多径下单锚点定位的方法及通信装置与流程
多径下单锚点定位的方法及通信装置
1.本技术要求于2020年7月24日提交国家知识产权局、申请号为202010725675.8、申请名称为“一种提供辅助信息的方法及ue”的中国专利申请的优先权,其全部内容通过引用结合在本技术中。
技术领域
2.本技术涉及定位技术领域,尤其涉及一种多径下单锚点定位的方法及通信装置。
背景技术:
3.现有的包括车联网、智能驾驶、室内导航定位、智慧工厂、智能仓储等都对高精度定位有强的需求。除了这些垂直行业,消费类终端设备对高精度定位也有新的需求,包括物品定位跟踪、精准数据传输、智能支付、智能推送、智能钥匙等。
4.为了降低多锚点定位中的锚点部署成本以及锚点定位资源不足的问题,目前业界提出了单锚点定位技术,即只需要一个锚点就可以实现用户设备(user equipment,ue)定位。然而,在多径定位环境下,不同传输路径上信号的到达时间、角度信息都不一样,若基于不同路径的测距信息和角度信息进行单锚点定位,则无法保证定位精度。因此,如何保证使用相同路径上的角度信息和距离信息进行ue定位,成为保证单锚点定位精度的关键。
技术实现要素:
5.本技术提供了一种多径下单锚点定位的方法,通过参考节点根据待定位节点的指示,根据与待定位节点所用的相同的传输径测量定位信息,解决了由于待定位节点和参考节点定位信息不一致导致的定位精度低的问题。
6.第一方面,提供了一种多径下单锚点定位的方法,应用于待定位节点,包括:接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,所述第一传输路径为所述n条传输路径中的某一条传输路径;向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,所述第一指示信息用于指示所述第一传输路径,以使所述参考节点测量所述第一传输路径上的第二定位信息。
7.根据本技术实施例提供的多径下单锚点定位的方法,待定位节点通过向参考节点指示该待定位节点测量的定位信息所对应的传输径,使得参考节点基于相同的传输路径测量定位信息,能够保证待定位节点和参考节点基于相同的传输径完成定位信息的测量,从而在对待定位节点定位时,减少多径的影响,提高定位的准确性。
8.结合第一方面,在第一方面的某些实现方式中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述方法还包括:根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
9.应理解,由于首达径上的信号传输时延最小,其时间到达信息最为准确,因此能够
基于首达径获取准确的测距信息;而由于最强径上的信号强度最强,其对应的角度信息的误差最小,因此能够基于最强径获取准确的角度信息。
10.在一种实现方式中,如果首达径和最强径为同一条传输路径,那么可以根据首达径/最强径获取准确的测距信息和角度信息,保证定位的准确性。
11.在一种实现方式中,如果首达径和最强径为两条不同的传输路径,那么可以基于一定的判断准则,在首达径和最强径之间权衡,选择能够使定位误差更小的传输路径测量定位信息。
12.根据本技术实施例提供的多径下单锚点定位的方法,通过利用首达径或最强径测量定位信息,能够在多径环境下,保证定位的准确性。
13.结合第一方面,在第一方面的某些实现方式中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:当所述第一传输路径为所述首达径时,所述第一指示信息为1;当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,当所述第一传输路径为所述首达径时,所述第一指示信息为0;当所述第一传输路径为所述最强径时,所述第一指示信息为1。
14.结合第一方面,在第一方面的某些实现方式中,根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,包括:记录所述第一定位测量参考信号的第一到达时刻t2;测量所述第一定位测量参考信号的第一到达角aoa1。
15.结合第一方面,在第一方面的某些实现方式中,所述方法还包括:记录所述第二定位测量参考信号的第一发送时刻t3;和/或,测量所述第二定位测量参考信号的第一发射角aod1。
16.结合第一方面,在第一方面的某些实现方式中,所述方法还包括:向定位服务节点发送第三定位信息,其中,所述第三定位信息包括:所述第一到达时刻t2、所述第一发送时刻t3;或者,所述第一发送时刻t3和所述第一到达时刻t2的差值t3-t2;或者,所述第一到达时刻t2、所述第一发送时刻t3、以及所述第一到达角aoa1和/或所述第一发射角aod1;或者,所述第一发送时刻t3和所述第一到达时刻t2的差值t3-t2、以及所述第一到达角aoa1和/或所述第一发射角aod1。
17.结合第一方面,在第一方面的某些实现方式中,所述第一指示信息承载于信道状态信息中。
18.结合第一方面,在第一方面的某些实现方式中,所述信道状态信息还包括但不限于:预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
19.第二方面,提供了一种多径下单锚点定位的方法,应用于参考节点,包括:发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一传输路径,所述第一传输路径为所述n条传输路径中的某一条传输路径;根据所述第一指示信息,在所述第一传输路径上测量第二定位信息。
20.根据本技术实施例提供的多径下单锚点定位的方法,待定位节点通过向参考节点指示该待定位节点测量定位信息时所用的测量信息对应的波束,使得参考节点基于相同的测量信息完成定位信息测量,能够保证待定位节点和参考节点测量的定位信息对应同一波束内的传输路径,从而实现在多径环境下,避免其它波束多径的干扰,保证定位信息的准确
性。
21.结合第二方面,在第二方面的某些实现方式中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
22.应理解,由于首达径上的信号传输时延最小,其时间到达信息最为准确,因此能够基于首达径获取准确的测距信息;而由于最强径上的信号强度最强,其对应的角度信息的误差最小,因此能够基于最强径获取准确的角度信息。
23.在一种实现方式中,如果首达径和最强径为同一条传输路径,那么可以根据首达径/最强径获取准确的测距信息和角度信息,保证定位的准确性。
24.在一种实现方式中,如果首达径和最强径为两条不同的传输路径,那么可以基于一定的判断准则,在首达径和最强径之间权衡,选择能够使定位误差更小的传输路径测量定位信息。
25.根据本技术实施例提供的多径下单锚点定位的方法,通过利用首达径或最强径测量定位信息,能够在多径环境下,保证定位的准确性。
26.结合第二方面,在第二方面的某些实现方式中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:当所述第一传输路径为所述首达径时,所述第一指示信息为1;当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,当所述第一传输路径为所述首达径时,所述第一指示信息为0;当所述第一传输路径为所述最强径时,所述第一指示信息为1。
27.结合第二方面,在第二方面的某些实现方式中,所述根据所述第一指示信息,在所述第一传输路径上测量第二定位信息,包括:记录所述第二定位测量参考信号的第二到达时刻t4;测量所述第二定位测量参考信号的第二到达角aoa2。
28.结合第二方面,在第二方面的某些实现方式中,所述方法还包括:记录所述第一定位测量参考信号的第二发送时刻t1;和/或,测量所述第一定位测量参考信号的第二发射角aod2。
29.结合第二方面,在第二方面的某些实现方式中,所述方法还包括:向定位服务节点发送第四定位信息,其中,所述第四定位信息包括:所述第二发送时刻t1、所述第二到达时刻t4;或者,所述第二到达时刻t4和所述第二发送时刻t1的差值t4-t1;或者,所述第二发送时刻t1、所述第二到达时刻t4、以及所述第二到达角aoa2和/或所述第二发射角aod2;或者,所述第二到达时刻t4和所述第二发送时刻t1的差值t4-t1、以及所述第二到达角aoa2和/或所述第二发射角aod2。
30.结合第二方面,在第二方面的某些实现方式中,所述第一指示信息承载于信道状态信息中。
31.结合第二方面,在第二方面的某些实现方式中,所述信道状态信息还包括但不限于:预编码矩阵指示pmi信息、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
32.第三方面,提供了一种多径下单锚点定位的方法,应用于待定位节点,包括:接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;根据第一中间信息测量第一定位信息,所述第一中间信息包括第一传输路径在预编码子矩阵中对应的离散傅里叶变换dft基向量,所述第一传输路径属于所
述n条传输路径中的某一条传输路径;向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,所述第一指示信息用于指示所述第一中间信息,以使所述参考节点根据所述第一指示信息指示的第一中间信息测量第二定位信息。
33.可选地,这里的第一传输路径在预编码子矩阵中对应的dft基向量可以为:与第一传输路径关联,能够将第一传输路径上的第一定位测量参考信号投影到时延域,或者投影到时延域和角度域上的投影向量。
34.应理解,本技术实施例中的预编码矩阵可以是待定位节点在基础频域或者基础空域和频域向量集合中选择的频域dft向量或空域和频域dft向量组成的矩阵。
35.结合第三方面,在第三方面的某些实现方式中,所述第一指示信息用于指示所述第一中间信息,包括:所述第一指示信息包括与所述第一传输路径在所述预编码子矩阵中对应的dft基向量的标识信息。
36.结合第三方面,在第三方面的某些实现方式中,所述第一指示信息包括所述第一传输路径在所述预编码子矩阵中对应的dft基向量的标识信息,包括:所述第一指示信息包括所述dft基向量的索引信息。
37.结合第三方面,在第三方面的某些实现方式中,所述预编码子矩阵为频域dft组成的子矩阵;或者,所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
38.结合第三方面,在第三方面的某些实现方式中,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述方法还包括:根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
39.结合第三方面,在第三方面的某些实现方式中,根据第一传输路径上的所述第一定位测量参考信号,获取第一定位信息,包括:记录所述第一定位测量参考信号的到达时刻t2;测量所述第一定位测量参考信号的到达角aoa1。
40.结合第三方面,在第三方面的某些实现方式中,所述方法还包括:记录所述第二定位测量参考信号的发送时刻t3;和/或,测量所述第二定位测量参考信号的发射角aod1。
41.结合第三方面,在第三方面的某些实现方式中,所述方法还包括:向定位服务节点发送第三定位信息,其中,所述第三定位信息包括:所述到达时刻t2、所述发送时刻t3;或者,所述发送时刻t3和所述到达时刻t2的差值t3-t2;或者,所述到达时刻t2、所述发送时刻t3、以及所述到达角aoa1和/或所述发射角aod1;或者,所述发送时刻t3和所述到达时刻t2的差值t3-t2、以及所述到达角aoa1和/或所述发射角aod1。
42.结合第三方面,在第三方面的某些实现方式中,所述第一指示信息承载于信道状态信息中。
43.结合第三方面,在第三方面的某些实现方式中,所述信道状态信息还包括但不限于:预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
44.第四方面,提供了一种多径下单锚点定位的方法,应用于参考节点,包括:发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一中间信息,所述第一中间信息包括第一传输路径在预编码子矩
阵中对应的离散傅里叶变换dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;根据所述第一指示信息,利用所述第一中间信息测量第二定位信息。
45.结合第四方面,在第四方面的某些实现方式中,所述第一指示信息用于指示所述第一中间信息,包括:所述第一指示信息包括与所述第一传输路径在所述预编码子矩阵中对应的dft基向量的表示信息。
46.结合第四方面,在第四方面的某些实现方式中,所述第一指示信息包括与所述第一传输路径在所述预编码子矩阵中对应的dft基向量的表示信息,包括:所述第一指示信息包括所述dft基向量的索引信息。
47.结合第四方面,在第四方面的某些实现方式中,所述预编码子矩阵为频域离散傅里叶变换dft基向量组成的子矩阵;或者,所述预编码子矩阵为空域和频域二维离散傅里叶变换dft基向量组成的子矩阵。
48.结合第四方面,在第四方面的某些实现方式中,所述第一传输路径为经过所述dft投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
49.结合第四方面,在第四方面的某些实现方式中,所述根据所述第一测量信息,测量第二定位信息,包括:记录所述第二定位测量参考信号的到达时刻t4;测量所述第二定位测量参考信号的到达角aoa2。
50.结合第四方面,在第四方面的某些实现方式中,所述方法还包括:记录所述第一定位测量参考信号的发送时刻t1;和/或,测量所述第一定位测量参考信号的发射角aod2。
51.结合第四方面,在第四方面的某些实现方式中,所述方法还包括:向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
52.结合第四方面,在第四方面的某些实现方式中,所述第一指示信息承载于信道状态信息中。
53.结合第四方面,在第四方面的某些实现方式中,所述信道状态信息还包括但不限于:预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
54.第五方面,提供了一种多径下单锚点定位的方法,应用于定位服务节点,包括:接收到定位节点发送的第三定位信息,以及参考节点发送的第四定位信息,其中,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于第一传输路径获得的定位信息,或者,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于相同的第一中间信息获得的定位信息,所述第一中间信息包括dft基向量;根据所述第三定位信息和所述第四定位信息,对所述待定位节点进行定位。
55.结合第五方面,在第五方面的某些实现方式中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,所述第一时间信息包括:第一定位测量参考信号的到达时刻t2和第二定位测量参考信号的发送时刻t3;或
者,第二定位测量参考信号的发送时刻t3和第一定位测量参考信号的到达时刻t2的差值t3-t2;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
56.结合第五方面,在第五方面的某些实现方式中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,所述第二时间信息包括:第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1;或者,第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1的差值t4-t1;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
57.结合第五方面,在第五方面的某些实现方式中,所述根据所述第三定位信息和所述第四定位信息,获取所述待定位节点的定位信息,包括:根据所述第一时间信息和第二时间信息,确定往返时间;根据所述往返时间和所述第一角度信息中的aoa1与第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aod1与第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aod1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息。
58.第六方面,提供了一种通信装置,包括至少一个处理器、通信接口和存储器,所述通信接口用于所述通信装置与其它通信装置进行信息交互,所述存储器存储有计算机程序指令,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如上述第一方面至第五方面中任一实现方式所述的方法在如下任一节点上的功能得以实现:所述待定位节点、所述参考节点、所述定位服务节点。
