜头组件前方的补光灯。
8、采用上述方案,本实用新型通过视觉系统组件对fpc的摆放状态进行图像获取与识别,然后多轴移动模组根据识别结果,将夹爪气缸移动至fpc需要进行折弯的位置处,启动夹爪气缸,使得夹爪将fpc上的端子或芯片进行夹持。夹爪气缸对fpc的端部进行夹紧后,旋转模组启动,使得夹爪气缸进行翻转,从而将fpc的端部折弯叠合于摄像头组件的电路板上,在通过压块对折弯处进行压制,放置fpc的端部回弹,最后夹爪气缸复位,释放fpc的端部,完成折弯工作。
技术特征:
1.一种fpc全自动折弯机,其特征在于,包括:结构平台、设置于所述结构平台旁侧的折弯组件、活动设置于所述结构平台上的压块、以及设置于所述结构平台上方的视觉系统组件,所述折弯组件包括:多轴移动模组、设置于所述多轴移动模组的运动端上的旋转模组、设置于所述旋转模组的运动端上的夹爪气缸、以及设置于所述夹爪气缸的输出端上的夹爪,所述多轴移动模组驱动旋转模组在x、y、z轴上移动,所述旋转模组驱动夹爪气缸进行旋转。
2.根据权利要求1所述的fpc全自动折弯机,其特征在于,所述多轴移动模组包括:设置于所述结构平台旁侧的x轴移动模组、设置于所述x轴移动模组的运动端上的y轴移动模组、以及设置于所述y轴移动模组上的z轴移动模组,所述旋转模组设置于z轴移动模组的运动端上。
3.根据权利要求2所述的fpc全自动折弯机,其特征在于,所述x轴移动模组、y轴移动模组以及z轴移动模组均包括:移动驱动电机、与所述移动驱动电机的输出端连接的丝杆、套设于所述丝杆上的丝杆滑块、以及与所述丝杆滑块连接的滑动座。
4.根据权利要求1所述的fpc全自动折弯机,其特征在于,所述旋转模组包括:旋转驱动电机、与所述旋转驱动电机的输出端连接的传动机构、以及与所述传动机构的输出端连接的转动支架,所述夹爪气缸设置于转动支架上,所述传动机构采用齿轮组。
5.根据权利要求1所述的fpc全自动折弯机,其特征在于,所述结构平台包括:平台支架、以及设置于所述平台支架上的若干定位治具,所述定位治具上面设置有若干放置槽,所述放置槽旁侧分别设置有若干压块放置槽,所述压块活动放置于压块放置槽上。
6.根据权利要求1所述的fpc全自动折弯机,其特征在于,所述视觉系统组件包括:悬于结构平台上方的视觉相机、设置于所述视觉相机上的镜头组件、以及设置于所述镜头组件前方的补光灯。
技术总结
本技术公开一种FPC全自动折弯机,包括:结构平台、折弯组件、压块、以及视觉系统组件,折弯组件包括:多轴移动模组、旋转模组、夹爪气缸、以及夹爪,多轴移动模组驱动旋转模组在X、Y、Z轴上移动,旋转模组驱动夹爪气缸进行旋转。本技术通过视觉系统组件对FPC的摆放状态进行图像获取与识别,然后多轴移动模组根据识别结果,将夹爪气缸移动至FPC需要进行夹持的位置处,启动夹爪气缸,将FPC上的端部进行夹持。夹爪气缸对FPC的端部进行夹紧后,旋转模组启动,使得夹爪气缸进行翻转,从而将FPC的端部折弯叠合于摄像头组件的电路板上,在通过压块对折弯处进行压制,放置FPC的端部回弹,最后夹爪气缸复位,释放FPC的端部,完成折弯工作。
技术研发人员:付建新,洪汉德,李石文,李浩
受保护的技术使用者:深圳市立创达自动化设备有限公司
技术研发日:20230817
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!