光学图像稳定器、光学图像稳定器系统及控制方法与流程
[0001]
本申请涉及电子及通信技术领域,尤其涉及光学图像稳定器、光学图像稳定器系统及其控制方法。
背景技术:
[0002]
生活中人们经常使用电子设备(如智能手机、平板电脑等)进行拍照,由此电子设备的拍照质量已经成为衡量电子设备的重要标准之一。
[0003]
电子设备在拍照、摄影过程中发生的抖动会使被拍摄物体在图像传感器,如cmos图像传感器(cmos image sensor,cis)上所呈现的图像发生偏移。通过光学图像稳定器(optical image stabilizer,ois)来反向移动镜组或移动cis等来补偿曝光期间因电子设备的抖动而使镜组和cis产生的位移,可以抑制抖动造成的成像模糊,改善成像质量。另外,电子设备在使用时存在着广泛的跌落,碰撞的可能,而光学图像稳定器中存在悬浮结构,在相应的冲击下极易被损坏。为了防止电子设备在跌落、碰撞时,造成其相机模组内部光学图像传感器的损坏,需要对冲击下的光学图像稳定器进行保护。
[0004]
目前主要通过被动或主动的方式对相机模组内部的光学图像稳定器进行抗冲击保护。被动式抗冲击通常在受到冲击时,通过压缩阻尼件变形,来缓解光学图像稳定器受到的冲击。但被动式抗冲击受限于阻尼件材料,抗冲击效果一般,且无法确保防止一次冲击后因为反弹而引起的二次冲击。相比于被动式抗冲击装置,现有的主动式抗冲击装置通常在受到冲击时,通过电磁力将镜组载台固定,来缓解光学图像稳定器受到的冲击。主动式抗冲击装置所用电磁力容易造成电磁干扰且不利于模组小型化,在大过载冲击下电磁力的贴紧程度有限。
技术实现要素:
[0005]
本申请提供一种光学图像稳定器、光学图像稳定器系统及控制方法。
[0006]
以下从多个方面介绍本申请,容易理解的是,该以下多个方面的实现方式可互相参考。
[0007]
第一方面,本申请实施例提供一种光学图像稳定器,包括:图像传感器和致动部件。所述致动部件包括承载台、基底、第一电极、第二电极。所述承载台承载所述图像传感器,所述承载台朝向所述基底的表面设置所述第一电极,所述基底朝向所述承载台的表面设置所述第二电极。在所述第一电极和所述第二电极非通电状态下,所述承载台承载的所述图像传感器处于悬浮状态;在所述第一电极和所述第二电极通电状态下,设置所述第一电极的所述承载台与设置所述第二电极的所述基底吸合,以固定所述图像传感器。可见,当冲击即将发生时,设置所述第一电极的所述承载台与设置所述第二电极的所述基底吸合,从而使所述光学图像稳定器无悬浮结构。因此可以实现在大过载冲击下,光学图像稳定器不被破坏,提高使用稳定性。
[0008]
根据第一方面,在一种可能的实现方式中,当设置所述第一电极的所述承载台与
设置所述第二电极的所述基底吸合时,所述第一电极和第二电极之间通过绝缘垫相隔离。所述绝缘垫可以保证第一第二电极相吸合时不发生短路。可选地,所述绝缘垫可以位于所述第一电极,或位于所述第二电极。
[0009]
根据第一方面,在一种可能的实现方式中,所述绝缘垫为悬臂梁式结构。悬臂梁式的结构增强了对吸合时所产生的冲击力的缓冲的作用。另外,所述绝缘垫可以为弹性绝缘材料,当设置所述第一电极的所述承载台与设置所述第二电极的所述基底吸合时,由所述弹性材料制成的所述绝缘垫可以缓解所述第二电极向所述第一电极运动的冲击力。
[0010]
根据第一方面,在一种可能的实现方式中,所述第二电极覆盖所述第一电极的正投影,当冲击即将发生时,所述第一电极与第二电极对正后,再互相吸合,减小了第二电极的面积并且减小了第二电极对第一电极的横向拉力。
[0011]
根据第一方面,在一种可能的实现方式中,所述第二电极覆盖所述第一电极活动范围的正投影的所有区域。当冲击即将发生时,所述第一电极与所述第二电极可以立即进入相吸合状态,所述承载台承载的所述图像传感器处于非悬浮状态,以稳定和保护光学图像稳定器。
[0012]
根据第一方面,在一种可能的实现方式中,所述致动部件还包括弹性连接件和驱动器,其中:所述弹性连接件连接所述承载台;所述驱动器连接所述基底和所述弹性连接件,所述驱动器通过所述弹性连接件带动所述承载台运动,以使承载台处于悬浮状态。可选地,所述驱动器包括可动部分和固定部分,所述驱动器固定部分与所述基底连接,所述驱动器可动部分与所述弹性连接件连接;所述驱动器可动部分通过所述弹性连接件带动所述承载台运动,以使承载台处于悬浮状态。
[0013]
根据第一方面,在一种可能的实现方式中,所述驱动器为三组或三组以上,所述承载台承载的所述图像传感器悬浮于所述驱动器围成的空间中。所述三组或三组以上驱动器可以通过承载台带动所述图像传感器在图像传感器成像面所在平面内的平动与转动。
[0014]
根据第一方面,在一种可能的实现方式中,所述图像传感器与所述驱动器之间设置缓冲垫,所述缓冲垫的高度和所述第一电极与第二电极之间设置的绝缘垫的高度相同。此种情况下,在冲击即将发生时,所述第一第二电极相吸合时,所述承载台承载的所述图像传感器处于非悬浮状态,所述光学图像稳定器的整体结构更稳定。
[0015]
根据第一方面,在一种可能的实现方式中,所述图像传感器到所述驱动器之间的距离与所述第一电极到所述第二电极之间的距离相等,所述距离相等以保证在冲击来临之前,所述第一第二电极相吸合时,所述承载台承载的所述图像传感器处于非悬浮状态,所述光学图像稳定器的整体结构更稳定。
[0016]
根据第一方面,在一种可能的实现方式中,所述驱动器为静电驱动器,所述静电驱动器的固定部分与所述静电驱动器的可动部分分别设置指状电极,所述静电驱动器的固定部分上的指状电极与所述静电驱动器的可动部分上的指状电极互相配合,组成静电梳齿结构。
[0017]
根据第一方面,在一种可能的实现方式中,在静电力的作用下,设置所述第一电极的所述承载台与设置所述第二电极的所述基底吸合。比如,在所述第一电极与所述第二电极之间静电力的作用下,所述第一电极可以通过所述承载台带动所述图像传感器向设置所述第二电极的所述基底方向运动。所述光学图像稳定器利用静电力将设置所述第一电极的