59.第七方面,提供了一种计算机程序可读存储介质,所述计算机程序存储介质具有程序指令,当所述程序指令被直接或者间接执行时,使得如上述第一方面至第五方面中任一实现方式所述的方法在如下任一节点上的功能得以实现:所述待定位节点、所述参考节点、所述定位服务节点。
60.第八方面,提供了一种芯片系统,所述芯片系统包括至少一个处理器,当程序指令在所述至少一个处理器中执行时,使得如上述第一方面至第五方面中任一实现方式所述的方法在如下任一装置上的功能得以实现:所述待定位节点、所述参考节点、所述定位服务节点。
61.第九方面,提供了一种计算机程序,当所述计算机程序在至少一个处理器中执行时,使得如上述第一方面至第五方面中任一实现方式所述的方法在如下任一节点上的功能
assistant,pad)、具有无线通信功能的手持设备、计算设备或连接到无线调制解调器的其它处理设备、车载设备、可穿戴设备,5g蜂窝网络中的终端设备或者公用陆地移动通信网络(public land mobile network,plmn)中的终端设备。从产品形态上来看,本技术实施例中的待定位节点可以为支持nr空口的设备,特别是终端设备,如手机、电脑、平板、手环、智能手表、数据卡、传感器等设备。本技术实施例以待定位节点是ue为例进行说明,但本技术对此并不进行限定。
78.本技术实施例中的参考节点可以作为定位锚点对ue进行定位。从功能角度来看,参考节点为一种具有控制功能、能够配置定位测量资源并且具有支持nr连接的设备;该参考节点具有多天线能力(天线数量大于或等于3)。从产品形态来看,本技术的参考节点例如可以是5g移动通信系统中的下一代基站节点(next generation node base,gnb),其可以是宏基站或者微基站;参考节点还可以是热点(pico)、家庭基站(femeto)、传输点(transmission point,tp)、中继(relay)等。本技术实施例以参考节点是gnb为例进行说明,但本技术对此不做限定。
79.本技术实施例中的定位服务节点可以是核心网装置,如定位服务器(location service,lcs),包括定位管理功能(location management function,lmf)实体等,用于基于待定位节点上报的数据以及参考节点上报的定位信息进行定位估计。
80.随着智能化的发展,越来越多的场景需要依托于精确的定位。第三代合作伙伴计划(3rd generation partnership project,3gpp)标准《ts 22.804positioning service performance requirement in vertical domain》定义了8类定位场景,其定位需求包括绝对定位和相对定位需求,定位精度需求涵盖了从5米到20厘米,并且对可靠性也提出了90%-99.9%的需求。在3gpp ran#86会议中的rel-17 nr positioning的研究阶段(study item,si)中,制定的目标为:在通用商用场景下,定位精度满足亚米级定位精度,定位时延为100ms;而在工业互联网(industrial internet of things,iiot),定位精度需要达到20cm,定位时延需要达到10ms的要求。基于这种要求,3gpp标准正在积极推行标准化工作,包括基于3gpp蜂窝网络的无线定位技术(radio access technology(rat)dependent positioning)、基于卫星定位的定位技术(global navigation satellite system,gnss)、基于非3gpp地面网络定位技术,比如:无线保真(wireless fidelity,wi-fi)定位、蓝牙定位、地面信标系统(terrestrial beacon system,tbs)定位、超宽带(ultra wideband,uwb)定位,以及混合定位技术等。
81.不管是哪种定位技术,多径干扰、时钟同步误差和需要丰富的定位锚点(3个及以上锚点)都可能成为限制定位精度的关键因素。其中,定位过程中的同步误差包括基站/卫星/接入点(acess point,ap)等多锚点之间的同步误差,也包括锚点(基站/卫星/ap等)与待定位用户设备(user equipment,ue)之间的同步误差。而其中,观测时间差值(observed time difference of arrival,otdoa)技术通过ue测量不同锚点的到达观测时间差能够有效解决定位锚点与定位ue的同步偏差问题,但要求锚点之间必须严格同步,否则定位精度很差;而多往返时间(multi-round trip time,multi-rtt)通过发送和接收信号来估计ue与多个锚点之间的rtt,并采用三边定位算法来估计ue的位置,其中,使用rtt估计锚点和ue之间的距离定位的好处是不需要考虑锚点之间的同步误差,然而缺点是需要使用额外的定位测量参考信号,从而增加了资源开销。
82.另外,由于现有的大部分定位技术都是基于三边定位算法或三角定位算法来进行位置估计的,这就要求相关的锚点数为3个及以上,这就可能导致部署成本的增加和频率效率约束下的锚点不足。以蜂窝定位为例,多锚点定位存在的两大限制约束因素为:(1)基站部署时考虑的小区频谱最大化(控制同频干扰),因此存在大量区域只能看到1-2个小区;(2)基站位置(天线位置)的不确定性。因此,如果能够实现单锚点/单站定位,这对蜂窝定位的易用性和成本来说是非常有利的。
83.除此之外,多径效应和信号遮挡是影响到达时间(time of arrival,toa)/到达时间差(time difference of arrival,tdoa)测量精度的主要因素。虽然随着无线定位系统的带宽越宽,其时域的时间分辨率越高,对多径信号相关处理后的分辨率越高,但由多径所带来的定位误差问题仍然不可避免。信号传播过程中受到多径影响,会导致接收机不能区分视距(los)和非视距(nlos),处理时相关峰值发生偏移,使toa估计出现误差;或者,信号传播过程中由于直射路径被遮挡,接收机收到反射、折射、绕射的无线信号,这同样会导致toa的测量出现偏差;又或者,由于直射径信号弱导致相关处理的结果低于门限而不可用,无法得到准确的toa数据。
84.为了消除多径效应对定位的影响,相关的技术有:(1)提高系统的灵敏度和动态范围,由于动态范围大的射频前端对噪声干扰的容忍性更大,会使多径误差减小。但这种方法对设备硬件的要求比较高。(2)对信道的los径和nlos径进行鉴别,在定位计算时进行加权处理。但这种方式要求接收端能够准确的分辨los/nlos径。(3)直接对有nlos径引起的定位误差进行修正。但这种方法需要知道障碍物反射、折射、绕射信号的角度,采用光学原理和平面几何法将nlos传播路径转化为等效的los传播。
85.为了消除多径效应对定位的影响以及解决多锚点定位资源不足的问题,业界提出了单锚点定位技术,即只需要一个锚点就可实现ue定位,而不需要多个锚点同时参与定位,从而消除了锚点间同步误差和锚点资源不足的问题,同时也可以降低网络部署的成本。其中即时定位与地图构建(simultaneously localization and mapping,slam)是一种研究较为广泛的单锚点定位技术,待定位目标在自身位置不确定环境位置的条件下通过创建地图,并且利用地图进行自主定位和导航。slam的好处是单个节点可以计算相对位置本身以及反射器的位置,而不需要在otdoa定位中执行多个节点之间的协调,从而实现单锚点定位。另外也有研究者提出利用los径和反射径的到达角(angle of arrival,aoa)和toa来估计ue位置,通过多径信息辅助单锚点定位。另外,同时位置估计和反射估计(simultaneously position and reflector estimation,spre)也是一种较为典型的单锚点定位方法。利用spre算法,ue位置和反射器位置的估计可以分为以下三个步骤:1、首先利用los路径的测量aoa(angle of arrival,到达角度)和toa获取ue的粗略位置信息;2、基于估计的粗略位置来估计反射器的位置,并利用平均滤波方法对它们进行细化;3、基于细化的反射器位置更新ue当前位置估计。
86.基于多径辅助单锚点定位方法中,能够实现高精度定位的前提包括:1、接收端和发送端能够分辨los径和nlos径,并且基于分辨出的los径来进行toa测量或rtt测量;2、接收端和发送端至少需要有一端具备多天线能力(≥3天线),从而可进行aoa或发射角(angle of departure,aod)估计,并联合los径上的toa进行混合定位。但实际系统中,在进行多径识别中,传统的多信号分类算法(multiple signal classification,music)和旋转不变子
空间算法(estimation of signal parameters via rotation invariant technique,esprit)由于存在噪声问题以及发送端和接收端的带宽问题,会导致非理想宽窄波束影响aoa/aod估计精度。另外,基于几何定位算法的距离度量中,通常采用信号传输时延最小的首达径作为锚点到待测对象的距离表征,但实际场景中由于某些原因导致los径被遮挡,会造成将nlos径估计成了los径,从而导致定位估计误差较大。
87.在理想的多径环境中,不考虑传输路径中遮挡物等因素的影响,首达径一般就是直射径,其对应的信号传输时延最小(toa最小),信号强度最高,如果用该首达径测量定位的角度信息和定位信息,获得的定位信息也最为准确。
88.然而,在实际的多径环境中,由于遮挡物的影响,首达径的信号在传输过程中发生较大衰减,使得首达径的信号强度未必最强,此时首达径和信号最强径(以下简称最强径)为两条不同的径。示例性的,如图1所示,为首达径和最强径分别对应的角度信息和距离信息的示意图。其中,θ1为首达径的aod,为首达径的aoa,r1为toa对应的距离信息。θ2为信号衰减最小的最强径的aod,为最强径的aoa,对应最强径中发射端与反射体的距离,对应最强径中反射体与接收端的距离信息。
89.应理解,由于信号强度越强,对应的角度估计误差越小,因而能够基于最强径获得更准确的角度信息;而toa越小,越接近直射径,因此能够基于首达径获取更准确的距离信息。又因为如背景技术所说,在多径定位环境下,如果无法保证锚点和ue之间测距信息和角度信息的一致性,就无法保证单锚点定位的精度,因此在多径场景下的单锚点定位中,为了获取更为准确的定位信息,需要保持定位测量过程中距离信息测量和角度信息测量的一致性,即基于同一条径进行测距和测角。这就需要在首达径和最强径之间进行选择,权衡准确的距离信息测量和准确的角度信息测量,实现精确的定位。
90.为满足上述需求,本技术实施例提供了一种多径下单锚点定位的方法,通过待定位节点向参考节点指示其测量的定位信息对应哪一条径,使参考节点和待定位节点也基于同一条径测量定位信息,从而保证距离信息和角度信息的一致性,实现高精度定位。
91.示例性的,如图2所示,示出了本技术实施例提供的一种多径下单锚点定位的系统架构的示意图。
92.在一些实施例中,参考节点可以为定位过程中的定位锚点,能够向目标节点发送下行定位测量参考信号,如:定位参考信号(positioning reference signal,prs)、信道状态信息参考信号(channel state information reference signal,csi-rs)、时频域跟踪参考信号(time/frequency tracking signal,trs)等。
93.在一些实施例中,待定位节点可以发送上行定位测量参考信号,例如:探测参考信号(sounding reference signal,srs)等。该待定位节点还可以支持nr传输能力。
94.在一些实施例中,系统架构中还可以包括定位服务节点,该定位服务节点可以根据待定位节点的请求,发起单锚点定位流程,并且根据待定位节点和参考节点上报的定位信息,对待定位节点进行定位。其中,在本技术实施例中,定位服务节点可以为定位服务器中的lmf实体。
95.为便于理解,在图2示出的系统架构中,待定位节点为用户设备,参考节点为基站。此外,本技术实施例提供的多径下单锚点定位的方法,可以应用于终端设备定位的多种场景中。比如在室外场景下,用户对自己的位置进行定位等,本技术对此不作限定。
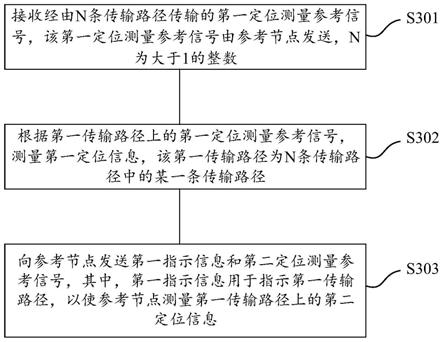
96.示例性的,如图3所示,为本技术实施例提供的一种多径下单锚点定位的方法的示意性流程图。该方法可以应用于上述图2中示出的系统架构中,可以包括以下步骤,其中,各步骤可以由待定位节点来执行:
97.s301,接收经由n条传输路径传输的第一定位测量参考信号,该第一定位测量参考信号由参考节点发送,n为大于1的整数。
98.在一些实施例中,参考节点发送定位测量参考信号。定位测量参考信号可以包括但不限于:prs、csi-rs、trs中的一种或多种。
99.应理解,由于实际环境中存在大气层对电波的散射、电离层对电波的反射和折射,以及山峦、建筑等地表物体对电波的反射,会造成信号的多径传播。这里的n条传输路径,是指多径传播环境下的多条传输路径。参考节点发送的定位测量参考信号可以通过该n条传输路径分别传输至待定位节点。
100.在一些实施例中,n条输出路径包括首达径和最强径。其中,首达径是指定位测量参考信号时延最小的传输径;最强径是指定位测量参考信号衰减最小的径,换言之,是定位测量参考信号的信号功率最强的径。
101.在一些实施例中,参考节点在发送第一定位测量参考信号时,记录该第一定位测量参考信号的发送时刻t1。可选地,发送时刻t1对应第一定位测量参考信号由参考节点的发送天线发出的时刻。
102.在一些实施例中,参考节点还可以向待定位节点发送时频域指示信息,指示待定位节点在指定的时频域上接收第一定位测量参考信号。
103.在一些实施例中,待定位节点在指定的时频域上接收参考节点发送的第一定位测量参考信号。同时,待定位节点记录第一定位测量参考信号的到达时刻t2。可选地,到达时刻t2对应第一定位测量参考信号到达待定位节点接收天线的时刻。
104.示例性的,待定位节点可以分别记录每条传输路径上的第一定位测量参考信号的到达时刻;或者,待定位节点可以至少记录首达径和最强径上的第一定位测量参考信号的到达时刻。
105.s302,根据第一传输路径上的第一定位测量参考信号,测量第一定位信息,该第一传输路径为n条传输路径中的某一条传输路径。
106.其中,第一传输路径为n条传输路径中的任意一条传输路径。可选地,第一传输路径为首达径;或者,第一传输路径为最强径;或者,第一传输路径可以既是首达径也是最强径。
107.在一些实施例中,第一定位信息包括但不限于:第一定位测量参考信号的到达时刻t2、第一定位测量参考信号的到达角aoa1、第一定位测量参考信号的参考信号接收功率(reference signal receiving power,rsrp)。
108.s303,向参考节点发送第一指示信息和第二定位测量参考信号,其中,第一指示信息用于指示第一传输路径,以使参考节点测量第一传输路径上的第二定位信息。
109.在一些实施例中,第二定位测量参考信号为上行测量参考信号,可以包括但不限于:srs。
110.在一些实施例中,该第一指示信息例如可以为多径指示信息(channel multipath indicator,cmpi)。该第一指示信息可以承载于信道状态信息报告(csi reporting)中。
111.示例性的,当待定位节点的天线能力较强(如天线数量大于或等于3),以及处理能力(如计算能力)较强,使得待定位节点有多径分辨能力时,则该第一指示信息可以为第一传输路径的指示信息,用于测量的第一测量定位信息对应的传输径。
112.应理解,通过向参考节点发送第一指示信息,可以使参考节点基于相同的传输径测量定位信息,保证了参考节点和待定位节点测量的定位信息为同一条传输径上的定位信息,提高了定位信息的准确性,从而提升定位精度。
113.在一些实施例中,待定位节点还可以获取该第二定位测量参考信号的发射角aod1。
114.在一些实施例中,待定位节点可以向定位服务节点上报第三定位信息,其中,该第三定位信息用于定位服务节点对待定位节点进行定位。示例性的,第三定位信息包括第一时间信息;或者,第三定位信息包括第一时间信息和第一角度信息。其中,第一时间信息包括第一定位测量参考信号的到达时刻t2和第二定位测量参考信号的发送时刻t3;或者,所述第一时间信息包括第二定位测量参考信号的发送时刻t3和第一定位测量参考信号的到达时刻t2的差值t3-t2。所述第一角度信息可以包括第一定位测量参考信号的到达角aoa1;和/或,第二定位测量参考信号的发射角aod1。
115.在一些实施例中,参考节点接收待定位节点发送的第一指示信息和第二测量参考信号,其中,第一指示信息和第二定位测量参考信号可以是同时发送的,或者是不同时发送的,当第一指示信息和第二定位测量参考信号为不同时发送的时,本技术对两者的发送时间顺序不作限定。示例性的,参考节点可以接收待定位节点发送的csi-reporting,根据其中包括的cmpi指示信息获知待定位节点测量的第一定位信息所对应的传输路径。
116.在一些实施例中,参考节点基于对第一传输路径的指示信息,测量该第一传输路径对应的第二定位信息。
117.其中,第二定位信息包括:第二定位测量参考信号的到达时刻t3、第二定位测量参考信号的到达角aoa2。
