成像系统和方法与流程
成像系统和方法
1.相关申请的交叉参考
2.本技术要求2021年3月31日提交的美国临时专利申请序列号63/168,768的利益,该专利申请的公开内容在此通过引用被全部并入,如同在本文中充分阐述的。
技术领域
3.本公开一般涉及成像系统和方法,包括可与智能电话相机结合使用的成像系统和方法,诸如以模拟全帧相机和镜头。
背景技术:
4.下面阐述的该背景描述只是为了提供上下文。因此,本背景描述的任何方面在不以其他方式符合现有技术的意义上既不明确也不隐含地承认是针对本公开的现有技术。
5.将全帧相机和镜头并入智能电话可能是不可行或不实际的,但期望模拟一个或多个全帧相机和镜头以用于经由智能电话相机捕获的图像。
6.期望最小化或消除成像系统和方法的一个或多个挑战或缺点的解决方案/选项。上述的讨论仅旨在说明本领域的示例,并不是范围的否定。
技术实现要素:
7.在示例性的说明性实施例中,一种生成图像的方法可以包括:获得全帧相机和镜头的组合的配置文件(profile);从移动电子设备的电子传感器获得图像信息;和/或经由移动电子设备的电子控制单元,通过将一个或多个配置文件中的配置文件应用于图像信息来生成最终数字图像。
8.采用一些示例实施例,一种成像系统可以包括:被存储在电子存储器中的全帧相机和镜头的组合的多个电子配置文件,以及被配置为经由移动电子设备的电子传感器获得图像信息的移动电子设备。移动电子设备可被配置为经由移动电子设备的电子控制单元,通过将多个电子配置文件中的配置文件应用于图像信息来生成最终数字图像。
9.通过阅读以下描述以及查看附图,本公开的示例/实施例的上述和其他潜在的方面、特征、细节、效用和/或优点将是显而易见的。
附图说明
10.虽然权利要求不限于特定图示,但通过讨论各种示例,可以获得对各方面的认识。附图不一定按比例绘制,并且为了更好地展示和解释示例的创新方面,某些特征可能被夸大或隐藏。进一步地,本文所描述的示例性说明不是穷尽的或以其他方式进行限制,并且不限于附图所示的或在下面具体实施方式中公开的精确形式和配置。通过参考以下附图对示例性图示进行详细描述:
11.图1是一般示出全帧相机的实施例的正面透视图。
12.图2是一般示出移动电子设备的实施例的正视图。
13.图3是一般示出全帧相机的实施例的正视图。
14.图3a是全帧相机的传感器的实施例的表示。
15.图4是一般示出移动电子设备的实施例的正视图。
16.图4a是移动电子设备的传感器的实施例的表示。
17.图4b是一般示出移动电子设备的实施例的透视图。
18.图5a至图5c是分别经由另一个移动电子设备、全帧相机和镜头的示例性实施例、以及移动电子设备的示例性实施例生成/捕获的图像。
19.图6是示出成像方法的示例性实施例的图。
20.图7是示出成像方法的示例性实施例的图。
21.图8是示出包括生成经增强的深度信息/深度图的成像方法的示例性实施例的图。
22.图9是示出全帧相机和电子显示器的说明性实施例的表示。
23.图10a至图12是与全帧相机和镜头相关联的点扩散函数(psf)的说明性实施例的表示。
24.图13是示出成像方法的示例性实施例的部分的流程图。
25.图14是示出成像方法的示例性实施例的部分的流程图。
具体实施方式
26.现在将详细参考本公开的说明性实施例,其中的示例在本文中描述并在附图中示出。虽然本公开将结合实施例和/或示例进行描述,但它们并不将本公开限于这些实施例和/或示例。相反,本公开覆盖替代方案、修改和等同方案。
27.全帧相机100和镜头102(例如参见图1)可以对至少一些图像提供虚化。例如,虚化可以包括图像的失焦部分的模糊的美学效果(例如参见图5b中的图像110)。全帧相机和镜头的各种部件(诸如光圈叶片、光晕、球面像差和/或色差等)可影响相机/镜头如何渲染虚化。
28.智能电话相机通常具有小得多的图像传感器,其具有显著小于全帧相机的表面积来捕获光(例如参见图3a和图4a的比较),并可产生几乎无限的景深,这可将背景图像渲染得几乎与对象/目标本身一样锐利,以使得图像的任何部分都不会出现失焦(例如参见图5a中的图像120)。虽然一些智能电话相机具有模糊图像的背景部分的模式(例如,人像模式),但是,该模糊并不模拟与全帧相机和镜头组合相关联的光学效果,诸如光学渐晕、色差、球面像差和/或摄影师可用于在其艺术中实现特别外观的虚化的各种其他特性。相反,智能电话模糊可能是均匀且完全无颗粒的,这可能对模糊提供不自然的外观,并且对于观看者的眼睛几乎没有变化。