所述承载台与设置所述第二电极的所述基底吸合,不但避免了应用电磁力所带来的电磁干扰,而且使光学图像稳定器整体小型化。
[0018]
根据第一方面,在一种可能的实现方式中,所述静电力的大小和所述第一电极与第二电极之间的距离成反比。在吸合过程中,所述第一电极与所述第二电极之间距离不断减小,所述静电力不断增大,并且所述静电力的增大速度高于弹性连接件变形带来的弹性回复力的增大速度,因此静电吸合所需时间短,静电吸合力大,且不依赖于电压的升高,可以使光学图像稳定器迅速进入抗冲击状态。当冲击即将发生时,承载台所承载的图像传感器通过第一电极迅速与第二电极吸合,悬浮结构消失,图像传感器与基底形成一个稳定的整体以抗冲击。且静电吸合力大,在大过载冲击下第一第二电极贴紧效果佳,可抗二次冲击。
[0019]
第二方面,本申请实施例提供一种光学图像稳定器系统,所述系统应用于电子设备中,包括传感器、处理器、和前述任一实现方式提供的光学图像稳定器。所述传感器,用于采集电子设备的空间信息;所述处理器,用于判断所述传感器信号是否超过预设阈值,当所述传感器信号未超过所述预设阈值,控制所述光学图像稳定器工作于所述第一第二电极非通电状态;当所述传感器信号超过所述预设阈值,控制所述光学图像稳定器工作于所述第一,第二电极通电状态。通过传感器所采集到的空间信息并通过处理器对所采集到的空间信息进行判断,可以及时,精确地在冲击来临之前,对光学图像稳定器进行保护,有效的降低图像传感器的损坏的程度和概率。当冲击结束时,释放所述吸合电压,上,下电极恢复到非通电状态,所述承载台在弹性连接件的弹性回复力的作用下带动所述cis与所述下电极的垂直距离回复到初始值,承载所述cis的所述承载台处于悬浮状态,所述光学图像稳定器恢复正常工作形态。
[0020]
根据第二方面,在一种可能的实现方式中,所述静电力的大小和所述第一电极与第二电极之间的距离成反比。
[0021]
根据第二方面,在一种可能的实现方式中,所述传感器包括加速度传感器、陀螺仪传感器、光线传感器以及所述图像传感器的至少一种,其中所述传感器采集电子设备的空间信息包括加速度传感器采集所述电子设备的轴加速度,所述陀螺仪传感器采集所述电子设备的姿态角速度,所述图像传感器采集图像变化率,所述光线传感器采集光线明暗的变化率。所述传感器可以采集至少一个方面的信号,从而处理器可以从一个方面的信号或者结合多方面的信号来做出判断,提高了对冲击判断的准确率,以提高了所述光学图像稳定器的抗冲击能力。
[0022]
第三方面,本申请实施例提供一种相机模组,所述相机模组,包括镜头组,镜筒,和第一方面所述任一实现方式提供的光学图像稳定器,所述镜筒容纳所述镜头组和所述光学图像稳定器,所述光学图像稳定器位于所述镜头组的下方,成像光束经过镜头组后在所述图像传感器上成像。为了防止电子设备在跌落、碰撞时,造成其相机模组内部的图像传感器的损坏,对冲击下的光学图像稳定器进行有效的保护。
[0023]
第四方面,本申请实施例提供一种光学图像稳定器的控制方法,所述控制方法包括:接收传感器信号;判断所述传感器信号是否超过预设阈值;当所述传感器信号超过所述预设阈值时,控制所述光学图像稳定器的第一电极与第二电极之间的电压,以使设置所述第一电极的承载台与设置所述第二电极的基底吸合,从而稳定所述承载台承载的图像传感
器。可见,当处理器根据所接收到的传感器信号判断光学图像稳定器进入抗冲击状态,即第一第二电极通电状态,所述第一电极的所述承载台可以带动所述图像传感器向设置所述第二电极的所述基底方向运动,使所述承载台与所述基底相吸合,所述光学图像稳定器无悬浮结构。从而实现在大过载冲击下保护光学图像稳定器不被破坏,提高使用稳定性。当冲击结束时,释放所述吸合电压,上,下电极恢复到非通电状态,所述承载台在弹性连接件的弹性回复力的作用下带动所述cis与所述下电极的垂直距离回复到初始值,承载所述cis的所述承载台处于悬浮状态,所述光学图像稳定器恢复正常工作形态。
[0024]
根据第四方面,在一种可能的实现方式中,所述传感器信号包括电子设备的轴加速度,电子设备的姿态角速度,图像变化率和光线明暗的变化率中的至少一种。所述控制方法,通过接收至少一种传感器信号,提高了对冲击判断的准确率,以提高了所述光学图像稳定器的抗冲击能力。
[0025]
根据第四方面,在一种可能的实现方式中,在静电力的作用下,设置所述第一电极的所述承载台与设置所述第二电极的所述基底吸合,所述静电力的大小和所述第一电极与第二电极之间的距离成反比。所述静电力的增大速度高于弹性力的增大速度,静电吸合所需时间短,且不依赖于电压的升高,使光学图像稳定器迅速进入抗冲击状态。当冲击即将发生时,承载台所承载的图像传感器通过第一电极迅速与第二电极吸合,所述承载台承载的所述图像传感器处于非悬浮状态,图像传感器与基底形成一个稳定的整体以抗冲击。且静电吸合力大,在大过载冲击下第一第二电极贴紧效果佳,可抗二次冲击。
[0026]
根据第四方面,在一种可能的实现方式中,当所述传感器信号超过所述预设阈值时,所述承载台在弹簧回复力和驱动力作用下回到与第二电极正对位置后,控制所述光学图像稳定器的第一电极和第二电极之间的电压,以使设置所述第一电极的承载台与设置所述第二电极的基底吸合,所述承载台承载的所述图像传感器处于非悬浮状态,从而稳定所述光学图像稳定器。
[0027]
根据第四方面,在一种可能的实现方式中,当所述传感器信号超过所述预设阈值时,设置所述第一电极的所述承载台和所述图像传感器保持当前所在位置,控制所述光学图像稳定器的第一电极和第二电极之间的电压,以使设置所述第一电极的承载台与设置所述第二电极的基底吸合,从而稳定所述承载台承载的图像传感器。当异常即将发生时,所述第一电极无需与第二电极对正,承载所述第一电极的所述承载台所受的驱动力及弹性连接件的回复力不变,即可与下电极吸合。