118.在一些实施例中,参考节点在指定的时频域上接收待定位节点发送的第二定位测量参考信号,同时参考节点记录该第二定位测量参考信号的到达时刻t4。可选地,达到时刻t4对应第二定位测量参考信号到达参考节点接收天线的时刻。
119.示例性的,参考节点可以分别记录每条传输径上的第二定位测量参考信号的到达时刻;或者,参考节点可以至少记录首达径和最强径上的第二定位测量参考信号的到达时刻。
120.在一些实施例中,参考节点向定位服务节点上报第四定位信息,其中,该第四定位信息用于定位服务节点对待定位节点进行定位。示例性的,第四定位信息包括第二时间信息;或者,第四定位信息包括第二时间信息和第二角度信息。其中,第二时间信息包括第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1;或者,第二时间信息包括第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1的差值t4-t1。第一角度信息包括第一定位测量参考信号的反射角aoa2;和/或,第二定位测量参考信号的到达角aod2。
121.根据本技术实施例提供的多径下单锚点定位的方法,通过向参考节点发送待定位节点测量的定位信息所对应的传输径的指示信息,可以使参考节点基于相同的传输径测量
定位信息,保证了参考节点和待定位节点测量的定位信息为同一条传输径上的定位信息,提高了定位信息的准确性以及定位精度。
122.示例性的,图4示出了本技术实施例提供的另一种多径下单锚点定位的示意性流程图。该方法可以应用于上述图2中示出的系统架构中,可以包括以下步骤,其中,各步骤可以由待定位节点来执行:
123.s401,接收经由n条传输路径传输的第一定位测量参考信号,该第一定位测量参考信号由参考节点发送,n为大于1的整数。
124.s402,根据第一中间信息测量第一定位信息,该第一中间信息包括第一传输路径在预编码子矩阵中对应的离散傅里叶变换dft基向量,该第一传输路径属于所述n条传输路径中的某一条传输路径。
125.s403,向参考节点发送第一指示信息和第二定位测量参考信号,其中,第一指示信息用于指示第一中间信息,以使参考节点根据第一指示信息指示的第一中间信息测量第二定位信息。
126.应理解,区别于图3示出的多径下单锚点定位的方法,图4示出的方法可以适用于待定位节点在无法分辨多径时的场景下,例如,待定位节点的天线能力较弱(如天线数量小于3)或者处理能力(如计算能力)较弱时,无法直接使用超分辨率算法或多信号分类算法直接对信号进行多径分辨。为避免重复,以下仅针对图4实施例与图3实施例不同之处进行介绍。
127.经过上述分析可知,当待定位节点无法分辨多径时,其无法直接向参考节点指示选择哪条传输路径测量定位信息。此时,待定位节点自身也无法直接根据某一条传输路径测量定位信息。因此,在这种情形下,待定位节点可以根据某一离散傅里叶变换(discrete fourier transform,dft)基向量对应的测量信息,测量第一定位信息,并指示参考节点基于相同的测量信息测量第二定位信息,从而使得第一定位信息和第二定位信息在相同的预编码子矩阵的dft基向量下完成测量。实现在多径环境下,保证定位精度。
128.其中,本技术示例中的dft基向量也可以称为dft波束。
129.在一些实施例中,在步骤s402中,第一中间信息可以包括第一传输路径在预编码子矩阵中对应的dft基向量。其中,预编码子矩阵为投影第一传输路径的dft基向量组成的预编码子矩阵。应理解,本技术实施例中的预编码矩阵可以是待定位节点在基础频域或者基础空域和频域向量集合中选择的频域dft向量,或者空域和频域dft向量组成的矩阵。
130.还应理解,本技术实施例中的第一传输路径在预编码子矩阵中对应的dft基向量可以为:与第一传输路径关联,能够将第一传输路径上的第一定位测量参考信号投影到时延域,或者投影到时延域和角度域上的投影向量。也就是说,第一传输路径上的第一定位测量信号可以通过频域dft基向量投影到时延域,或者将第一传输路径上的第一定位测量信号可以利用频域和空域二维dft基向量分别投影到时延域和角度域。
131.在一些实施例中,在步骤s403中,第一指示信息可以用于指示第一中间信息,比如,第一指示信息可以用于指示第一传输路径对应的dft基向量。
132.示例性的,第一指示信息可以包括dft基向量的标识信息;或者,第一指示信息可以包括dft基向量的索引信息。例如,频域离散傅里叶变换dft基向量的索引信息,或者空域和频域二维离散傅里叶变换dft基向量的索引信息。
133.根据本技术实施例提供的多径下单锚点定位的方法,通过向参考节点发送第一指示信息,可以使参考节点基于相同的预编码子矩阵中的dft基向量测量定位信息,保证了参考节点和待定位节点测量的定位信息为同一dft基向量投影下的传输路径对应的定位信息,提高了定位信息的准确性,从而提升定位精度。
134.示例性的,图5示出了本技术实施例提供的一种多径下单锚点定位过程中,待定位节点、参考节点以及定位服务节点之间的交互流程示意图。
135.其中,为便于理解将本技术实施例提供的多径下的单锚点定位过程具体分为两个阶段,其中,阶段一位定位测量前的信息配置阶段,阶段二是定位信息的测量和上报阶段。
136.示例性的,阶段一包括以下步骤:
137.s501,待定位节点向定位服务节点发送定位请求。
138.其中,待定位节点可以向定位服务节点发送定位请求消息,用于向定位服务节点请求定位。
139.s502,定位服务节点向待定位节点发送定位请求应答信息。
140.其中,定位服务节点(如定位服务器lcs中的定位管理功能lmf)接收到定位请求后,开始发起单锚点或单基站蜂窝定位流程。
141.在一些实施例中,定位服务节点在确定单锚点定位后,可以请求查询待定位节点的定位能力。具体地,定位服务节点可以向待定位节点发送定位能力请求信息,该定位能力请求信息可以包括在定位请求应答消息中。
142.在一些实施例中,定位服务节点还可以请求查询参考节点的定位能力。具体地,定位服务节点可以向待定位节点发送定位能力请求信息。
143.这里的定位能力可以包括天线能力,例如天线的数量等。应理解,当参考节点的天线能力较强,如天线数量大于或等于3时,可以基于接收的定位测量参考信号获取更准确角度信息;同样地,如果待定位节点的天线能力较强,则可以获取更准确的角度信息,提升定位信息准确性。
144.s503(a),待定位节点向定位服务节点发送定位能力。
145.示例性的,待定位节点响应于定位服务节点的定位能力请求,向定位服务节点反馈该待定位节点的定位能力。
146.s503(b),参考节点向定位服务节点发送定位能力。
147.示例性的,参考节点响应于定位服务节点的定位能力请求,向定位服务节点反馈该参考节点的定位能力。
148.在一些实施例中,定位服务节点可以根据待定位节点和参考节点分别上报的定位能力,选择合适的单锚点定位方法。比如,当待定位节点和参考节点的天线能力均较强(天线数量大于或等于3)时,确定采用rtt+aod混合定位方法,或者rtt+aoa混合定位方法,或者toa+aod混合定位方法,或者toa+aoa混合定位方法等;当参考节点的定位能力较强,而待定位节点的定位能力较弱时,则可以采用rtt+参考节点计算的aoa/aod混合定位方法,或者toa+参考节点计算的aoa/aod混合定位方法等。
149.s504,定位服务节点向待定位节点发送定位辅助信息。
150.其中,定位服务节点可以通过lte定位协议(lte positioning protocol,lpp)向待定位节点发送定位辅助数据。
151.示例性的,定位服务节点向待定位节点发送的定位辅助信息可以包括下行定位测量参考信号配置信息与上行定位测量参考信号配置信息。其中,下行定位测量参考信号包括:prs、csi-rs、trs等;上行定位测量参考信号包括srs。
152.s505(a),定位服务节点向参考节点发送定位测量请求。
153.s505(b),定位服务节点向待定位节点发送定位测量请求。
154.应理解,定位服务节点向参考节点和待定位节点发送的定位测量请求的顺序可以不限于图5中示出的顺序,比如,定位服务节点可以先向待定位节点发送定位测量请求,再向参考节点发送定位测量请求;或者,定位服务器可以同时向待定位节点和参考节点发送定位测量请求,本技术对此不作限定。
155.待定位节点和参考节点接收到定位服务节点的定位测量信号后,可以进行定位信息的测量以及上报(即图5中的阶段二),具体包括以下步骤:
156.s506,参考节点向待定位节点第一定位测量参考信号。
157.其中,第一定位测量参考信号包括但不限于:prs、csi-rs、trs。
158.在一些实施例中,参考节点在向待定位节点发送第一定位测量参考信号之前,可以先向待定位节点发送时频资源的指示信息,使得待定位节点在指定的时频资源上接收第一定位测量参考信号。
159.在一些实施例中,参考节点在发送第一定位测量参考信号时,记录该第一定位测量参考信号的发送时刻t1。可选地,发送时刻t1对应第一定位测量参考信号由参考节点的发送天线发出的时刻。
160.应理解,第一定位测量参考信号可以经由n条传输路径传输至待定位节点,n为大于1的整数。其中,该n条传输路径可以包括首达径和最强径,首达径为信号时延最小的径,最强径为信号衰减最小的径,即信号强度最强的径。
161.在一些实施例中,首达径和最强径为同一条传输路径;在另外一些实施例中,由于遮挡物等的影响,首达径与最强径为两条不同的传输路径。
162.s507,待定位节点计算第一传输路径上的第一定位信息。
163.其中,第一传输路径为n条传输路径中的一条,例如为首达径和/或最强径。
164.在一些实施例中,待定位节点根据参考节点发送的时频域资源的指示信息,在指定的时频域资源上接收第一定位测量参考信号。
165.在一些实施例中,待定位节点可以计算第一定位测量参考信号的接收功率,获取不同传输路径上的第一定位测量参考信号的强度。
166.在一些实施例中,待定位节点可以基于一定准则选取第一传输路径计算定位信息。为保证定位信息的准确性,本技术实施例的第一传输路径可以是首达径或者最强径,或者可以既是首达径也是最强径。示例性的,当待定位节点的天线能力和计算能力较强,待定位节点可以分辨多径时,可以基于每条传输路径上的第一定位测量参考信号的到达时刻,确定最先到到达的第一定位测量参考信号对应的传输路径为首达径;待定位节点也可以根据接收到的第一定位测量参考信号的强度,确定信号功率最强的传输路径为最强径;之后,待定位节点基于一定的判断准则选择首达径或最强径计算定位信息。
167.待定位节点选择首达径和最强径的判断准则比如为:待定位节点判断首达径和最强径上的时延误差和信号强度误差,根据时延误差和信号强度误差选择对定位精度影响较
小的径计算定位信息。示例性的,由于首达径的测距信息更为准确,可以将首达径上的定位测量参考信号的达到时刻作为基准,用来判断最强径的达到时刻的偏差,从而反映测距信息的偏差;而最强径的角度信息更为准确,因此,可以将最强径上的定位测量参考信号的功率作为基准,判断首达径上的信号强度的误差,从而反映角度信息的误差。基于上述准则,当待定位节点判断角度误差大于测距误差时,如果选择首达径计算定位信息,则角度误差太大,使得定位信息误差很大,因此,可以选择最强径计算定位信息;当待定位节点判断测距信息的误差大于角度误差时,如果选择最强径计算定位信息,则距离信息的偏差太大,使得定位信息误差很大,此时,可以选择首达径计算定位信息。
168.在一些实施例中,待定位节点可以记录第一传输路径上的第一定位测量参考信号的到达时刻t2。可选地,到达时刻t2可以是第一定位测量参考信号到达待定位节点接收天线处的时刻。
169.在一些实施例中,待定位节点可以基于超分辨率算法或多信号分类算法计算第一传输路径的到达角aoa1。
170.s508,待定位节点向参考节点发送第一指示信息。
171.其中,第一指示信息用于指示第一传输路径的信息,或者,第一指示信息用于指示获取第一定位信息时所用的第一中间信息,该第一中间信息可以包括第一传输路径在预编码子矩阵中对应的dft基向量。
172.应理解,这里的第一中间信息还可以包括用于测量第一定位信息的其它信息,该第一中间信息与第一传输路径具有关联关系,使得不同节点基于第一中间信息测量的定位信息能够对应同一传输路径。
173.在一些实施例中,第一指示信息可以为多径指示信息cmpi。该第一指示信息可以承载于csi report中上报给参考节点。
174.s509,待定位节点向参考节点发送第二定位测量参考信号。
175.其中,第二定位测量参考信号包括但不限于:srs等。
176.在一些实施例中,待定位节点在向参考节点发送第二定位测量参考信号之前,可以先向参考节点发送时频资源的指示信息,使得参考节点在指定的时频资源上接收第二定位测量参考信号。
177.在一些实施例中,待定位节点在发送第二定位测量参考信号时,记录该第二定位测量参考信号的发送时刻t3。可选地,发送时刻t3对应第二定位测量参考信号由待定位节点的发送天线发出的时刻。
178.应理解,图5中示出的待定位节点向参考节点发送的第一指示信息和第二定位测量参考信号的先后顺序仅为一种示例,换句话说,图示的步骤s508和s509并不是唯一的实现方式,实际应用中还可以包括多种实现方式,比如待定位节点在指定的时频资源上先向参考节点发送第二定位测量参考信号,之后在发送第一指示信息;或者,待定位节点同时向参考节点发送第一指示信息和第二定位测量参考信号等,本技术对此不作限定。
179.s510,参考节点根据第一指示信息计算第一传输路径上的第二定位信息。
180.其中,第二定位信息包括但不限于:第二定位测量参考信号的到达时刻t4,第一传输路径的aoa2等。
181.在一些实施例中,参考节点根据第一指示信息获取待定位节点计算第一定位信息
所对应的传输路径为第一传输路径时,计算该第一传输路径上的第二定位测量参考信号的到达时刻t4,以及第一传输路径对应的aoa2等;或者,参考节点根据第一指示信息获取待定位节点计算第一定位信息所用的预编码子矩阵中的dft基向量时,根据相同的预编子矩阵中的dft基向量计算第二定位信息,从而也获取第一传输路径对应的定位信息。
182.s511,待定位节点向定位服务节点发送第三定位信息。
183.其中,第三定位信息包括待定位节点基于第一传输路径计算的定位信息,包括但不仅限于:t2、t3;或者t3-t2;或者,t2、t3、aoa1/aod1;或者t3-t2、aoa1/aod1等。
184.在一些实施例中,待定位节点可以通过lpp消息将第三定位信息上报给定位服务节点。可选地,该消息还可以包括csi-rsps。
185.应理解,步骤s511也可以发生在s507之后,示例性的,当待定位节点基于第一传输路径获取第一定位信息后,可以根据第一定位信息获取第三定位信息,并向定位服务节点上报该第三定位信息。本技术对第三定位信息的发送时间不做限定。
186.s512,参考节点向定位服务节点发送第四定位信息。
187.其中,第四定位信息包括参考节点基于第一传输路径计算的定位信息,包括但不限于:t1、t4;或者,t4-t1;或者,t1、t4,aoa2和/或aod2;或者t4-t1,aoa2和/或aod2等。
188.在一些实施例中,参考节点可以通过nrppa消息将第四定位信息上报给定位服务节点。可选地,该消息还可以包括srs-rsps。
189.在一些实施例中,定位服务节点接收到第三定位信息和第四定位信息后,可以根据待定位节点上报的测量值t3-t2(或t2,t3)、aoa1和/或aod1,以及参考节点上报的测量值t4-t1(或t1,t4)、aoa2和/或aod2确定待定位节点的定位信息。或者,定位服务节点也可以根据上报的下行定位测量参考信号的rsrp和上行定位测量参考信号的rsrp完成aod2、aoa2的测量,并完成单锚点混合定位。
190.具体地,关于时间信息,定位服务节点可以根据3gpp r16标准中的rtt方法进行计算,即rtt=-(r3-r2)+(t4-t1);关于角度信息,既可以基于参考节点发送的测量角度信息aoa2/aod2来确定,也可以基于待定位节点发送的测量的角度信息aoa1/aod1来确定。
191.可选地,当参考节点和待定位节点的天线能力都足够强时,两者均可以进行准确的角度测量,此时,为了进一步提高定位精度,可以采用aoa1和aod1的加权值(比如平均值),或者aod2和aoa2的加权值(比如平均值)作为优化的角度信息,完成混合定位。
192.在一些可能的实现方式中,定位服务节点根据第一时间信息和第二时间信息,确定往返时间rtt。然后,定位服务节点根据往返时间和第一角度信息中的aoa1与第二角度信息中的aod2,计算待定位节点的定位信息;或者,定位服务节点根据往返时间和第一角度信息中的aoa1与第二角度信息中的aoa2,计算待定位节点的定位信息;或者,定位服务节点根据往返时间和第一角度信息中的aoa1和aod1的加权值及第二角度信息中的aoa2,计算待定位节点的定位信息;或者,定位服务节点根据往返时间和第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aod2,计算待定位节点的定位信息;或者,定位服务节点根据往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2与aod2的加权值,计算待定位节点的定位信息;或者,定位服务节点根据往返时间和第一角度信息中的aoa1及第二角度信息中的aoa2与aod2的加权值,计算待定位节点的定位信息;或者,根据往返时间和第一角度信息中的aod1及第二角度信息中的aoa2与aod2的加权值,计算待定位