29.采用本公开的实施例,移动电子设备300可以被配置为模拟一个或多个全帧相机100、镜头102、和/或全帧相机和镜头组合的一个或多个效果(例如参见图5b中来自全帧相机和镜头组合的图像110),诸如与这种组合相关联的虚化(例如参见图5c中图像400中的模拟效果)。此外,可以使用不同的模拟配置文件,其中,每个模拟配置文件代表唯一的全帧相机和镜头组合。对于每个模拟配置文件,有效地模拟全帧相机100和镜头102的虚化可以包括:获得原始图像,诸如在逐像素的基础上(例如,而不是应用均匀的模糊)获得准确的深度信息,和/或获得全帧相机和镜头组合的数字化/电子配置文件。准确的深度信息可以例如
经由深度图来提供。模拟虚化可包括将准确的/经修改的深度信息和配置文件应用于原始图像。
30.在诸如在图2中一般示出的示例性实施例中,成像系统200可以包括移动电子设备300(例如,智能电话),其可以包括第一电子传感器320、第二电子传感器322和/或电子控制单元(ecu)324。移动电子在300可以例如包括无线/蜂窝收发机/无线电/调制解调器326,其可与ecu 324连接、结合和/或通信,并且可以被配置为与蜂窝网络和/或另一个无线网络通信(例如,移动电子设备可以被配置为蜂窝电话)。移动电子设备300可以包括存储器332、显示器334、和/或处理器336(例如参见图8)。移动电子设备300可以相对薄(例如参见图4b)。例如但不限于,移动电子设备300可以具有大约1英寸(25.4mm)或更小、大约0.5英寸(12.7mm)或更小、或者大约0.4英寸(10.6mm)或更小等的厚度300t。在一些示例中,移动电子设备300可以包括至少4英寸(101.6mm)的高度300h和/或至少2英寸(50.8mm)的宽度。例如但不限于,移动电子设备300的宽度可以是其厚度的至少5倍和/或高度可以是其厚度的至少10倍。
31.采用诸如在图1、图3和图3a中一般示出的示例性实施例,全帧相机和镜头组合可以相对厚,和/或可以包括相对大的颜色传感器104。例如但不限于,全帧相机100可包括至少1.5英寸(38mm)厚或更厚的深度/厚度,和/或镜头可包括2英寸(51mm)或更厚(例如,大约3英寸(76mm))的深度/厚度,这可提供全帧相机100和镜头102的组合,其组合的深度/厚度大约是3.5英寸(89mm)或更厚。附加地或可替代地,全帧相机100的颜色传感器104的面积可以例如但不限于至少是1.24in2(800mm2),诸如大约1.34in2(864mm2)。
32.在诸如在图4和图4a中一般示出的示例性实施例中,移动电子设备300的第一电子传感器320的颜色传感器330的实施例可以显著小于全帧相机100的颜色传感器。例如但不限于,移动电子设备300的实施例的颜色传感器330的面积可以小于1in2(645.16mm2)、小于0.5in2(322.58mm2)、和/或大约0.16in2(100mm2)至大约0.23in2(150mm2),诸如大约0.19in2(123mm2)。移动电子设备300的至少一些实施例的颜色传感器330可以明显大于其他移动电子设备(例如,其他智能电话)。例如但不限于,苹果iphone 12pro max可包括大约0.05in2(35mm2)的传感器面积。较小的颜色传感器能够比较大的颜色传感器在同一时间捕获更少(例如,按比例减少)的光。
33.在一些情况下,全帧相机/镜头100/102的一个或多个色差因子可以经由多通道psf(例如,跨越几个波长模拟的)来评估。色差强度可以随着相机100与显示器430之间的距离而变化。不以主射线为中心的psf可出现失焦。聚焦的psf可包括色差。
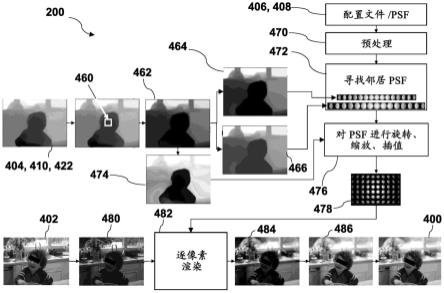