[0028]
第五方面,本申请实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第四方面所述光学图像稳定器系统的控制方法。
[0029]
因此,本申请实施例的任一种方面及任一种方面的任一种可能的实现方式,在冲击即将发生时,利用所述第一,第二电极静电吸合作用,设置所述第一电极的承载台与设置所述第二电极的基底吸合,所述承载台承载的所述图像传感器处于非悬浮状态,使所述光学图像稳定器无悬浮结构。在冲击发生时,能够使所述光学图像稳定器不受损坏。
附图说明
[0030]
图1是本申请实施例一提供的一种相机模组的结构示意图;
[0031]
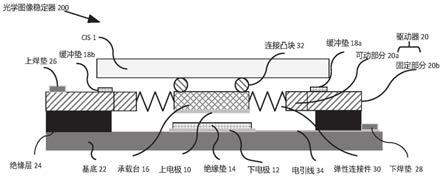
图2是本申请实施例二所提供的一种光学图像稳定器的结构示意图;
[0032]
图3是本申请实施例三所提供的一种光学图像稳定器的结构示意图;
[0033]
图4是本申请实施例四所提供的一种光学图像稳定器的结构示意图;
[0034]
图5是本申请实施例五所提供的一种光学图像稳定器的结构示意图;
[0035]
图6是本申请实施例中光学图像稳定器的第一、二电极静电吸合作用原理解析图;
[0036]
图7是本申请提供的光学图像稳定器第一,第二电极非通电状态(a)与通电状态(b)的结构示意图;
[0037]
图8是本申请实施例提供的一种光学图像稳定器的致动部件的驱动器的俯视示意图;
[0038]
图9是本申请实施例提供的另一种光学图像稳定器的致动部件的驱动器的俯视示意图;
[0039]
图10是本申请实施例提供的一种光学图像稳定器系统的结构示意图;
[0040]
图11为本申请实施例提供的一种光学图像稳定器系统的控制方法的流程示意图;
[0041]
图12为本申请实施例提供的另一种光学图像稳定器系统的控制方法的流程示意图;
[0042]
图中各元件的标号如下:
[0043]
图像传感器(cis)1,第一电极 10,第二电极 12,绝缘垫 14,承载台 16,缓冲垫 18a,18b, 驱动器 20,驱动器的可动部分 20a,驱动器的固定部分 20b,基底 22,绝缘层 24,上焊垫 26,下焊垫 28,弹性连接件 30,连接凸块 32,滤光片 34,夹持器 36,镜头组 180,镜筒 120,光学图像稳定器 100-500,pcb 140,相机模组 1000,致动部件 60,可动导电极板 601,导电定极板 602,固定锚点 605,弹性连接件 606。
具体实施方式
[0044]
本申请实施例提供一种光学图像稳定器、光学图像稳定器系统及其控制方法,该稳定器及稳定器系统可以应用在具有拍照功能的电子设备上,例如,可以应用在手机、平板电脑、数码相机等电子设备上。本发明实施例的光学图像稳定器包括第一电极和第二电极,当冲击即将发生时,所述光学图像稳定器的第一,第二电极在通电状态下,设置所述第一电极的承载台与设置所述第二电极的基底在静电力作用下吸合,因此所述承载台承载的图像传感器悬浮状态消失,稳定器整体变为固定结构,在冲击过程中不易被破坏。且由于静电力的大小和所述第一电极与第二电极之间的距离成反比,承载台与基底的吸合牢固,即使在大冲击下仍能保证吸合,且不会受到二次冲击的影响。静电力的使用无电磁干扰且有利于光学图像稳定器小型化,能够防止二次冲击,在大过载冲击下仍能稳定保护该光学图像稳定器。二次冲击指一次冲击后因为反弹而引起的再次冲击。
[0045]
如图1所示为本申请实施例一所提供的相机模组1000。相机模组1000主要应用于电子设备中实现光学图像防抖的功能场景,包括镜头组180,镜筒120,和稳定器100。镜头组180 位于镜筒120内,稳定器100之上。稳定器100主要设置在相机模组1000中,以主动抗冲击。稳定器100可以为光学图像稳定器(optical image stabilizer,ois)。
[0046]
镜头组180的作用是利用透镜的折射作用,改变来自外界的光线光路,从而将外界的景物画面聚焦在图像传感器1上。其中,镜头组180中通常包括有一片或多片透明的光学镜片 (即透镜),这些光学镜片设置在沿镜头组180轴向(即镜头组180光轴的方向)的不同
位置,照射进镜头组180的外界光线在沿着镜头组180的光轴前进时,会在经过不同光学镜片时产生折射,最后聚焦在图像传感器1的感光面,使图像传感器1形成清晰的图像。
[0047]
所述稳定器100包括致动部件60和图像传感器1。
[0048]
致动部件60,如微电机系统(micro electromechanical system,mems)马达。优选的,光学防抖致动部件直接或间接的与cis 1连接,并通过控制cis 1反向运动来补偿相机模组的晃动。具体的,可以通过陀螺传感器等传感器检测到手的振动,并把它转化为电信号,经过处理之后,形成控制信号来控制光学防抖致动部件带动cis 1的感光面在其所在平面内运动,抵消由于手震引起的成像偏移和抖动现象。其中,微机电系统(mems)马达为光学防抖致动部件中的一种。微机电系统(mems)是指尺寸在微米甚至亚微米量量级的电气、微机械混合系统。mems制造技术是专门用于制造微机电系统的加工工艺技术。使用mems制造技术来制作mems马达,并将其用来驱动cis以实现ois功能,这种方法相比于其他方法,例如使用音圈马达的方法,具有非常明显的尺寸优势,有助于整个相机模组的小型化,适合现有的电子设备的发展要求。
[0049]
图像传感器1,比如cmos图像传感器(cmos image sensor,cis),是一种将光信号转换成电子信号的器件。图像传感器1位于镜头组180的成像侧,外界光线即可通过镜头组180 而聚焦在图像传感器1的感光面上,所述感光面上的感光元件对光线的光强等信息进行采集和记录,形成图像。图像传感器1也可以称为影像传感器,或感光芯片,或感光元件。具体来讲,图像传感器1的感光面可以与镜头组180的光轴垂直。