t1、aoa2/aod2等。
202.根据上述多径下单锚点定位的方法,通过待定位节点向参考节点指示该待定位节点测量定位信息时选择的传输路径,使参考节点能基于相同的传输路径测量定位信息,这样就能保证待定位节点和参考节点均是基于相同的传输路径完成的定位信息的测量,使得rtt、角度信息等对应同一条传输路径,降低多径干扰,从而获得更准确的定位精度。
203.针对情形二,应理解,待定位节点天线能力较弱(如天线数量小于3)或者处理能力(如计算能力)较弱时,待定位节点自身不足以分辨出n条传输路径中的每条传输路径。此时,待定位节点可以向参考节点指示测量定位信息时所用的预编码子矩阵中dft基向量;参考节点基于接收到的pmi以及dft基向量指示信息,在相同的预编码子矩阵中的相同dft基向量下完成定位信息的测量,保证了带定位节点和参考节点测量的定位信息对应同一条传输路路径,避免由多径带来的影响,提高定位信息的测量精度。
204.为更好的理解本技术实施例提供的多径下单锚点定位的方法中,待定位节点和参考节点基于相同的dft基向量测量定位信息,能够降低多径干扰的概率,从而提高定位精度,以下对相关的过程进行介绍。
205.在一些实施例中,当待定位节点接收到n条传输路径上的第一定位测量参考信号后,可以利用dft基向量,将第一定位测量参考信号投影到时延域,或时延域和角度域。例如,待定位节点将n条传输路径上的第一定位测量参考信号进行频域dft基向量投影,将其投影到时延域;或者将其进行频域dft基向量与空域dft基向量投影,将其投影到时延域与角度域。而后,待定位节点可以基于时延域确定首达径,或者基于角度域和时延域确定首达径和最强径;然后再选择首达径或者最强径测量定位信息。
206.应理解,将第一定位测量参考信号进行dft基向量投影后,传输路径和预编码子矩阵中的dft基向量就有关联关系,比如,当将第一定位测量参考信号进行频域dft基向量投影后,不同传输路径在不同的频域dft基向量上表现出不同的时延特性;或者,当将第一定位测量参考信号分别进行空域dft基向量和频域dft基向量投影后,不同传输路径在不同的频域dft基向量与空域dft基向量上体现出不同的时延特性和角度特性。
207.以上述分析为前提,假设第一传输路径投影到时延域或者投影到时延域和角度域上时,对应的投影向量为第一预编码子矩阵中的某一个dft基向量,并且待定位节点选择该dft基向量计算定位信息,那么待定位节点测得的定位信息为第一传输路径上的定位信息。因此,如果待定位节点向参考节点发送计算定位信息所用的预编码子矩阵中的dft基向量的指示信息,使参考节点也基于相同的dft基向量/波束计算定位信息,则可以保证参考节点测得的定位信息为与第一传输路径为同一dft基向量投影下的传输路径对应的定位信息,这就保证了待定位节点和参考节点计算的定位信息对应同一条传输路径,能够避免定位信息受到多径的干扰。
208.在一些实施例中,为了实现待定位节点和参考节点在相同的预编码子矩阵中的dft基向量下完成多径分辨计算,参考节点在发送下行测量参考信号时和接收上行测量参考信号时,所用的天线配置是一样的,并且下行定位测量参考信号和上行定位测量参考信号的带宽需要相同,这样就保证了待定位节点上报的预编码子矩阵与dft基向量与参考定位节点使用的预编码子矩阵与dft基向量具有相同的维度,进而保证参考节点和待定位节点在相同的传输路径下完成定位信息的测量。
209.实际应用中,具体的实现流程可以包括:参考信号在发送下行定位测量参考信号(这里以csi-rs为例)时,可以首先进行csi-rs外层权加权。假设,csi-rs信号支持p端口与q层(或流)发送,参考节点的天线数量为n
bs
(n
bs
为大于或等于3的整数),外层权的矩阵大小为n
bs
×
p,则发送出去的csi-rs的维度为n
bs
×
q;在经过信道(m
ue
为待定位节点的天线数量)传输后,待定位节点接收到维度为m
ue
×
q的接收信号,在使用维度为p
×mue
的后编码矩阵经过外层权接加权之后获得p
×
q的信号。之后,待定位节点将解外层权后的信号进行dft向量投影,从而分辨出很多的多径,而每一条径则对应一个预编码子矩阵中的一个dft基向量。应理解,这里的外层权是参考节点侧固定的一个静态矩阵(或静态权),当其它权值不适用时(如通道矫正失败,用户刚接入没有csi测量信息上报等),此时就可以采用外层权加权。每一组外层权对应一组波束。
210.而后,待定位节点在其中的一条径上进行如t2、aoa1等信息的测量,完成定位信息的测量之后,在csi report中携带多径指示信息cmpi,告知参考节点待定位节点是具体在哪个预编码子矩阵中的哪个dft基向量下进行的定位信息测量的。然后,待定位节点可以向参考节点发送上行定位测量参考信号,以srs为例。
211.参考节点在指定的时频资源上分别获取csi report以及上行定位测量参考信号srs。其中,待定位节点侧经过层映射后的srs信号的维度为p
×
q,外层权的矩阵大小为n
ue
×
p,ue的发送天线数目为n
ue
;在经过信道(m
bs
为参考节点的天线数量)传输后,参考节点接收到维度为m
bs
×
q的接收信号,在使用维度为p
×mbs
的后编码矩阵经过外层权解加权之后获得p
×
q的信号。之后,参考节点将解外层权加权后的信号进行dft向量投影,并根据csi report中的多径信息指示,使用与待定位节点相同的dft基向量完成如t4、aoa2等定位信息的测量。
212.在一些实施例中,待定位节点确定预编码矩阵w的方法可以包括:待定位节点根据网络设备(如参考节点)下发的csi-rs导频信号确定物理信道,再pmi检测算法从预定义的预编码矩阵组中确定w。对于数据传输业务,确定w的原则可以包括但不仅限于:网络设备(如参考节点)如果按照预编码矩阵w加权数据,则待定位节点接收到的数据的信噪比和/或吞吐量最大,和/或频谱效率最高等。
213.预编码矩阵w可以由w1和w2的乘积构成。其中,w1是多个dft基向量构成的块状矩阵,w1码本是宽带的、长期的,满足其中,x1由k个过采样的dft基向量/波束组成。其中,w1码本是与多径关联的码本,包括2k个dft基向量,其中,k为大于或等于1的整数,待定位节点需要将其使用的2k个dft基向量中的哪个基向量指示信息告诉定位参考节点。
214.待定位节点可以向参考节点发送pmi指示预编码矩阵。pmi包括pmi1和pmi2两部分内容,其中,pmi1用于指示预编码矩阵w1中的所有元素,pmi2用于指示w2中的所有元素。而上述情形二中描述所说的cmpi中携带预编码子矩阵w1中的基向量/波束指示信息,具体是指cmpi携带与多径关联的w1中的k个dft基向量中的具体哪一个基向量信息。
215.应理解,由于用于测量定位信息的dft基向量组成的预编码子矩阵的选取原则,是使toa1的时延最小和/或第一定位测量参考信号的rsrp最大;而用于数据传输中对数据预
编码所用的预编码子矩阵的选取原则,主要是为了使得信噪比最大,或者吞吐量最大,或者频谱效率最高等。因此,即使基于相同的参考信号与预编码子矩阵,基于不同原则选取出的估计定位信息所用的预编码子矩阵,与待定位节点向参考节点推荐的用于下行pdsch数据预编码加权的pmi码本或预编码子矩阵是不相关的,两者可能相同,也可能不同。因此,需要额外向参考节点发送第一指示信息,特意指示待定位节点估计定位信息时所用的由k个dft基向量/波束组成的预编码子矩阵中的哪一个dft基向量/波束。
216.区别于情形一中的第一指示信息用1比特来表征,情形二中的第一指示信息比特大小可以为子矩阵大小u=[log2(k)],也就是预编码子矩阵w1中的对角块矩阵x1中的k个dft基向量/波束的索引比特位数,cpmi携带用于向参考节点指示待定位节点是使用k个dft基向量/波束中的哪个基向量/波束来测量定位信息的。
[0217]
根据上述多径下单锚点定位的方法,通过待定位节点向参考节点指示该待定位节点测量定位信息时选择的预编码子矩阵中的哪个dft基向量/波束,使参考节点能基于相同的dft基向量/波束测量定位信息,由于相同的dft基向量对应相同的传输路径或者同一波束内的传输路径,这样就能保证待定位节点和参考节点均是基于相同的传输路径或同一波束内的传输路径完成的定位信息的测量,降低多径干扰,从而获得更准确的定位精度。
[0218]
此外,在情形二中的另一些实施例中,待定位节点上报的pmi指示的码本可以是空域二维的(以下称情形三)。此时,待定位节点和参考节点在进行定位信息的测量时,是基于空频dft二维基向量完成的。
[0219]
以待定位节点对定位信息测量为例,待定位节点可以将接收到csi-rs信号投影到空域dft和频域dft基向量上(等效于将信号变换到角度域和时延域),此时每一条径对应了一个空频二维dft基向量。因此,待定位节点在上报给参考节点的csi report中需要向参考节点指示待定位节点测量定位信息所用的空频二维dft基向量,从而保证参考节点和待定位节点使用相同的空频二维dft基向量计算第三定位信息。
[0220]
在情形三下,待定位节点上报的pmi指示的预编码子矩阵是空频二维的,类似于3gpp版本16(r16)中的空频预编码子矩阵,则cmpi指示的则是定位节点使用哪个《角度,时延》对对应的空频dft基向量对测量第一定位信息的。
[0221]
以3gpp r16的空频二维码本为例,预编码矩阵可以表征为:其中,w1表示空域压缩,表示频域压缩,表示线性组合系数,则其中的w1可以包含某一个空域dft基向量组成的子矩阵,可以包含一个频域dft基向量组成的子矩阵。因此cmpi指示信息中需要包含用于指示选取w1中的哪个空域dft基向量以及中的哪个频域dft基向量组成的指示比特。示例性的,指示比特大小为s=[log2(u)+log2(v)],其中u和v分别为空域dft基向量和频域dft基向量的维数/索引值大小,log2(u)和log2(v)分别为空域dft基向量和频域dft基向量的索引指示比特位数,cmpi用于向参考节点指示待定位节点是使用哪些空域dft基向量/波束与频域dft基向量/波束来测量第一定位信息的。
[0222]
根据上述多径下单锚点定位的方法,通过待定位节点向参考节点指示该待定位节点测量定位信息时选择的dft基向量,使参考节点能基于相同的dft基向量测量定位信息,由于相同的dft基向量对应相同的传输路径或者同一波束内的传输路径,这样就能保证待定位节点和参考节点均是基于相同的传输路径或同一波束内的传输路径完成的定位信息
的测量,降低多径干扰,从而获得更准确的定位精度。
[0223]
示例性的,第一指示信息在csi report中的位置可以有多种,本技术对此不作限定。如图7所示,以第一指示信息是cpmi(具体内容可以包括上述三种情形所说的内容)为例,示出了第一指示信息在csi report不同位置时的结构示意图。
[0224]
在一些实施例中,如图7中的(a)图所示,cmpi在csi report中的携带方式可以通过在csi report中的uci(uplink)part1中增加比特来携带指示信息。
[0225]
或者,如图7中的(b)图所示,cmpi在csi report中的携带方式可以通过在csi report中的uci part2中增加比特来携带cmpi指示信息。
[0226]
又或者,如图7中的(c)图所示,cmpi可以作为csi report中的新增uci part3单独放置。
[0227]
其中,图7中的csi除了包括前述所说cqi、ri、cmpi之外,其上行第一部分还包括k
nz,tot
,用于表示所有层中所有非零系数的数量;bitmaps per layer则对应所有层非零系数bitmap;最强系数指示(strongest coefficient indicator,sci);频域子矩阵选择指示(frequency domain,fd)basis subset selection indicator和空域子矩阵选择指示(spatial domain,sd)basis subset selection indicator;空域过采样因子(sd oversampling factor)。
[0228]
示例性的,如图8所示,为本技术实施例提供的一种通信节点的结构示意图。其中,通信节点800包括接收模块801,处理模块802以及发送模块803。
[0229]
在一种实现方式中,接收模块801,可以用于接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数。
[0230]
在一种实现方式中,处理模块802,可以用于根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,所述第一传输路径为所述n条传输路径中的传输路径
[0231]
在一种实现方式中,发送模块803,可以用于向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,所述第一指示信息用于指示所述第一传输路径,以使所述参考节点测量所述第一传输路径上的第二定位信息。
[0232]
在一种实现方式中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,处理模块802,还可以用于根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0233]
在一种实现方式中,处理模块802,可以用于根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,包括记录所述第一定位测量参考信号的到达时刻t2;测量所述第一定位测量参考信号的到达角aoa1。
[0234]
在一种实现方式中,处理模块802,还可以用于记录所述第二定位测量参考信号的发送时刻t3;和/或,测量所述第二定位测量参考信号的发射角aod1。
[0235]
在一种实现方式中,发送模块803,还可以用于向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;所述第一角度信息包括:
所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0236]
或者,在一种实现方式中,接收模块801,可以用于接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数。
[0237]
处理模块802,可以用于根据第一中间信息测量第一定位信息,所述第一中间信息包括与第一传输路径在预编码矩阵中对应的dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径。
[0238]
发送模块803,可以用于向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,所述第一指示信息用于指示所述第一中间信息,以使所述参考节点根据所述第一中间信息测量第二定位信息。
[0239]
在一种实现方式中,所述第一指示信息用于指示所述第一中间信息,包括:所述第一指示信息包括所述dft基向量的标识信息。
[0240]
在一种实现方式中,所述第一指示信息用于指示所述第一中间信息,包括:所述第一指示信息包括所述预编码子矩阵中的dft基向量的索引信息。
[0241]
在一种实现方式中,所述dft基向量为频域dft基向量;或者,所述dft基向量为空域和频域二维基向量。
[0242]
在一种实现方式中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述处理模块802,还可以用于根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0243]
在一种实现方式中,处理模块802,还可以用于记录所述第一定位测量参考信号的第一到达时刻t2;测量所述第一定位测量参考信号的第一到达角aoa1。
[0244]
在一种实现方式中,处理模块802,还可以用于记录所述第二定位测量参考信号的第一发送时刻t3;和/或,测量所述第二定位测量参考信号的第一发射角aod1。
[0245]
在一种实现方式中,发送模块803,还可以用于向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0246]
在一种实现方式中,所述第一指示信息承载于信道状态信息中。
[0247]
在一种实现方式中,所述信道状态信息还包括但不限于:预编码矩阵指示pmi信息、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0248]
示例性的,如图9所示,为本技术实施例提供的一种通信节点的结构示意图。该通信节点900可以是参考节点。其中,通信节点900包括发送模块901,接收模块902以及处理模块903。
[0249]
在一种实现方式中,发送模块901,可以用于发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数。
[0250]
接收模块902,可以用于接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一传输路径,所述第一传输路径为所述n条传输路径中的传输路径。
[0251]
处理模块903,可以用于根据所述第一传输路径,测量第二定位信息。
[0252]