34.采用诸如在图6和图7中一般示出的示例性实施例,成像系统200(例如,移动电子设备300的ecu 324)可以被配置为获得初始图像402,获得深度信息404,获得全帧相机100、镜头102、和/或全帧相机100和镜头102的组合的配置文件406,对深度信息404进行增强以获得经修改的深度图/信息422(框340),模拟相机100和/或镜头102(框342),和/或生成最终数字图像400,其包括全帧相机100和/或镜头102的模拟效果。配置文件406可以包括一个或多个psf 408(例如,psf信息)。
35.在诸如在图8中一般示出的示例性实施例中,深度信息404可以经由可包括飞行时间(tof)传感器的第二电子传感器322来获得。深度信息404可以包括深度数据410和/或深度置信度信息412。可以经由移动电子设备300的第一电子传感器320(例如,经由颜色传感
器330)捕获多个图像420。ecu 324可以选择多个图像420中的两个或更多个图像以用于视差计算。ecu 324可以利用深度信息404(其可以包括深度数据410和/或深度置信度信息412)和/或视差计算以生成经修改/增强的深度信息和/或深度图422(框340)。
36.在示例性实施例中,全帧相机100和/或镜头102的配置文件406可以包括一个或多个点扩散函数(psf)408,诸如在图10a至图11b中一般示出的。获得配置文件406可以包括操作全帧相机100和/或镜头102以生成一个或多个psf 408。例如,全帧相机100和镜头102可以被操作以捕获来自电子显示器430的光和/或电子显示器430的一个或多个轮廓图像,诸如在多个距离处(例如参见图9)。电子显示器430可以例如但不限于包括有机发光二极管(oled)显示器。电子显示器430可以在黑色背景434上显示多个白色圆圈432。每个psf 408可包括相应的圆圈432的特性,诸如形状、色差、散射现象(fringing)、和/或非均匀强度分布等(例如参见图10a至图11b)。特性可以跨视场地变化(例如,对于相机/镜头100/102与显示器430之间的特定深度/距离)和/或可以取决于相机/镜头100/102与显示器430之间的深度/距离而变化。配置文件406可以包括psf信息,该psf信息可以以网格/矩阵(x,y)格式存储。psf信息可以包括针对每个相应深度和焦距(例如,psf的层)的psf 408,和/或psf信息可以被存储在三维矩阵(x,y,z/深度)中。psf 408(及其特性)可被(例如,移动电子设备300)利用以模拟相机/镜头100/102的行为。psf 408中的信息可以包括光强度信息,,其可以例如包括单个值或多个值(例如,三个颜色值rgb)。
37.采用诸如在图10a至图11b中一般示出的示例性实施例,可以诸如由移动电子设备300和/或远程计算机服务器440修改初始psf信息。例如但不限于,初始psf信息(诸如图10a所示(焦点1.2m,深度1.4m)和图11a所示(焦点1.2m,深度2.5m))可以被归一化和/或白平衡,诸如psf信息被模拟,以生成经修改的psf信息,诸如图10b所示(焦点1.2m,深度1.4m)和图11b所示(焦点1.2m,深度2.5m)。
38.在一些示例中,可以创建用于各种相机100、镜头102、和/或相机-镜头组合的配置文件和/或psf 408的库444(例如,电子库),并使移动电子设备300可访问该库。例如但不限于,库444的一部分或全部可以被上载到和/或存储在移动电子设备300的存储器332上。附加地或可替代地,库444的一部分或全部可以被存储在远程服务器440的存储器442上,并且移动电子设备300可以被配置为与远程服务器440(例如,经由全球计算机和/或蜂窝网络无线地)通信以获得配置文件和/或psf信息。库440可包括针对一些或所有位置(x,y)、深度(z)和/或焦距的psf 408。远程服务器440可包括远程服务器ecu 466和/或处理器448。ecu 446可包括和/或被连接到存储器442和/或处理器448。
39.在一些说明性实施例中,配置文件406和/或psf 408可以经由模拟来生成。例如,相机100和/或镜头102的物理尺寸和特性、照明信息和/或深度信息等可以仅被提供给psf模拟器450,诸如由zemax llc提供的zemax opticstudio。psf模拟器450可以利用输入信息来生成模拟信息,以生成psf 408,该psf可以模拟经由相机/镜头100/102直接生成的psf。在一些示例中,psf模拟器450可以与远程服务器440一起被包括、通信、和/或连接(例如,经由有线连接、无线连接、可移除介质等)(例如参见图8)。