[0050]
其中,在本实施例中,所述致动部件60包括:第一电极10,第二电极12,承载台16,基底22,驱动器20和pcb板。本实施例中,以第一电极为上电极,第二电极为下电极为例说明。
[0051]
所述第一,第二电极10,12的焊垫和所述cis 1的焊垫通过绑线与所述pcb板140上的焊垫连接,以实现所述致动部件60与外界控制电路的电气连接。所述相机模组1000工作时,被拍摄物体的成像光束经过成像镜头组180在所述cis 1上成像。在第一,第二电极10,12 非通电状态下,即在光学图像稳定器的正常工作形态下,所述电子设备感测拍照时的抖动,产生电压控制信号,控制所述致动部件60运动,所述致动部件60带动所述cis 1产生补偿位移,所述补偿位移用于补偿所述cis 1抖动时所产生的位移。所述致动部件60能够带动所述cis 1完成在cis 1成像面所在平面内的平动与转动,进而实现光学图像防抖功能。通过在致动部件60的承载台16下表面和基底22上表面分别设置第一,第二电极10,12,所述承载台16上表面承载cis 1,所述承载台16承载的cis1处于悬浮状态,即所述cis 1悬空于所述基底22之上。当所述相机模组1000处于正常工作形态下,即无冲击状态或者冲击结束时,无电压施加于所述第一,第二电极10,12,所述第一电极10悬浮于所述第二电极12之上。当所述相机模组1000即将受到冲击时,第一,第二电极10,12处于通电状态下,通过静电力作用将第一,第二电极10,12相吸合,从而达到cis 1与基底22相吸合,使得冲击时悬浮结构消失,光学图像稳定器100整体变为固定结构,在冲击过程中不易被破坏。且由于静电吸合作用,承载台16与基底22的吸合牢固,即使在大过载冲击下仍能保证吸合,且不会受到二次冲击的影响。而且静电力的使用无电磁干扰且有利于小型化,而且能够防止二次冲击,在大过载冲击下仍能稳定保护该光学图像稳定器100。
[0052]
在一种具体的实时例中,当冲击即将发生时,即在,所述cis 1和所述承载台16保
持当前所在位置,所述电源器施加选定的吸合电压,所述第一,第二电极10,12吸合,进入抗冲击形态以接受冲击。
[0053]
在一种具体的实施例中,为冲击即将发生时,所述致动部件60对所述承载台16施加额外驱动力,所述cis 1和所述承载台16在弹簧回复力和致动部件60的驱动力作用下运动回到与所述第二电极12正对位置后,所述电源器施加选定的吸合电压于所述第一,第二电极 10,12,所述第一,第二电极10,12在静电力作用下吸合,进入抗冲击形态以接受冲击。
[0054]
本申请中的相机模组1000的设计方案可以应用在具有两个或更多个相机模组的用户设备中,提升用户拍照体验。另外,本申请中的相机模组1000的设计方案可以应用在潜望式或直立式摄像头模组中,潜望式或直立式摄像头模组中的致动部件60一般可采用mems马达。
[0055]
以上是对本申请中相机模组1000的各个实施例中所涉及的各种部件进行解释说明,以便于本领域技术人员理解。需要说明的是,上面所列出的部件并不是本申请中的相机模组所必须包括的部件。
[0056]
下面结合图2-图12介绍本申请所提供的光学图像稳定器200-500,系统1010及其方法 1100,1200的各种实施例,图2-图12实施例中以第一电极为上电极,第二电极为下电极为例说明,其中在通电状态下所述第一电极与所述第二电极极性相反。图2-图5中的光学图像稳定器 200-500可以应用于图1的相机模组1000中,比如可以实现相机模组1000中光学图像稳定器100 的功能。
[0057]
如图2所示,本申请实施例二所提供的光学图像稳定器200包括:cis 1,及致动部件60,所述致动部件60包括承载台16,基底22,上电极10,下电极12,绝缘垫14,缓冲垫18a,18b 及弹性连接件30。所述承载台16承载所述cis 1,所述承载台16朝向所述基底的表面设置所述上电极10,所述基底22朝向所述承载台的表面设置所述下电极12;在上,下电极非通电状态下,承载所述cis 1的所述承载台16通过所述弹性连接件30悬空于所述基底22之上;在上,下电极通电状态下,设置所述上电极10的所述承载台16带动所述cis 1向设置所述下电极12的所述基底22方向运动,使得设置所述上电极的所述承载台与设置所述下电极的所述基底吸合,所述承载台承载的所述cis 1处于非悬浮状态,以稳定所述光学图像稳定器。
[0058]
所述上电极10通过所述承载台16与所述cis 1连接。所述承载台16承载所述cis 1。其中所述cis 1可以直接固定于所述承载台16上表面,或者通过连接件如连接凸块32与所述承载台 16相连接,所述cis 1与所述承载台16之间的距离可以通过之间的连接方式来调节。所述上电极10为导电材料,包括但不限于金属,重掺杂半导体等,或者为沉积导电层的绝缘材料。所述上电极10的面积不大于所述承载台16下表面的面积。所述上电极10通过所述承载台16,所述弹性连接件30、所述驱动器的固定部分20b后由上焊垫26引出与电源器相连。其中所述承载台16,所述弹性连接件30,所述固定部分20b,及所述焊垫26均为导电材料。所述承载台16 通过所述弹性连接件30与所述驱动器的可动部分20a相连。由于所述弹性连接件30为所述承载台16提供悬臂支撑,承载所述cis 1的所述承载台16通过所述弹性连接件30悬空于所述基底22 之上。
[0059]
如图2所示,所述下电极12固定于所述基底22上,所述绝缘垫14位于所述下电极12上与所述上电极10相对。所述下电极12四周由绝缘层24包围,所述绝缘层24也位于基底22之上。所述下电极12通过电引线34穿过所述绝缘层24一侧由所述下焊垫28引出与所述电源
器相连。所述下电极12和所述绝缘垫14覆盖所述上电极10的正投影。所述下电极12位于所述绝缘层24围合区域内,当所述上电极10回到正对所述下电极12的位置后,才与所述下电极12吸合,以减小所述下电极12及所述绝缘垫14的面积和减少所述上电极10受到来自于下电极的横向静电拉力。