在一种实现方式中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
[0253]
在一种实现方式中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:当所述第一传输路径为所述首达径时,所述第一指示信息为1;当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,当所述第一传输路径为所述首达径时,所述第一指示信息为0;当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0254]
在一种实现方式中,处理模块903,可以具体用于记录所述第二定位测量参考信号的到达时刻t4;测量所述第二定位测量参考信号的到达角aoa2。
[0255]
在一种实现方式中,处理模块903,可以具体用于记录所述第一定位测量参考信号的发送时刻t1;和/或,测量所述第一定位测量参考信号的发射角aod2。
[0256]
在一种实现方式中,发送模块901,还可以用于向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;所述第一角度信息包括:所述第一定位测量参考信号的反射角aoa2;和/或,所述第二定位测量参考信号的到达角aod2。
[0257]
在一种实现方式中,所述第一指示信息承载于信道状态信息中。
[0258]
在一种实现方式中,所述信道状态信息还包括但不限于:预编码矩阵指示pmi信息、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0259]
或者,在一种实现方式中,发送模块901,可以用于发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数。
[0260]
接收模块902,可以用于接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一中间信息,所述第一中间信息为第一传输路径所对应的dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径。
[0261]
处理模块903,可以用于根据所述第一测量信息,测量第二定位信息。
[0262]
在一种实现方式中,所述第一指示信息用于指示所述第一中间信息,包括:所述第一指示信息包括所述dft基向量/波束的标识信息。
[0263]
在一种实现方式中,所述第一指示信息用于指示所述第一中间信息,包括:所述第一指示信息包括所述预编码子矩阵中的dft基向量的索引信息。
[0264]
在一种实现方式中,所述dft基向量为频域dft基向量;或者,所述dft基向量为空频二维基向量。
[0265]
示例性的,如图10所示,示出了有一种通信节点的结构示意图。通信节点1000包括
接收模块1001和处理模块1002。
[0266]
在一种实现方式中,接收模块1001,可以用于接收待定位节点发送的第三定位信息,以及参考节点发送的第四定位信息,其中,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于第一传输路径获得的定位信息,或者,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于相同的第一中间信息获得的定位信息,所述第一中间信息包括dft基向量。
[0267]
在一种实现方式中,处理模块1002,可以用于根据所述第三定位信息和所述第四定位信息,对所述待定位节点进行定位。
[0268]
在一种实现方式中,处理模块1002,可以具体用于根据所述第一时间信息和第二时间信息,确定往返时间;根据所述往返时间和所述第一角度信息中的aoa1与第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aod1与第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aod1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息。
[0269]
图11示出了本技术实施例提供的一种通信装置的示意性结构图。该通信装置1100包括至少一个处理器1101、通信接口1102以及存储器1103,所述通信接口用于所述通信装置与其它通信装置进行信息交互,所述存储器存储有计算机程序指令,当程序指令在所述至少一个处理器中执行时,使得所述通信装置实现上文所述所述的定位方式的触发方法在如下任一节点上的功能得以实现:所述源节点、所述目标节点。
[0270]
其中,处理器1101,通信接口1102和存储器1103通过总线1104互相连接。其中,总线1104可以是pci总线或eisa总线等。总线1104可以分为地址总线、数据总线、控制总线等。为便于表示,图11中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
[0271]
本技术实施例还提供了一种非易失性存储介质,该非易失性存储介质中存储有一个或多个程序代码,当通信装置1100的处理器1101执行该程序代码时,通信装置1100执行上文所述所述的定位方式的触发方法在如下任一节点上的功能得以实现:所述源节点、所述目标节点。
[0272]
其中,本技术实施例提供的通信装置1100中各个单元或模块的详细描述以及各个单元执行本技术任一方法实施例中源节点或目标节点执行的相关方法步骤后所带来的技术效果可以参考本技术方法实施例中的相关描述,此处不再赘述。
[0273]
结合上文内容,本技术还提供如下实施例:
[0274]
实施例1,一种多径下单锚点定位的方法,其中,应用于待定位节点,包括:
[0275]
接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;
[0276]
根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,所述第一传输路径为所述n条传输路径中的某一条传输路径;
[0277]
向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,
[0278]
所述第一指示信息用于指示所述第一传输路径,以使所述参考节点测量所述第一传输路径上的第二定位信息。
[0279]
实施例2,根据实施例1所述的方法,其中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述方法还包括:
[0280]
根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0281]
实施例3,根据实施例2所述的方法,其中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:
[0282]
当所述第一传输路径为所述首达径时,所述第一指示信息为1;
[0283]
当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,
[0284]
当所述第一传输路径为所述首达径时,所述第一指示信息为0;
[0285]
当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0286]
实施例4,根据实施例1-3中任一实施例所述的方法,其中,根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,包括:
[0287]
记录所述第一定位测量参考信号的到达时刻t2;
[0288]
测量所述第一定位测量参考信号的到达角aoa1。
[0289]
实施例5,根据实施例4所述的方法,其中,所述方法还包括:
[0290]
记录所述第二定位测量参考信号的发送时刻t3;和/或,
[0291]
测量所述第二定位测量参考信号的发射角aod1。
[0292]
实施例6,根据实施例5所述的方法,其中,所述方法还包括:
[0293]
向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0294]
所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;
[0295]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0296]
实施例7,根据实施例1-6中任一实施例所述的方法,其中,所述第一指示信息承载于信道状态信息中。
[0297]
实施例8,根据实施例7所述的方法,其中,所述信道状态信息还包括但不限于:
[0298]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0299]
实施例9,一种多径下单锚点定位的方法,其中,应用于参考节点,包括:
[0300]
发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0301]
接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指
示信息用于指示第一传输路径,所述第一传输路径为所述n条传输路径中的某一条传输路径;
[0302]
根据所述第一指示信息,在所述第一传输路径上测量第二定位信息。
[0303]
实施例10,根据实施例9所述的方法,其中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
[0304]
实施例11,根据实施例10所述的方法,其中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:
[0305]
当所述第一传输路径为所述首达径时,所述第一指示信息为1;
[0306]
当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,
[0307]
当所述第一传输路径为所述首达径时,所述第一指示信息为0;
[0308]
当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0309]
实施例12,根据实施例9-11中任一实施例所述的方法,其中,所述根据所述第一指示信息,在所述第一传输路径上测量第二定位信息,包括:
[0310]
记录所述第二定位测量参考信号的到达时刻t4;
[0311]
测量所述第二定位测量参考信号的到达角aoa2。
[0312]
实施例13,根据实施例12所述的方法,其中,所述方法还包括:
[0313]
记录所述第一定位测量参考信号的发送时刻t1;和/或,
[0314]
测量所述第一定位测量参考信号的发射角aod2。
[0315]
实施例14,根据实施例13所述的方法,其中,所述方法还包括:
[0316]
向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0317]
所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;
[0318]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0319]
实施例15,根据实施例9-14中任一实施例所述的方法,其中,所述第一指示信息承载于信道状态信息中。
[0320]
实施例16,根据实施例15所述的方法,其中,所述信道状态信息还包括但不限于:
[0321]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0322]
实施例17,一种多径下单锚点定位的方法,其中,应用于待定位节点,包括:
[0323]
接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;
[0324]
根据第一中间信息测量第一定位信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的离散傅里叶变换dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;
[0325]
向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,
[0326]
所述第一指示信息用于指示所述第一中间信息,以使所述参考节点根据所述第一
指示信息指示的所述第一中间信息测量第二定位信息。
[0327]
实施例18,根据实施例17所述的方法,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0328]
所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息。
[0329]
实施例19,根据实施例18所述的方法,其中,所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息,包括:
[0330]
所述第一指示信息包括所述dft基向量的索引信息。
[0331]
实施例20,根据实施例18或19所述的方法,其中,所述预编码子矩阵为频域dft基向量组成的子矩阵;或者,
[0332]
所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
[0333]
实施例21,根据实施例17-20中任一实施例所述的方法,其中,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述方法还包括:
[0334]
根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0335]
实施例22,根据实施例17-21中任一实施例所述的方法,其中,根据第一传输路径上的所述第一定位测量参考信号,获取第一定位信息,包括:
[0336]
记录所述第一定位测量参考信号的到达时刻t2;
[0337]
测量所述第一定位测量参考信号的到达角aoa1。
[0338]
实施例23,根据实施例22所述的方法,其中,所述方法还包括:
[0339]
记录所述第二定位测量参考信号的发送时刻t3;和/或,
[0340]
测量所述第二定位测量参考信号的发射角aod1。
[0341]
实施例24,根据实施例23所述的方法,其中,所述方法还包括:
[0342]
向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0343]
所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;
[0344]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0345]
实施例25,根据实施例17-24中任一实施例所述的方法,其中,所述第一指示信息承载于信道状态信息中。
[0346]
实施例26,根据实施例25所述的方法,其中,所述信道状态信息还包括但不限于:
[0347]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0348]
实施例27,一种多径下单锚点定位的方法,其中,应用于参考节点,包括:
[0349]
发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0350]
接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一中间信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;
[0351]
根据所述第一指示信息,利用所述第一中间信息测量第二定位信息。
[0352]
实施例28,根据实施例27所述的方法,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0353]
所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息。
[0354]
实施例29,根据实施例27或28所述的方法,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0355]
所述第一指示信息包括所述dft基向量的索引信息。
[0356]
实施例30,根据实施例28或29所述的方法,其中,所述预编码子矩阵为频域dft基向量组成的子矩阵;或者,
[0357]
所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
[0358]
实施例31,根据实施例27-30中任一实施例所述的方法,其中,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
[0359]
实施例32,根据实施例27-31中任一实施例所述的方法,其中,所述根据所述第一测量信息,测量第二定位信息,包括:
[0360]
记录所述第二定位测量参考信号的到达时刻t4;
[0361]
测量所述第二定位测量参考信号的到达角aoa2。
[0362]
实施例33,根据实施例32所述的方法,其中,所述方法还包括:
[0363]
记录所述第一定位测量参考信号的发送时刻t1;和/或,
[0364]
测量所述第一定位测量参考信号的发射角aod2。
[0365]
实施例34,根据实施例33所述的方法,其中,所述方法还包括:
[0366]
向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0367]
所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;
[0368]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0369]
实施例35,根据实施例27-34中任一实施例所述的方法,其中,所述第一指示信息承载于信道状态信息中。
[0370]
实施例36,根据实施例35所述的方法,其中,所述信道状态信息还包括但不限于:
[0371]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0372]
实施例37,一种多径下单锚点定位的方法,其中,应用于定位服务节点,包括:
[0373]
接收待定位节点发送的第三定位信息,以及参考节点发送的第四定位信息,其中,
所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于第一传输路径获得的定位信息,或者,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于相同的第一中间信息获得的定位信息,所述第一中间信息包括dft基向量;
[0374]
根据所述第三定位信息和所述第四定位信息,对所述待定位节点进行定位。
[0375]
实施例38,根据实施例37所述的方法,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0376]
所述第一时间信息包括:第一定位测量参考信号的到达时刻t2和第二定位测量参考信号的发送时刻t3;或者,第二定位测量参考信号的发送时刻t3和第一定位测量参考信号的到达时刻t2的差值t3-t2;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;
[0377]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0378]
实施例39,根据实施例38所述的方法,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0379]
所述第二时间信息包括:第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1;或者,第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1的差值t4-t1;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;
[0380]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0381]
实施例40,根据实施例39所述的方法,其中,所述根据所述第三定位信息和所述第四定位信息,获取所述待定位节点的定位信息,包括:
[0382]
根据所述第一时间信息和第二时间信息,确定往返时间;
[0383]
根据所述往返时间和所述第一角度信息中的aoa1与第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,
[0384]
根据所述往返时间和所述第一角度信息中的aod1与第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,
[0385]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,
[0386]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,
[0387]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,
[0388]
根据所述往返时间和所述第一角度信息中的aoa1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,
[0389]
根据所述往返时间和所述第一角度信息中的aod1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息。
[0390]
实施例41,一种通信节点,包括:
[0391]
接收模块,用于接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;
[0392]
处理模块,用于根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,所述第一传输路径为所述n条传输路径中的某一条传输路径;
[0393]
发送模块,用于向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,
[0394]
所述第一指示信息用于指示所述第一传输路径,以使所述参考节点测量所述第一传输路径上的第二定位信息。
[0395]
实施例42,根据实施例41所述的通信节点,其中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述通信节点还包括处理模块,用于根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0396]
实施例43,根据实施例42所述的通信节点,其中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:
[0397]
当所述第一传输路径为所述首达径时,所述第一指示信息为1;
[0398]
当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,
[0399]
当所述第一传输路径为所述首达径时,所述第一指示信息为0;
[0400]
当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0401]
实施例44,根据实施例41-43中任一实施例所述的通信节点,其中,所述处理模块,具体用于:
[0402]
记录所述第一定位测量参考信号的到达时刻t2;
[0403]
测量所述第一定位测量参考信号的到达角aoa1。
[0404]
实施例45,根据实施例44所述的通信节点,其中,所述处理模块,还具体用于:
[0405]
记录所述第二定位测量参考信号的发送时刻t3;和/或,
[0406]
测量所述第二定位测量参考信号的发射角aod1。
[0407]
实施例46,根据实施例45所述的通信节点,其中,所述发送模块,还用于向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0408]
所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;
[0409]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0410]
实施例47,根据实施例41-46中任一实施例所述的通信节点,其中,所述第一指示信息承载于信道状态信息中。
[0411]
实施例48,根据实施例47所述的通信节点,其中,所述信道状态信息还包括但不限于:
[0412]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0413]
实施例49,一种通信节点,包括:
[0414]
发送模块,用于发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0415]
接收模块,用于接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一传输路径,所述第一传输路径为所述n条传输路径中的某一条传输路径;
[0416]
处理模块,用于根据所述第一指示信息,在所述第一传输路径上测量第二定位信息。
[0417]
实施例50,根据实施例49所述的通信节点,其中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
[0418]
实施例51,根据实施例50所述的通信节点,其中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:
[0419]
当所述第一传输路径为所述首达径时,所述第一指示信息为1;
[0420]
当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,
[0421]
当所述第一传输路径为所述首达径时,所述第一指示信息为0;
[0422]
当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0423]
实施例52,根据实施例49-51中任一实施例所述的通信节点,其中,所述处理模块具体用于:
[0424]
记录所述第二定位测量参考信号的到达时刻t4;
[0425]
测量所述第二定位测量参考信号的到达角aoa2。
[0426]
实施例53,根据实施例52所述的通信节点,其中,所述处理模块,还具体用于:
[0427]
记录所述第一定位测量参考信号的发送时刻t1;和/或,
[0428]
测量所述第一定位测量参考信号的发射角aod2。
[0429]
实施例54,根据实施例53所述的通信节点,其中,所述发送模块,还用于,向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0430]
所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;
[0431]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0432]
实施例55,根据实施例49-54中任一实施例所述的通信节点,其中,所述第一指示信息承载于信道状态信息中。
[0433]
实施例56,根据实施例55所述的通信节点,其中,所述信道状态信息还包括但不限于:
[0434]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0435]
实施例57,一种通信节点,包括:
[0436]
接收模块,用于接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;
[0437]
处理模块,用于根据第一中间信息测量第一定位信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的离散傅里叶变换dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;
[0438]
发送模块,用于向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,
[0439]
所述第一指示信息用于指示所述第一中间信息,以使所述参考节点根据所述第一指示信息指示的所述第一中间信息测量第二定位信息。
[0440]
实施例58,根据实施例57所述的通信节点,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0441]
所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息。
[0442]
实施例59,根据实施例58所述的通信节点,其中,所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息,包括:
[0443]
所述第一指示信息包括所述dft基向量的索引信息。
[0444]
实施例60,根据实施例58或59所述的通信节点,其中,所述预编码子矩阵为频域dft基向量组成的子矩阵;或者,
[0445]
所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
[0446]
实施例61,根据实施例57-60中任一实施例所述的通信节点,其中,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述处理模块,还用于根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0447]
实施例62,根据实施例57-61中任一实施例所述的通信节点,其中,所述处理模块具体用于,记录所述第一定位测量参考信号的到达时刻t2;
[0448]
测量所述第一定位测量参考信号的到达角aoa1。
[0449]
实施例63,根据实施例62所述的通信节点,其中,所述处理模块,还具体用于记录所述第二定位测量参考信号的发送时刻t3;和/或,
[0450]
测量所述第二定位测量参考信号的发射角aod1。
[0451]
实施例64,根据实施例63所述的通信节点,其中,所述发送模块,还用于向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0452]
所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;
[0453]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0454]
实施例65,根据实施例57-64中任一实施例所述的通信节点,其中,所述第一指示信息承载于信道状态信息中。
[0455]
实施例66,根据实施例65所述的通信节点,其中,所述信道状态信息还包括但不限
于:
[0456]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0457]
实施例67,一种通信节点,包括:
[0458]
发送模块,用于发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0459]
接收模块,用于接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一中间信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;
[0460]
处理模块,用于根据所述第一指示信息,利用所述第一中间信息测量第二定位信息。
[0461]
实施例68,根据实施例67所述的通信节点,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0462]
所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息。
[0463]
实施例69,根据实施例67或68所述的通信节点,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0464]
所述第一指示信息包括所述dft基向量的索引信息。
[0465]
实施例70,根据实施例68或69所述的通信节点,其中,所述预编码子矩阵为频域dft基向量组成的子矩阵;或者,
[0466]
所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
[0467]
实施例71,根据实施例67-70中任一实施例所述的通信节点,其中,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
[0468]
实施例72,根据实施例67-71中任一实施例所述的通信节点,其中,所述处理模块,具体用于:
[0469]
记录所述第二定位测量参考信号的到达时刻t4;
[0470]
测量所述第二定位测量参考信号的到达角aoa2。
[0471]
实施例73,根据实施例72所述的通信节点,其中,所述处理模块,还具体用于:
[0472]
记录所述第一定位测量参考信号的发送时刻t1;和/或,
[0473]
测量所述第一定位测量参考信号的发射角aod2。
[0474]
实施例74,根据实施例73所述的通信节点,其中,所述发送模块,还用于向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0475]
所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;
[0476]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述
第一定位测量参考信号的发射角aod2。
[0477]
实施例75,根据实施例67-74中任一实施例所述的通信节点,其中,所述第一指示信息承载于信道状态信息中。
[0478]
实施例76,根据实施例75所述的通信节点,其中,所述信道状态信息还包括但不限于:
[0479]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0480]