40.在诸如在图12中一般示出的示例性实施例中,配置文件406可包括可以一维矩阵(例如,对于每个深度和焦距)被存储在移动电子设备300和/或远程服务器440上的psf信息,这可允许更有效地应用psf信息和/或允许更密集/更高质量的psf信息被移动电子设备
300利用和/或存储在移动电子设备300上。例如,psf信息可以被存储为距中心的径向位置(例如,而不是x、y位置)的函数,从而有效地将二维网格降低成一维条带/阵列/矩阵452。然后,条带452可以围绕中心“旋转”以提供覆盖传感器320上的圆形区域的psf信息,这可近似跨该区域的一组完整的psf 408。对于旋转对称的镜头102,使用该近似可以有效地与全psf信息相同。psf信息仍然可以包括三个值(对于r、g、b),即使在被存储在一维条带/阵列/矩阵452中时。
41.采用示例性实施例,psf的一阶近似可以使用近邻(nn)psf采样和/或缩放以用于深度。第一细化可以包括ecu 324利用双线性空间采样和/或归一化的空间缩放。第二细化可以包括ecu 324进行三线性空间和/或深度采样和缩放/旋转校正。第三细化可以包括ecu 324进行近似基分解和/或缩放/旋转校正。可分离的近似可以提供额外的细化。可改进处理速度的第四细化可以包括ecu 324进行缩减采样技术(例如,缩减随机采样技术)。第五细化可以包括ecu 324进行多缩放。
42.图13一般示出了成像方法的示例性实施例。该成像方法可以包括利用深度信息404(例如,深度图410、422)、配置文件406、一个或多个psf408(例如,psf信息)和/或初始/原始图像402来模拟相机100和/或镜头102,其可以包括ecu 324。ecu 324可以获得/识别深度图410、422中的焦点区域/焦点460。例如但不限于,焦点区域/焦点460可以由传感器(例如,第一电子传感器320和/或第二电子传感器322)识别,可以是深度图410、422的中心、和/或可以是用户特定的。ecu 324可以诸如使用透镜方程(1除以物体距离和1除以图像距离之和等于1除以焦距)来将深度图410、422转换为模糊半径图462。该转换可以包括将深度值(例如,以毫米为单位)转换为颜色/光传感器上的模糊的半径。在一些实施例中,ecu324可以对模糊半径图462应用引导式放大。引导式放大可以包括边缘细化,其可以使模糊边缘与图像边缘对准。
43.在说明性实施例中,ecu 324可以生成经量化的经放大的模糊半径图464、466,诸如到psf信息(例如,psf阵列)中的最接近索引。在一些情况下,模糊半径图462可以包括连续的模糊,但是获得、访问和/或利用连续的psf信息(例如,对于连续的深度)可能是不可行的,并且ecu 324可以识别针对最接近相应的像素(在该像素的前面和该像素的后面)的深度可用的psf 408(框472)。例如,如果像素的深度是1.9m,但psf对于1.9m不可用,则ecu 324可以选择在该像素前面的第一psf 408(例如,针对1.8m的psf)和在该像素后面的第二psf 408(例如,针对2.1m的psf)。ecu 324可以对邻近某一或每个像素的psf进行旋转、缩放和/或插值(框476),诸如以生成经修改的psf信息478。例如,ecu 324可以对在距第一psf 408和第二psf 408的1.9m处的像素的psf信息进行插值,并且可以向第一psf 408提供较大的权重,因为它比第二psf 408更接近该像素的深度。可用的psf 408的数量可以例如但不限于对应于相对于深度的对数函数,其中,对于较小的深度,较多数量的psf 408可用,并且随着深度增加,可用的psf 408的数量以增加的速率减少。在一些情况下,ecu 324可以预处理psf信息(框470),诸如在识别前后邻居psf之前。量化可以被应用于每个像素。在一些示例中,ecu 324可以诸如在框476之前计算残差缩放和/或插值因子(框474)。