[0060]
所述绝缘垫14使用例如橡胶之类摩擦力大,且为弹性,可形变的绝缘材料。当即将发生冲击时,所述上电极10与下电极12在静电力作用下相吸合时,所述绝缘垫14为弹性,可形变材料,可以缓冲所述上电极10撞向所述绝缘垫14时的受到的冲击。所述绝缘垫14摩擦力大,可以减小所述上电极10与下电极吸合后,在包含光轴方向在内的所有方向冲击下产生的滑动,从而进一步减轻冲击的损害。另外,所述绝缘垫14的摩擦力大,以及可形变的材料特性,可以使上下电极10,12吸合的更牢固,不易因二次冲击而分离。结构上,所述绝缘垫14不限于平板结构,也可以是悬臂梁结构等。
[0061]
图3为本申请实施例三所提供的一种光学图像稳定器的结构示意图,图3中的光学图像稳定器与图2的相类似,图3和图2的区别在于所述下电极12及所述绝缘垫14覆盖了所述上电极10 所活动的范围的正投影的所有区域。
[0062]
图4为本申请实施例四所提供的一种光学图像稳定器的结构示意图,图4中的光学图像稳定器与图3的相类似,图4和图3的所述下电极12及所述绝缘垫14覆盖了所述上电极10所活动的范围的正投影的所有区域。图4中绝缘垫14为悬臂梁结构。
[0063]
图5为本申请实施例五所提供的一种光学图像稳定器的结构示意图,图5中的光学图像稳定器与图4的相类似,图5和图4的所述绝缘垫14均为悬臂梁结构。图5中下电极12位于所述绝缘层24围合区域内,当所述上电极10回到正对所述下电极12的位置后,与所述下电极12吸合,以减小所述下电极12及所述绝缘垫14的面积和减少所述上电极10收到的横向拉力。
[0064]
如上所述,图4和图5的所述绝缘垫14均为悬臂梁结构,从结构上调节与所述上电极10的接触面积和接触方式,以达到增加摩擦力和减小冲击力的效果。可选地,所述绝缘垫14可以为单层或多层结构,也可由单一材料或者多种材料组成,与上电极10所接触的部分为绝缘材料。
[0065]
对图1-图5的所有实施例,在一种具体的实现中,所述绝缘垫14也可以位于所述上电极10 下表面,所述绝缘垫14与下电极12相对,所述绝缘垫的面积不超过所述上电极10下表面的面积,所述绝缘垫14使所述上下电极10,12相隔离。
[0066]
在一种具体的实施例中,所述绝缘垫14也可以位于所述下电极12上表面,所述绝缘垫与上电极10相对,所述绝缘垫14所覆盖的面积由所述下电极12的面积而定,所述绝缘垫14使所述上,下电极10,12相隔离。
[0067]
在一种具体的实施例中,所述绝缘垫14也可以分别位于所述上,下电极10,12相对的表面内,其中位于所述上电极10下表面的所述绝缘垫的面积不超过所述上电极10下表面的面积,位于所述下电极12上表面的所述绝缘垫的面积由所述下电极12的面积而定。所述绝缘垫的结构与材料与上述图2-5中的实施例的绝缘垫相同,所述绝缘垫14使所述上下电极10,12相隔离。
[0068]
在一种具体的实施例中,在与所述cis 1下表面边缘下方所对应的所述驱动器20的固定部分20b的上表面上设置所述缓冲垫18a,18b,或者在所述cis 1下表面上设置所述
缓冲垫 18a,18b。所述缓冲垫为绝缘,摩擦系数大的可变形材料,如可采用聚合物树脂。所述缓冲垫 18a,18b用来缓解吸合时所述cis 1与所述驱动器间的冲击。摩擦系数大以减小静电吸合作用发生时所述cis 1与所述驱动器间横向滑动。同时,所述缓冲垫18a,18b为绝缘材料,防止吸合作用发生后所述cis 1与所述驱动器20直接接触造成的短路。为了保证所述光学图像稳定器 200-500的运动协调性,所述缓冲垫18a,18b的高度与所述上下电极10,12间的所述绝缘垫14 的高度相同,并且所述cis 1下表面到所述驱动器20的可动部分20a的距离与所述上电极10到所述下电极12之间的距离相等,以此确保当所述上电极10在静电力作用下向所述基底22运动所产生的位移与所述cis 1下表面到所述驱动器20的可动部分20a的位移相同,使得吸合后的所述光学图像稳定器200-500的结构牢固可靠,提高整体抗冲击的能力。
[0069]
当冲击即将发生时,所述上,下电极10,12吸合的原理描述如下:
[0070]
如图6所示,恒压源通过导电回路连接可动导电极板601和导电定极板602,在两导电极板间形成电势差v。该电势差会在两导电极板间形成静电力f。忽略惯性与阻尼的影响,所述可动导电极板601在静电力f作用下,克服弹性连接件606的弹性回复力,向导电定极板602靠近,产生位移。当电势差v一定,位移到一定位置时,所述可动导电极板601摆脱弹性回复力约束,与所述导电定极板602吸合,此为静电吸合作用。两导电极板间没有形成静电力时,两导电极板601,602间的距离为g,则静电力为
[0071][0072]
式(1)中,a为极板的面积,ε为介电常数。从式(1)可知,首先,当两导电极板吸合后,极板间距g=0,此时对应的静电力f为无穷大。这保证了极板的吸合在大冲击力下仍能保持稳定。另外,从式(1)可知,在可动导电极板601向下运动的过程中,f随着g的减小而增大,即f与g2成反比例。同时,在可动导电极板601向下运动的过程中,可动导电极板601受弹性连接件606的弹性力也在不断增大,弹性力的增大与两导电极板之间的距离g成线性变化。通过理论计算可得可动导电极板601向下拉动到初始间距g的2/3的位置时,静电力的增大速度高于作为平衡力的弹性力的增大速度。此时所需要的电压为k为系统总体的弹簧弹性系数。此后,即使不提高电压,由于随间距g缩小而增大的静电力f仍然会大于弹簧力,所述可动导电极板601就可以继续“自主”地加速靠近所述导电定极板602,直至两导电极板吸合,且加速度越来越大。因此静电吸合作用中的吸合所需时间是非常短的,且不依赖于电压的升高。这保证了本发明所提供的光学图像稳定器100-500,在判断冲击即将发生后,光学图像稳定器100-500能迅速进入保护形态,防止冲击带来的破坏。图6为图1-5中所述光学图像稳定器第一第二电极静电吸合原理的解释,比如所述上电极10可以理解为可动导电极板601或导电定极板602,相应地,所述下电极12可以理解为导电定极板602或可动导电极板601,尽管所述弹性连接件606的位置与图1-5中的弹性连接件的位置不尽相同。图6所解释的静电吸合原理适用于本发明的各个实施例。
