一种用于多智能机器人集群控制的室内定位系统的制作方法
1.本发明涉及智能机器人的导航定位领域,尤其是在室内环境中多智能机器人集群控制的定位导航。
背景技术:
2.智能化机器人作为一种自主、智能化的运输平台与载体,在高危、污染等人类难以生存的环境中代替人类执行特种任务是当前发展的主流趋势,而在机器人定位技术,环境感知技术是机器人智能化的基础,同时也是最薄弱的环节,传统的定位技术采用gps、北斗等导航技术在室外的环境中具有较好的效果,而对于室内的定位却没有得到良好的解决。
3.根据定位技术与传感器感知技术的不同,机器人室内定位技术主要由惯性导航定位,超带宽无线定位,光流技术定位等,然而对于整体环境的感知,与相对的全局坐标,这些系统没有解决好多个智能机器人在统一坐标系中全局位置的感知。
4.目前,对于多智能体机器人学术领域的研究均是在已知获取智能化机器人在实际中的位置和速度后再进行的理论研究与探索,而真正结合进行验证的甚少,其中一个重要的原因就是在于缺乏有效的室内定位设备,因此在室内环境下如何多智能机器人如何在统一的坐标系中获得位置对于学术研究具有重要的意义,因此,本发明设计一种用于多智能机器人集群控制的室内定位系统以解决现有技术中存在的问题。
技术实现要素:
5.为了弥补现有的技术不足,针对于多智能机器人集群的室内应用场景,对于现有技术的精度低、刷新频率低、误差大、难以获取在全局坐标系中的位置等问题,本发明提供了一种用于多智能机器人集群控制的室内定位系统,为在室内环境中研究智能集群的科研人员提供了高精度,高刷新频率,误差小,可获取全局坐标位置的系统,为科研人员进行算法研究提供了更好的条件,为智能机器人在室内环境中完成定位、导航,多智能机器人实现集群感知,群体协同、队形保持、队形变换、目标跟踪、目标围捕等提供一种高精度,高刷新速率的全局定位系统。
6.本发明所述的系统由如下的运动捕捉系统、数据分发系统、通信基站系统及多个智能化集群机器人构成,运动捕捉系统通过摄像头识别放置在智能机器人上的红外标定点获得机器人的位置,数据分发系统通过获取运动捕捉系统解析的智能机器人的位置,并在通信基站系统中查找智能机器人的ip地址,将位置信息发送给智能机器人,智能集群人启动后加入通信基站系统,并启动搜寻应答功能,当接收到数据分发系统的搜寻后应答自己的地址给数据分发系统,数据分发系统根据智能机器人的应答确定智能机器人在局域网络中的ip地址,将每个智能机器人的定位数据发送给智能机器人,智能机器人收到来自数据分发系统的定位数据后完成定位,实现定位导航。
7.具体的运动捕捉系统通过发射950nm的红外光,在智能机器人放置的标定点将反射该波长的红外光,并被运动捕捉系统的摄像头捕捉并解算得出智能机器人在全局坐标系
下的位置,通过不同机器人标定点放置不同的排列方式区分不同机器人的位置信息,运动捕捉系统将包含机器人id信息的位置数据发送给数据分发系统。
8.数据分发系统启动后在局域网络中定时向局域网中广播探测智能机器人在网的请求,在收到局域网中智能机器人的应答后,数据分发系统将智能机器人的id与ip地址存储记录。
9.数据分发系统在接收到运动捕捉系统识别的智能机器人的位置后,查询该位置id对应的ip地址,打包成json格式并通过udp的数据传输方式将位置数据发送给智能机器人。
10.智能机器人启动后自动加入局域网络,将启动探测应答服务,收到来自数据分发系统发起的探测请求后,应答自己的ip地址与id号。
11.智能机器人启动后将在局域网络中启动定位数据接收服务,收到来自数据分发系统的定位数据后解析定位数据完成定位导航。
附图说明
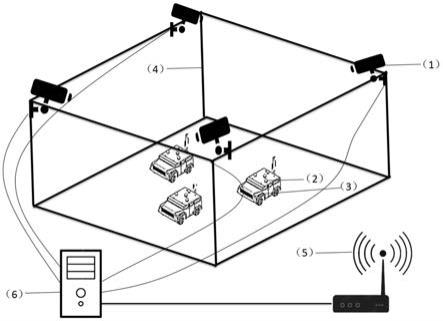
12.图1为本发明的硬件示意图;
13.图2为本发明的系统框架示意图。
14.图中:1、运动捕捉系统的红外摄像头;2、智能机器人上的标定点;3、单体智能机器人;4、系统固定支架;5、通信基站系统;6、系统主机。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围,