实施例77,一种通信节点,包括:
[0481]
接收模块,用于接收待定位节点发送的第三定位信息,以及参考节点发送的第四定位信息,其中,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于第一传输路径获得的定位信息,或者,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于相同的第一中间信息获得的定位信息,所述第一中间信息包括dft基向量;
[0482]
处理模块,用于根据所述第三定位信息和所述第四定位信息,对所述待定位节点进行定位。
[0483]
实施例78,根据实施例77所述的通信节点,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0484]
所述第一时间信息包括:第一定位测量参考信号的到达时刻t2和第二定位测量参考信号的发送时刻t3;或者,第二定位测量参考信号的发送时刻t3和第一定位测量参考信号的到达时刻t2的差值t3-t2;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;
[0485]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0486]
实施例79,根据实施例78所述的通信节点,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0487]
所述第二时间信息包括:第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1;或者,第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1的差值t4-t1;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;
[0488]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0489]
实施例80,根据实施例79所述的通信节点,其中,所述处理模块,具体用于:
[0490]
根据所述第一时间信息和第二时间信息,确定往返时间;
[0491]
根据所述往返时间和所述第一角度信息中的aoa1与第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,
[0492]
根据所述往返时间和所述第一角度信息中的aod1与第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,
[0493]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,
[0494]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信
息中的aod2,计算所述待定位节点的定位信息;或者,
[0495]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,
[0496]
根据所述往返时间和所述第一角度信息中的aoa1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,
[0497]
根据所述往返时间和所述第一角度信息中的aod1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息。
[0498]
实施例81,一种通信装置,其中,包括至少一个处理器、通信接口和存储器,所述通信接口用于所述通信装置与其它通信装置进行信息交互,所述存储器存储有计算机程序指令,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0499]
接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;
[0500]
根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,所述第一传输路径为所述n条传输路径中的某一条传输路径;
[0501]
向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,
[0502]
所述第一指示信息用于指示所述第一传输路径,以使所述参考节点测量所述第一传输路径上的第二定位信息。
[0503]
实施例82,根据实施例81所述的通信装置,其中,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0504]
根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0505]
实施例83,根据实施例82所述的通信装置,其中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:
[0506]
当所述第一传输路径为所述首达径时,所述第一指示信息为1;
[0507]
当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,
[0508]
当所述第一传输路径为所述首达径时,所述第一指示信息为0;
[0509]
当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0510]
实施例84,根据实施例81-83中任一实施例所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0511]
记录所述第一定位测量参考信号的到达时刻t2;
[0512]
测量所述第一定位测量参考信号的到达角aoa1。
[0513]
实施例85,根据实施例84所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0514]
记录所述第二定位测量参考信号的发送时刻t3;和/或,
[0515]
测量所述第二定位测量参考信号的发射角aod1。
[0516]
实施例86,根据实施例85所述的通信装置,其中,当所述计算机程序指令在所述至
少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0517]
向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0518]
所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;
[0519]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0520]
实施例87,根据实施例81-86中任一实施例所述的通信装置,其中,所述第一指示信息承载于信道状态信息中。
[0521]
实施例88,根据实施例87所述的通信装置,其中,所述信道状态信息还包括但不限于:
[0522]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0523]
实施例89,一种通信装置,其中,包括至少一个处理器、通信接口和存储器,所述通信接口用于所述通信装置与其它通信装置进行信息交互,所述存储器存储有计算机程序指令,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0524]
发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0525]
接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一传输路径,所述第一传输路径为所述n条传输路径中的某一条传输路径;
[0526]
根据所述第一指示信息,在所述第一传输路径上测量第二定位信息。
[0527]
实施例90,根据实施例89所述的通信装置,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
[0528]
实施例91,根据实施例90所述的通信装置,其中,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:
[0529]
当所述第一传输路径为所述首达径时,所述第一指示信息为1;
[0530]
当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,
[0531]
当所述第一传输路径为所述首达径时,所述第一指示信息为0;
[0532]
当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0533]
实施例92,根据实施例89-91中任一实施例所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0534]
记录所述第二定位测量参考信号的到达时刻t4;
[0535]
测量所述第二定位测量参考信号的到达角aoa2。
[0536]
实施例93,根据实施例92所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0537]
记录所述第一定位测量参考信号的发送时刻t1;和/或,
[0538]
测量所述第一定位测量参考信号的发射角aod2。
[0539]
实施例94,根据实施例93所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0540]
向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0541]
所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;
[0542]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0543]
实施例95,根据实施例89-94中任一实施例所述的通信装置,其中,所述第一指示信息承载于信道状态信息中。
[0544]
实施例96,根据实施例95所述的通信装置,其中,所述信道状态信息还包括但不限于:
[0545]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0546]
实施例97,一种通信装置,其中,包括至少一个处理器、通信接口和存储器,所述通信接口用于所述通信装置与其它通信装置进行信息交互,所述存储器存储有计算机程序指令,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0547]
接收经由n条传输路径传输的第一定位测量参考信号,所述第一定位测量参考信号由参考节点发送,n为大于1的整数;
[0548]
根据第一中间信息测量第一定位信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的离散傅里叶变换dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;
[0549]
向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,
[0550]
所述第一指示信息用于指示所述第一中间信息,以使所述参考节点根据所述第一指示信息指示的所述第一中间信息测量第二定位信息。
[0551]
实施例98,根据实施例97所述的通信装置,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0552]
所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息。
[0553]
实施例99,根据实施例98所述的通信装置,其中,所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息,包括:
[0554]
所述第一指示信息包括所述dft基向量的索引信息。
[0555]
实施例100,根据实施例98或99所述的通信装置,其中,所述预编码子矩阵为频域dft基向量组成的子矩阵;或者,
[0556]
所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
[0557]
实施例101,根据实施例97-100中任一实施例所述的通信装置,其中,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所
述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0558]
根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0559]
实施例102,根据实施例97-101中任一实施例所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0560]
记录所述第一定位测量参考信号的到达时刻t2;
[0561]
测量所述第一定位测量参考信号的到达角aoa1。
[0562]
实施例103,根据实施例102所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0563]
记录所述第二定位测量参考信号的发送时刻t3;和/或,
[0564]
测量所述第二定位测量参考信号的发射角aod1。
[0565]
实施例104,根据实施例103所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0566]
向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0567]
所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;
[0568]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0569]
实施例105,根据实施例97-104中任一实施例所述的通信装置,其中,所述第一指示信息承载于信道状态信息中。
[0570]
实施例106,根据实施例105所述的通信装置,其中,所述信道状态信息还包括但不限于:
[0571]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0572]
实施例107,一种通信装置,其中,包括至少一个处理器、通信接口和存储器,所述通信接口用于所述通信装置与其它通信装置进行信息交互,所述存储器存储有计算机程序指令,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0573]
发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0574]
接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一中间信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;
[0575]
根据所述第一指示信息,利用所述第一中间信息测量第二定位信息。
[0576]
实施例108,根据实施例107所述的通信装置,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0577]
所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息。
[0578]
实施例109,根据实施例107或108所述的通信装置,其中,所述第一指示信息用于指示所述第一中间信息,包括:
[0579]
所述第一指示信息包括所述dft基向量的索引信息。
[0580]
实施例110,根据实施例108或109所述的通信装置,其中,所述预编码子矩阵为频域dft基向量组成的子矩阵;或者,
[0581]
所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
[0582]
实施例111,根据实施例107-110中任一实施例所述的通信装置,其中,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小。
[0583]
实施例112,根据实施例107-111中任一实施例所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0584]
记录所述第二定位测量参考信号的到达时刻t4;
[0585]
测量所述第二定位测量参考信号的到达角aoa2。
[0586]
实施例113,根据实施例112所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0587]
记录所述第一定位测量参考信号的发送时刻t1;和/或,
[0588]
测量所述第一定位测量参考信号的发射角aod2。
[0589]
实施例114,根据实施例113所述的通信装置,其中,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0590]