[0073]
根据上述电极吸合原理,如图7(a)所示,所述光学图像稳定器700在上,下电极非通电状态下,即在光学图像稳定器正常工作形态下,即无冲击状态或者冲击结束时,无电压施加于所述上,下电极10,12,所述上电极10悬浮于所述下电极12上。如图7(b)当所述光学
图像稳定器700在冲击即将发生时,所述电源器通过所述上,下焊垫26,28施加电压于所述上,下电极10,12。在通电状态下,所述上,下电极极性相反,所述上,下电极10,12在静电力作用下,所述承载台16带动所述上电极10和所述cis 1向所述基底22方向运动,设置所述上电极10的所述承载台16与设置所述下电极12的所述基底22吸合,使所述上电极10和所述下电极 12相吸合。当所述承载台16带动所述上电极10和所述cis 1向所述基底22方向运动时,所述上,下电极间通过绝缘垫14相隔离。因此,在第一,第二电极通电状态下,即在冲击来临之前,所述光学图像稳定器700的悬浮结构消失,所述光学图像稳定器700整体成为固定结构,防止冲带来的破坏。图7所提供的第一,第二电极非通电状态与通电状态的结构示意图以图1所示的实施例中的光学图像稳定器100为例。类似的,图7所提供的第一,第二电极非通电状态与通电状态的结构示意图也可适用于图2-5所示的实施例中的光学图像稳定器。
[0074]
如图1-5所示的驱动器20可以为三组及以上。比如,承载台16可以通过弹性连接件30悬浮 (悬空)安装在至少三个驱动器20之间,即承载台16位于至少三个驱动器20围成的区域中,所述承载台16带动cis 1在驱动器的作用下完成在cis 1成像面所在平面内的平动与转动,进而实现光学图像防抖功能。
[0075]
图8和图9为本申请所提供的光学图像稳定器的致动部件的驱动器的不同实施例俯视示意图
[0076]
图8为所述光学图像稳定器800的俯视图,本实施例的所述致动部件60有四组静电驱动器,沿x轴、y轴分别布置两组,即驱动器x1、驱动器x2;驱动器y1、驱动器y2。所述静电驱动器由驱动器固定部分20b和驱动器可动部分20a共同组成。所述驱动器固定部分20b,实际是致动部件60固定部分的一部分,通过所述绝缘层24与所述基底22相连。所述驱动器可动部分20a 通过所述弹性连接件30与所述承载台16连接。连接的位置偏离所述承载台16的旋转中心,在该实施例中,在所述承载台16的四个角上。所述弹性连接件30为所述驱动器可动部分20a提供悬臂支撑。所述弹性连接件30同时为所述承载台16提供悬臂支撑。此外,在所述驱动器20的驱动力去除后,所述弹性连接件30的弹性形变提供弹性回复力,使得所述承载台16回复到中间位置。
[0077]
在一种具体的实施例中,如图8所示,每组所述驱动器固定部分20b与所述驱动器可动部分20a上设置互相配合的指状电极,共同组成静电梳齿结构。当给静电梳齿结构施加电压,由于静电力的作用,所述驱动器可动部分20a可动端朝着指定方向运动,并通过所述弹性连接件30推动所述承载台16。该实施例的所述致动部件60的四组驱动器20通过施力方向的配合能使可动载台实现在cis 1成像面所在平面内的平动与转动。图8中所示的同一轴向上的所述弹性连接件30及所述承载台16即为图2-5中的所述弹性连接件30和所述承载台16 的一种剖面图。即所述承载台16下方设置所述上电极10,上方与所述cis 1固定连接,即上方承载所述cis 1。所述致动部件60的基底上设置所述下电极12,所述绝缘垫14在所述下电极12之上,或在所述上电极10之上。在所述光学图像稳定器800在上,下电极非通电状态下,即光学图像稳定器的正常工作形态下,即无冲击或冲击已结束的状态下,无电压施加于所述上,下电极10,12,所述上电极10悬浮于所述下电极12之上。在上,下电极非通电状态下,即光学图像稳定器的正常工作形态下,,所述致动部件60的静电驱动器20主动推动所述承载台16带动所述cis 1进行定向、定量的运动,补偿由于电子设备的摄像模组抖动造成的
成像晃动。所述致动部件60能够带动所述cis 1完成在cis 1成像面所在平面内的平动与转动,进而实现光学图像防抖功能。在上,下电极通电状态下,即当冲击即将发生时,一种情况是所述致动部件60对所述承载台16的驱动力保持不变,即所述承载台16在cis 1 成像面所在平面内不因受到的所述致动部件60的额外驱动力而发生位移改变,所述电源器通过所述焊垫26,28施加电压于所述上,下电极10,12,所述上,下电极10,12在静电力作用下,所述上电极带动所述cis 1向所述基底22方向运动,使所述上电极10和所述下电极 12相吸合。另一种情况是,在上,下电极通电状态下,即当冲击即将发生时,所述致动部件 60对所述承载台16施加额外驱动力,使所述承载台16在弹性连接件的回复力和驱动力的作用下回到与下电极12对正的位置后,所述电源器通过所述焊垫26,28施加电压于所述上,下电极10,12,所述上,下电极10,12在静电力作用下,所述上电极12带动所述cis 1向所述基底22方向运动,使所述上电极10和所述绝缘垫14相吸合。当所述承载台16和所述上电极10回到对正位置后再受静电力的作用时,所述下电极12的尺寸可以减少至与上电极10 等大,同时可以减小上电极10收到的横向拉力。
[0078]