16.下面结合附图进一步详细描述本系统的技术方案。
17.如图1所示,运动捕捉系统的红外摄像头1是固定在固定支架系统固定支架4上的运动捕捉系统的红外摄像头,可发出950nm波长的红外光线并捕捉反射回来的950nm波长的红外光,通过捕捉智能机器人智能机器人上的标定点2上的标定点单体智能机器人3得到智能机器人智能机器人上的标定点2的位置。
18.如图1所示,智能机器人上的标定点2是以智能车为代表的单体智能化机器人,不同的智能机器人上粘贴有不同排列图案的标定点单体智能机器人3,运动捕捉系统运动捕捉系统的红外摄像头1识别不同图案的红外标定点,以确定不同机器人及其位置。
19.如图1所示,单体智能机器人3是粘贴在智能机器人上的标定点,标定点是粘贴有特殊反光材质的球体,可反射950nm波长的红外光。
20.如图1所示,系统固定支架4是固定支架,用于固定运动捕捉系统红外摄像头运动捕捉系统的红外摄像头1,同时一般也用于圈定出运动捕捉系统的有效识别区。
21.如图1所示,通信基站系统5是通信基站系统,通信基站系统通过有线或者无线的方式让智能机器人及系统主机系统主机6联系起来,并为在通信系统中的每一个独立的设备分配唯一的ip地址。
22.如图1所示,数据分发系统在运行在系统主机系统主机6上的软件系统,通过有线
或者无线的方式与通信基站系统通信基站系统5连接,并接收来自动作捕获系统的包含有智能机器人唯一标识的位置信息数据。
23.下面结合图2进一步对本系统进行进一步描述:
24.如图2所示,运动捕捉系统通过识别粘贴在智能机器人上的不同图案的以识别位置信息及包含有设备id的信息,并发送给数据分发系统,如识别的1号机器人的信息并打包成如下的格式:
25.{"device_id":"car1","x:":1.2,"y":-0.6,"z":1.5,"roll":0.123,"pitch":-1.34,"yaw":182.13}。
26.如图2所示,数据分发系统在通过有线或者无线的方式连接到通信基站系统,并通过通信基站系统向局域网络中定时发起查询请求,数据分发系统将包含有自身id信息及ip地址的数据向局域网络中通过ud广播,查询请求数据格式参考格式如下:
27.{"device_id":"server","server_ip:":"192.168.179.1"}。
28.如图2所示,智能机机器人监听本地的udp端口接收到来自数据分发系统的ip地址信息后,将包含有自己id如:car1、drone1及自己在通信基站系统处获取得到ip地址的信息回复给数据分发工具的广播地址线程,回复格式参考如下:{"device_id":"drone1","device_ip":"192.168.100.101"}。
29.如图2所示,数据分发系统中ip查询线程在收到智能机器人的回复后解析智能机器人的device_id字段以及device_ip字段,将以device_id即智能机器人的id字段为名称,device_ip字段为内容即智能机器人的ip地址的数据存储或者更新到id-ip数据字典中。
30.如图2所示,id-ip数据字典将存储以智能机器人id字符串为索引,以智能机器人在局域网中ip地址为内容的存储结构,同时提供查询与更新功能,当系统中智能机器人的ip地址发生变更时,数据分发系统将更新当前数据结构。
31.数据分发系统中数据分发线程在接收到来自运动捕捉系统的包含智能机器人名称的位置信息后,解析其中的devcei_id字段获取智能机器人的id后并查询智能机器人id-ip数据字典,如查询未获取到该id的相关信息,则不发送;如查询到该id的ip地址,则将动捕系统的位置信息数据发送给该ip地址以将定位数据发送给智能机器人。
32.智能机器人在接收到来自数据分发线程的发送的位置信息后,完成定位工作,实现了多智能机器人定位与导航。
33.通信基站系统将为系统提供提供通信服务,数据分发系统、智能机器人可通过有线或者无线的方式与通信基站系统建立连接,并为其分配唯一的ip地址。
34.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1