44.采用示例性实施例,ecu 324可以将初始/原始图像402转换为线性色调曲线/伽马,以生成经转换的初始图像480,和/或ecu 324应用逐像素(per-pixel)渲染过程(框482),该过程可以至少部分地基于经转换的初始图像480和经修改的psf信息478,以提供中
间图像484。逐像素渲染(框482)可以包括累加、归一化、和/或混合。在逐像素渲染过程(框482)之后,ecu 324可以针对中间图像484恢复色调曲线/伽马以生成恢复的图像486。ecu 324可以将锐利像素混合回中间图像484的前景中,和/或输出中间图像作为经修改的(例如,恢复的和/或混合回的),作为输出图像(例如,最终数字图像400)。
45.用于模拟失焦图像的两种说明性方法可包括散射和聚集。散射方法可以经由基于层的渲染和α混合来产生最佳质量。散射方法可能相对慢但准确。例如,散射方法可涉及在每一层模拟源点向输出的扩散。聚集方法可能不那么准确,但可以更快,和/或可以提供更好的图形处理单元(gpu)着色器兼容性。当使用适当的采样和加权策略时,聚集方法可以提供良好的近似。聚集方法可以模拟每个输出像素,并可以(例如,直接)映射到最终图像作为输入像素的加权和。聚集方法可以自动考虑到前景遮蔽问题。
46.在诸如在图14中一般示出的示例性实施例中,逐像素渲染过程(例如,框482)可以包括:对于每个输出像素490(x,y),ecu 324初始化一个或多个累加器,诸如累加器a(x,y)、w(x,y),遍历附近的像素,和/或确定输出值(例如,输出像素490的经修改的版本494)。初始化累加器可包括为每个像素(例如空白图像)的信息指定/分配存储器或其他电子存储装置。
47.采用示例性实施例,遍历附近的像素可以包括识别靠近/邻近输出像素490的位置(x,y)的一个或多个像素492(i,j)(例如,邻居像素)。像素492的位置(i,j)可以相对于输出像素490的位置(x,y)。ecu 324可以获得每个邻居像素492的深度信息z(i,j)和/或光/颜色信息c(i,j)。深度信息z(i,j)可以从深度图410、422和/或模糊半径图462获得。光/颜色信息可以从诸如可与第一电子传感器320一起被包括的光/颜色传感器获得。ecu 324还可以诸如从psf 408的库444获得每个邻居像素492的psf信息。与邻居像素492相关联的深度可以决定使用哪个psf 408,并且邻居像素492的位置可以决定从该psf 408获得什么信息。所获得的psf信息可以包括光强度信息。在一些情况下,psf信息可包括颜色(例如,rgb)强度,因此,psf信息可包括三个值。这种颜色信息可在模拟与相机-镜头组合100/102相关联的色差。
48.在说明性实施例中,ecu 324可以使用所获得的psf信息来创建权重因子w(i,j)。例如,如果所获得的psf信息是单个值(例如,一个强度值),则权重因子w(i,j)可以等于该单个值。如果所获得的psf包括三个值(例如,rgb强度),则权重因子可以包括三个值。ecu 324可以在渲染期间应用混合,这可包括根据深度来调整权重。例如,可以增大从较近的psf确定的权重和/或可以减小从较远的psf确定的权重。
49.采用示例性实施例,ecu 324可以根据像素和邻居像素的相应权重与该像素和邻居像素的光/颜色信息的乘积之和,确定该像素的累加值a(x,y):对于所有i,j(包括(0,0),其对应于像素本身),并且对于每个像素x,y,a(x,y)=∑w(i,j)*c(i,j)。如果权重和光/颜色信息两者都包括三个值,则权重的相应值(rgb)可以与光/颜色信息的相应值(rgb)相乘。如果权重包括一个值,则该值可以与光/颜色信息的每个值相乘。ecu 324可以确定总权重w(x,y)为所有权重w(i,j)之和。ecu 324可以通过将a(x,y)除以w(x,y)来确定像素的所输出/经修改的颜色信息。所输出/经修改的颜色信息可以例如包括像素490及其邻居像素492的颜色信息的加权平均值。逐像素渲染过程(框482)可以诸如按顺序地和/或同时地被应用于图像的每个像素。
50.在一些配置中,系统200可包括默认配置文件,其可以不与特定相机/镜头组合100/102相对应。如果(例如相机100、镜头102、或者其组合的)其他配置文件不可用,系统200可利用默认配置文件,和/或当其他配置文件可用时,系统200可忽略或删除默认配置文件。默认配置文件可以至少最初被存储在移动电子设备300上,诸如在存储器332上。