在一种具体的实施例中,如图9所示,为所述光学图像稳定器的致动部件60驱动器的另一种俯视图,本实施例的所述致动部件60有三组静电驱动器20,承载台16的形状为是三角形形状的情况下,可以使用三个驱动器20,三个驱动器20在基底22上呈正三角形的形状分布,围成一个三角形区域,承载台16的三个顶点分别通过性件连接件30悬空固定在每个驱动器20上。类似的,在上,下电极非通电状态下和通电状态下,三组静电驱动器的致动部件 60对承载台的驱动力与上述四组静电驱动器的致动部件60对承载台的驱动力相同。其他部分与图8类似,不现赘述。
[0079]
参见图10所示,本申请还提供一种光学图像稳定器系统的实施例。所述光学图像稳定器系统1010包括传感器1011,处理器1012,光学图像稳定器1013及电源器1014。该光学图像稳定器1013可以由前述实施例的任一光学图像稳定器实现。
[0080]
所述传感器1011包括加速度传感器、陀螺仪传感器、cis传感器、及光线传感器中的一种或多种。其中,所述加速度传感器提供电子设备三轴的加速度,判断是否有一轴加速度等于或大于一个重力加速度;如有,则所述电子设备可能即将遇到冲击。其中,所述陀螺仪传感器提供所述电子设备三轴的姿态角速度,判断是否所述电子设备处于不断翻滚的状态;如有,则所述电子设备可能即将遇到冲击。其中,所述cis提供图像变化率,如果所述cis接受的图像快速变化,则所述电子设备可能即将遇到冲击。其中,所述光线传感器提供光线明暗的变化,如果光线明暗快速变化,即所述电子设备处于不断翻滚的状态,可能即将遇到冲击。所述传感器将采集到的单一或综合数据(如电子设备的空间信息)传输给所述处理器,所述处理器负责依据所述传感器所采集的数据,根据预设阈值来判断冲击的即将发生或者冲击的结束,进而控制所述驱动器进行相应的动作。在本发明的实施例中,预设阈值可以由所述光学图像稳定器系统的内置程序预先设定,或者,预设阈值也可以由用户进行设置。其中所述光学图像稳定器系统1010的内置程序可以是既定好的程序也可以通过机器学习而了解用户使用该系统的习惯。
[0081]
当所述传感器1011实时监测的加速度,姿态角速度,图像变化率和光线明暗变化速度中的一种或者多种未超过预设阈值时,表明所述光学图像稳定器系统1010在上,下电极非通电状态下,即光学图像稳定器系统未处于冲击状态或者冲击已经结束,所述传感器
1011持续监测实时的上述信号的变化。本实施例中,所述传感器1011可以为一种或多种,多种传感器综合监测所得到的数据更可靠,对冲击的判断准确率更高。当综合检测所述多种传感器的数据,所述处理器1012对以上所述各传感器的数据分析进行权重计算而获得最终的判断结果。权重的系数来自于跌落试验获得。另外,所述处理器1012也可以根据人工智能对以上各传感器的数据分析进行综合判断。人工智能的学习基础来自跌落试验。所述传感器1011可以是特别为所述光学图像稳定器1013而设置也可以是与电子设备的其他模块共享。根据所述处理器1012 或者用户所设置的优先级来分配所述传感器1011对冲击的监测。
[0082]
当判断冲击即将发生,则处理器1012给所述光学图像稳定器1013的所述驱动器20发出指令,所述光学图像稳定器1013从上,下电极10,12非通电状态进入通电状态,即光学图像稳定器从正常工作形态进入抗冲击形态;当判断冲击已经结束,则给所述驱动器发出指令,所述光学图像稳定器1013的上,下电极10,12从通电状态恢复到非通电状态,即光学图像稳定器1013从抗冲击形态恢复到正常工作形态。即在光学图像稳定器正常工作形态下,无电压施加于所述上,下电极10,12,所述上电极悬浮于所述下电极之上。在光学图像稳定器正常工作形态下,即在上,下电极非通电状态下,光学图像稳定器1013的致动部件的驱动器主动推动所述承载台带动所述cis进行定向、定量的运动,补偿由于所述电子设备的相机模组 1000抖动造成的成像晃动。所述致动部件60能够带动所述cis完成在cis 1成像面所在平面内的平动与转动,进而实现图像防抖功能。当光学图像稳定器1013在上,下电极通电状态下,即当冲击即将发生时,一种情况是所述致动部件对所述承载台的驱动力保持不变,即所述承载台在x-y平面上不因受到的所述致动部件的额外驱动力而发生位移改变。所述电源器1014 通过所述焊垫施加电压于所述上,下电极,所述上,下电极在静电力作用下,所述上电极带动所述cis向所述基底方向运动,使所述上电极和所述下电极相吸合。另一种情况是所述致动部件对所述承载台施加额外驱动力,使所述承载台在弹簧回复力与驱动力的作用下回到与所述下电极正对位置后,所述电源器通过所述焊垫施加电压于所述上,下电极,所述上,下电极在静电力作用下,所述上电极带动所述cis向所述基底方向运动,使所述上电极和所述下电极相吸合,所述承载台承载的所述cis处于非悬浮状态,所述光学图像稳定器1013的悬浮结构消失,所述cis与所述基底形成一个稳定的结构,以抗冲击。
[0083]
所述光学图像稳定器系统1010中的所述传感器1011,所述处理器1012,及所述光学图像稳定器1013可以集成在一个处理模块中,也可以是各个单独存在的物理单元,也可以是两个或两个以上单元集成在一个模块中。上述各个模块可以采用硬件的形式实现,也可以采用软件功能的形式实现。如果以软件功能的形式实现,则相应的程序命令存储在本发明提供的介质中。
[0084]
图11是本申请实施例提供的一种光学图像稳定器系统控制方法的流程示意图,该流程可以基于图3-4,8-9所示的光学图像稳定器及图10所示的光学图像稳定器系统来实现,该方法可以由图10中的处理器实现,包括但不限于如下步骤:
[0085]
步骤s1101:接收传感器信号。
[0086]
具体地,当所述光学图像稳定器在上,下电极非通电状态下,即当光学图像稳定器正常工作形态时,所述上,下电极10,12间不施加电压,即所述光学图像稳定器处于正常工作形态,参考如图7(a)所示。在上,下电极非通电状态下,即光学图像稳定器正常工作形态下,所述致动部件60的驱动器20主动推动所述承载台16带动所述cis 1进行定向、定量的运