向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0591]
所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;
[0592]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0593]
实施例115,根据实施例107-114中任一实施例所述的通信装置,其中,所述第一指示信息承载于信道状态信息中。
[0594]
实施例116,根据实施例115所述的通信装置,其中,所述信道状态信息还包括但不限于:
[0595]
预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0596]
实施例117,一种通信装置,其中,包括至少一个处理器、通信接口和存储器,所述通信接口用于所述通信装置与其它通信装置进行信息交互,所述存储器存储有计算机程序指令,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0597]
接收待定位节点发送的第三定位信息,以及参考节点发送的第四定位信息,其中,
所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于第一传输路径获得的定位信息,或者,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于相同的第一中间信息获得的定位信息,所述第一中间信息包括dft基向量;
[0598]
根据所述第三定位信息和所述第四定位信息,对所述待定位节点进行定位。
[0599]
实施例118,根据实施例117所述的通信装置,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,
[0600]
所述第一时间信息包括:第一定位测量参考信号的到达时刻t2和第二定位测量参考信号的发送时刻t3;或者,第二定位测量参考信号的发送时刻t3和第一定位测量参考信号的到达时刻t2的差值t3-t2;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;
[0601]
所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0602]
实施例119,根据实施例118所述的通信装置,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,
[0603]
所述第二时间信息包括:第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1;或者,第二定位测量参考信号的到达时刻t4和第一定位测量参考信号的发送时刻t1的差值t4-t1;其中,所述第一定位测量参考信号为所述参考节点发送的,所述第二定位测量参考信号为所述待定位节点发送的;
[0604]
所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0605]
实施例120,根据实施例119所述的通信装置,当所述计算机程序指令在所述至少一个处理器中执行时,使得所述通信装置实现如下步骤:
[0606]
根据所述第一时间信息和第二时间信息,确定往返时间;
[0607]
根据所述往返时间和所述第一角度信息中的aoa1与第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,
[0608]
根据所述往返时间和所述第一角度信息中的aod1与第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,
[0609]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,
[0610]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,
[0611]
根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,
[0612]
根据所述往返时间和所述第一角度信息中的aoa1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,
[0613]
根据所述往返时间和所述第一角度信息中的aod1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息。
[0614]
实施例121,一种通信系统,包括待定位节点和参考节点,其中,参考节点,用于发
送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0615]
待定位节点,用于接收经由n条传输路径传输的第一定位测量参考信号;根据第一传输路径上的所述第一定位测量参考信号,测量第一定位信息,所述第一传输路径为所述n条传输路径中的某一条传输路径;向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,所述第一指示信息用于指示所述第一传输路径,以使所述参考节点测量所述第一传输路径上的第二定位信息;
[0616]
参考节点,还用于接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一传输路径,所述第一传输路径为所述n条传输路径中的某一条传输路径;根据所述第一指示信息,在所述第一传输路径上测量第二定位信息。
[0617]
实施例122,根据实施例121所述的通信系统,所述第一传输路径为首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述待定位节点,还用于根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0618]
实施例123,根据实施例121或122所述的通信系统,所述第一指示信息用1比特信息表征,所述第一指示信息用于指示所述第一传输路径的信息,包括:当所述第一传输路径为所述首达径时,所述第一指示信息为1;当所述第一传输路径为所述最强径时,所述第一指示信息为0;或者,当所述第一传输路径为所述首达径时,所述第一指示信息为0;当所述第一传输路径为所述最强径时,所述第一指示信息为1。
[0619]
实施例124,根据实施例121至123中任一实施例所述的通信系统,所述待定位节点,还用于记录所述第一定位测量参考信号的到达时刻t2;测量所述第一定位测量参考信号的到达角aoa1。
[0620]
实施例125,根据实施例121至124中任一实施例所述的通信系统,所述待定位节点,还用于记录所述第二定位测量参考信号的发送时刻t3;和/或,测量所述第二定位测量参考信号的发射角aod1。
[0621]
实施例126,根据实施例121至125中任一实施例所述的通信系统,所述参考节点,还用于记录所述第二定位测量参考信号的到达时刻t4;测量所述第二定位测量参考信号的到达角aoa2。
[0622]
实施例127,根据实施例121至126中任一实施例所述的通信系统,所述参考节点,还用于记录所述第一定位测量参考信号的发送时刻t1;和/或,测量所述第一定位测量参考信号的发射角aod2。
[0623]
实施例128,根据实施例121至127中任一实施例所述的通信系统,所述待定位节点,还用于向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0624]
实施例129,根据实施例121至128中任一实施例所述的通信系统,所述参考节点,
还用于向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0625]
实施例130,根据实施例121至129中任一实施例所述的通信系统,所述第一指示信息承载于信道状态信息中。
[0626]
实施例131,根据实施例121至130中任一实施例所述的通信系统,所述信道状态信息还包括但不限于:预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0627]
实施例132,一种通信系统,包括待定位节点和参考节点,其中,参考节点,用于发送第一定位测量参考信号,所述第一定位测量参考信号经由n条传输路径传输至待定位节点,n为大于1的整数;
[0628]
待定位节点,用于接收经由n条传输路径传输的第一定位测量参考信号;根据第一中间信息测量第一定位信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的离散傅里叶变换dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;向所述参考节点发送第一指示信息和第二定位测量参考信号,其中,所述第一指示信息用于指示所述第一中间信息,以使所述参考节点根据所述第一指示信息指示的所述第一中间信息测量第二定位信息;
[0629]
参考节点,还用于接收所述待定位节点发送的第一指示信息和第二定位测量参考信号,所述第一指示信息用于指示第一中间信息,所述第一中间信息包括与第一传输路径在预编码子矩阵中对应的dft基向量,所述第一传输路径属于所述n条传输路径中的某一条传输路径;根据所述第一指示信息,利用所述第一中间信息测量第二定位信息。
[0630]
实施例133,根据实施例132所述的通信系统,所述第一指示信息用于指示所述第一中间信息,包括:所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息。
[0631]
实施例134,根据实施例132或133所述的通信系统,所述第一指示信息包括与所述第一传输路径在预编码子矩阵中对应的dft基向量的标识信息,包括:所述第一指示信息包括所述dft基向量的索引信息。
[0632]
实施例135,根据实施例132至134中任一实施例所述的通信系统,所述预编码子矩阵为频域dft基向量组成的子矩阵;或者,所述预编码子矩阵为空域和频域二维dft基向量组成的子矩阵。
[0633]
实施例136,根据实施例132至135中任一实施例所述的通信系统,所述第一传输路径为经过所述dft基向量投影后分辨出的首达径或者最强径,其中,所述首达径上的所述第一定位测量参考信号的传输时延最小,所述最强径上的所述第一定位测量参考信号的衰减最小,所述待定位节点,还用于:根据所述第一定位测量参考信号的传输时延和/或信号功率,确定所述第一传输路径。
[0634]
实施例137,根据实施例132至136中任一实施例所述的通信系统,所述待定位节
点,还用于记录所述第一定位测量参考信号的到达时刻t2;测量所述第一定位测量参考信号的到达角aoa1。
[0635]
实施例138,根据实施例132至137中任一实施例所述的通信系统,所述待定位节点,还用于记录所述第二定位测量参考信号的发送时刻t3;和/或,测量所述第二定位测量参考信号的发射角aod1。
[0636]
实施例139,根据实施例132至138中任一实施例所述的通信系统,所述参考节点,还用于记录所述第二定位测量参考信号的到达时刻t4;测量所述第二定位测量参考信号的到达角aoa2。
[0637]
实施例140,根据实施例132至139中任一实施例所述的通信系统,所述参考节点,还用于记录所述第一定位测量参考信号的发送时刻t1;和/或,测量所述第一定位测量参考信号的发射角aod2。
[0638]
实施例141,根据实施例132至140中任一实施例所述的通信系统,所述待定位节点,还用于向定位服务节点发送第三定位信息,其中,所述第三定位信息包括第一时间信息;或者,所述第三定位信息包括第一时间信息和第一角度信息;其中,所述第一时间信息包括:所述第一定位测量参考信号的到达时刻t2和所述第二定位测量参考信号的发送时刻t3;或者,所述第二定位测量参考信号的发送时刻t3和所述第一定位测量参考信号的到达时刻t2的差值t3-t2;所述第一角度信息包括:所述第一定位测量参考信号的到达角aoa1;和/或,所述第二定位测量参考信号的发射角aod1。
[0639]
实施例142,根据实施例132至141中任一实施例所述的通信系统,所述参考节点,还用于向定位服务节点发送第四定位信息,其中,所述第四定位信息包括第二时间信息;或者,所述第四定位信息包括第二时间信息和第二角度信息;其中,所述第二时间信息包括:所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1;或者,所述第二定位测量参考信号的到达时刻t4和所述第一定位测量参考信号的发送时刻t1的差值t4-t1;所述第二角度信息包括:所述第二定位测量参考信号的到达角aoa2;和/或,所述第一定位测量参考信号的发射角aod2。
[0640]
实施例143,根据实施例132至142中任一实施例所述的通信系统,所述第一指示信息承载于信道状态信息中。
[0641]
实施例144,根据实施例132至143中任一实施例所述的通信系统,所述信道状态信息还包括但不限于:预编码矩阵指示信息pmi、信道质量指示信息cqi、信道矩阵的秩指示信息ri。
[0642]
实施例145,根据实施例121至143中任一实施例所述的通信系统,所述通信系统还包括定位服务节点,用于接收待定位节点发送的第三定位信息,以及参考节点发送的第四定位信息,其中,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于第一传输路径获得的定位信息,或者,所述第三定位信息和所述第四定位信息分别包括所述待定位节点和所述参考节点基于相同的第一中间信息获得的定位信息,所述第一中间信息包括dft基向量;根据所述第三定位信息和所述第四定位信息,对所述待定位节点进行定位。
[0643]
实施例146,根据实施例145所述的通信系统,所述定位服务节点具体用于:根据所述第一时间信息和第二时间信息,确定往返时间;根据所述往返时间和所述第一角度信息
中的aoa1与第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aod1与第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aod2,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1与aod1的加权值及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aoa1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息;或者,根据所述往返时间和所述第一角度信息中的aod1及第二角度信息中的aoa2与aod2的加权值,计算所述待定位节点的定位信息。
[0644]
实施例147,一种计算机程序产品,当其在计算机上运行时,使得计算机可以执行上述实施例1至实施例40任一实施例所涉及的方法。
[0645]
实施例148,一种计算机可读存储介质,该计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机可以执行上述实施例1至实施例40任一实施例所涉及的方法。
[0646]
实施例149,一种芯片,该芯片包括处理器,当该处理器执行指令时,处理器用于执行上述实施例1至实施例40任一实施例所涉及的方法。该指令可以来自芯片内部的存储器,也可以来自芯片外部的存储器。可选的,该芯片还包括输入输出电路。
[0647]
上述本技术实施例提供的通信节点、通信装置、计算机可读存储介质、计算机程序产品、芯片均用于执行上文所提供的方法,因此,其所能达到的有益效果可参考上文所提供的方法对应的有益效果,在此不再赘述。
[0648]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本技术实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其它可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者通过所述计算机可读存储介质进行传输。所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,dvd)、或者半导体介质(例如,固态硬盘(solid state disk,ssd))等。
[0649]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,该流程可以由计算机程序来指令相关的硬件完成,该程序可存储于计算机可读取存储介质中,该程序在执行时,可包括如上述各方法实施例的流程。而前述的存储介质包括:rom或随机存储记忆体ram、磁碟或者光盘等各种可存储程序代码的介质。
[0650]
以上所述,仅为本技术实施例的具体实施方式,但本技术实施例的保护范围并不局限于此,任何在本技术实施例揭露的技术范围内的变化或替换,都应涵盖在本技术实施例的保护范围之内。因此,本技术实施例的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1