动,补偿由于所述电子设备的相机模组抖动造成的成像晃动。所述致动部件60能够带动所述cis 1完成在cis 1成像面所在平面内的平动与转动,进而实现图像防抖功能。所述处理器接收传感器监测的信号,所述传感器实时监测所述电子设备的工作形态,监测的信号可以是一种或者多种,如加速度,姿态角速度,图像变化率和光线明暗变化速度等。
[0087]
在本发明的实施例中,可以通过不同的方法获取加速度,姿态角速度,图像变化率或光线明暗变化速度,例如可以通过所述加速度计、所述陀螺仪、所述cis 1、所述光线传感器监测所述光学图像稳定器系统的加速度,姿态角速度,图像变化率或光线明暗变化速度,对此不做限制。
[0088]
步骤s1102:判断所述传感器信号是否超过预设阈值。
[0089]
具体地,所述处理器将获得的监测数据进行分析,根据预设阈值,做出判断。当判断结果没有超过阈值时,即为无冲击风险时,所述光学图像稳定器处于上,下电极非通电状态,即光学图像稳定器在正常工作形态,所述处理器持续接收传感器的监测信号,传感器继续监测电子设备的工作形态。
[0090]
步骤s1103:施加吸合电压,上下电极吸合,进入抗冲击形态。
[0091]
具体地,当判断结果为超出阈值时,即为冲击即将发生时,所述电源器施加选定的吸合电压,所述上下电极吸合,所述光学图像稳定器进入上,下电极通电状态,即光学图像稳定器进入抗冲击形态,以接受冲击。
[0092]
步骤s1104:接受冲击。
[0093]
具体地,冲击来临之时,由于所述光学图像稳定器已无悬浮结构,减小损坏的概率。另外,由于静电力的大小和所述上下电极间的距离成反比,悬浮结构吸合后稳定性提高,且吸合力大,无因反弹造成二次冲击。
[0094]
步骤s1105:冲击结束?
[0095]
具体地,综合监测持续监测冲击是否结束,如果冲击仍未结束,例如电子设备在楼梯上连续翻转跌落的状态,所述光学图像稳定器仍保持抗冲击形态,即施加吸合电压,上下电极吸合。
[0096]
步骤s1106:释放吸合电压,上,下电极恢复到非通电状态。
[0097]
具体地,当冲击结束时,释放所述吸合电压,上,下电极恢复到非通电状态,所述承载台在弹性连接件的弹性回复力的作用下带动所述cis与所述下电极的垂直距离回复到初始值,承载所述cis的所述承载台处于悬浮状态,所述光学图像稳定器恢复正常工作形态。
[0098]
在一种具体的实时例中,如图11所示,当判断结果为超出阈值时,即为冲击即将发生时,所述承载台保持当前所在位置,所述电源器施加选定的吸合电压,所述上,下电极10,12吸合,进入上,下电极通电状态,即光学图像稳定器抗冲击形态,以接受冲击。
[0099]
在一种具体的实施例中,如图12所示,图12是本申请实施例提供的另一种光学图像稳定器系统控制方法的流程示意图,该流程可以基于图1-9所示的光学图像稳定器及图10所示的光学图像稳定器系统来实现。区别于图11所示的光学图像稳定器系统控制方法,图12所示的光学图像稳定器系统控制方法在“步骤s1202:判断所述传感器信号是否超过预设阈值”之后,若传感器信号超过预设阈值,先进入“步骤s1203:承载台在弹簧回复力和驱动力作用下运动回到与所述第二电极对正位置”后,再实施“步骤s1204:施加吸合电压,上下电极吸合,进入抗冲击状态
“”
[0100]
具体地,当判断结果为超出阈值时,即为冲击即将发生时,所述承载台在弹簧回复力和所述致动部件的驱动力作用下回到与下电极对正的位置后,所述电源器施加选定的吸合电压于所述上,下电极,所述上,下电极在静电力作用下吸合,进入抗冲击形态以接受冲击。
[0101]
在上述的各种实施例中,所述补偿位移是补偿所述镜头组180在抖动时的位移,所述镜头组180的抖动一般是左右晃动,所述补偿位移也是位于与所述镜头组180的光轴大致垂直的平面内。所述与所述光轴大致垂直的平面是指与所述光轴之间的夹角为直角或小于45度的锐角或大于135度的钝角的平面。所述补偿位移一般是在与所述镜头组180的光轴大致垂直的方向上的位移。所述大致垂直是指所述位移的方向所在的直线与所述光轴所在的直线之间的夹角为直角或小于45度的锐角或大于135度的钝角。
[0102]
在上述的各种实施方式中,所述“正对位置”是所述致动部件对所述承载台没有施加任何作用力,也没有产生任何补偿位移。所述承载台及所述cis相对于所述致动部件的基底和所述下电极板是相对静止的且承载台的几何中心与镜组主光轴重合。
[0103]
在上述的各种实施方式中,所述“当前所在位置”是指所述承载台在当前所受的致动部件的作用力保持不变,当前所产生的补偿位移也保持不变。
[0104]
在上述的各种实施方式中,所述“非通电状态”,是指所述光学图像稳定器在“正常工作形态下”,即无冲击状态或者冲击结束时,无电压施加于所述上,下电极,所述上电极悬浮于所述下电极上。
[0105]
在上述的各种实施方式中,所述“通电状态”,是指所述cis即将受到冲击,撞击,即光学图像稳定器即将进入“抗冲击形态”。
[0106]
上述各实施例中的“固定连接”是指两个部件连接在一起后,不会发生相对的位移。电子设备可以是穿戴设备,车载终端,个人移动终端,个人计算机,多媒体播放器、电子阅读器,智能家居设备,或机器人等。所述个人移动终端也可以是智能手机,或平板电脑等。所述穿戴设备还可以是智能手环,或智能医疗设备,或头戴式终端等。所述头戴式终端设备可以是虚拟现实,或增强现实的终端等,例如:谷歌眼镜。所述智能医疗设备可以是智能测血压设备,或智能测血糖设备等。所述智能家居设备可以是智能门禁系统等。所述机器人可以是其他各种具有拍照或摄像功能的电子设备等。
[0107]
在本申请的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
[0108]
术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1