51.系统200的一个或多个功能可以至少部分地经由移动电子设备300的ecu 324和/或远程服务器400的ecu 446(或者与之相关联的处理器336、448)来执行。ecu 324的一个或多个功能可以至少部分地经由ecu 446来执行,反之亦然。
52.在示例中,ecu(例如ecu 324)可以包括电子控制器和/或包括电子处理器,诸如可编程微处理器和/或微控制器。在实施例中,ecu可以包括例如专用集成电路(asic)。ecu可以包括中央处理单元(cpu)、存储器(例如,非暂时性计算机可读存储介质)和/或输入/输出(i/o)接口。ecu可以被配置为执行各种功能,包括本文中更详细描述的那些功能,并且在软件、硬件和/或其他介质中体现适当的编程指令和/或代码。在实施例中,ecu可以包括多个控制器。在实施例中,ecu可以被连接到显示器,诸如触摸屏显示器。
53.在本文中描述了各种装置、系统和/或方法的各种示例/实施例。阐述了许多具体细节,以提供对在说明书中描述的和附图中显示的示例/实施例的整体结构、功能、制造和使用的彻底理解。然而,本领域技术人员将理解,示例/实施例可以在没有这种具体细节的情况下实践。在其他情况下,众所周知的操作、部件和元件没有被详细描述,以免模糊说明书所描述的示例/实施例。本领域普通技术人员将理解,在本文中描述和图示的示例/实施例是非限制性示例,并因此可以理解,本文中公开的具体结构和功能细节可以是代表性的,并且不一定限制实施例的范围。
54.在整个说明书中提及“示例”、“在示例中”、“采用示例”、“各种实施例”、“采用实施例”、“在实施例中”或“实施例”等意味着结合示例/实施例描述的特定特征、结构或特性被包括在至少一个实施例中。因此,短语“示例”、“在示例中”、“采用示例”、“在各种实施例中”、“采用实施例”、“在实施例中”或“实施例”等在整个说明书中的适当位置出现不一定都是指相同的实施例。此外,特定特征、结构或特性可以以任何合适的方式组合在一个或多个示例/实施例中。因此,结合一个实施例/示例图示或描述的特定特征、结构或特性可以全部或部分地与一个或多个其他实施例/示例的特征、结构、功能和/或特性进行组合,而不受限制,只要这种组合不是不合逻辑或无功能的。此外,在不背离本公开的范围的情况下,可以进行许多修改以使特定情况或材料适应本公开的教导。
55.应当理解的是,对单个元件的引用并不一定是如此限制,并且可以包括一个或多个这种元件。任何方向性的引用(例如,加、减、上、下、向上、向下、左、右、向左、向右、顶部、底部、上方、下方、竖直、水平、顺时针和逆时针)仅用于识别目的以帮助读者理解本公开,而并不产生限制,特别是对示例/实施例的位置、定向或使用而言。
56.接合引用(例如,附接、耦接、连接等)应作广义解释,并且可包括元件连接之间的中间构件、元件之间的相对运动、直接连接、间接连接、固定连接、可移动连接、操作性连接、间接接触、和/或直接接触。因此,接合引用不一定暗示两个元件直接连接/耦接并且彼此之间处于固定的关系。电气部件的连接(如果有的话)可以包括机械连接、电气连接、有线连接、和/或无线连接等等。说明书中“例如”和“诸如”的使用应作广义解释,并且用于提供本公开的实施例的非限制性示例,并且本公开不限于此类示例。“和”和“或”的使用应作广义
解释(例如,应被视为“和/或”)。例如但不限于,“和”的使用不一定需要列出所有元件或特征,并且“或”的使用是包含性的,除非这种构造不合逻辑。
57.虽然在本文中可以结合特定顺序中的一个或多个步骤来描述过程、系统和方法,但应理解,这种方法可以以不同顺序用步骤、同时执行某些步骤、用附加步骤和/或省略某些所描述步骤来实践。
58.在上述描述中包含的或在附图中所示的所有事项应被解释为只是说明性的,而非限制性的。在不背离本公开的情况下,可以对细节或结构进行改变。
59.应理解的是,在本文中描述的计算机/计算设备、电子控制单元(ecu)、系统和/或处理器可以包括本领域已知的常规处理设备,其能够执行被存储在相关联的存储器中的预编程指令,所有预编程指令都根据本文中描述的功能执行。就本文中描述的方法被体现在软件中而言,所产生的软件可以被存储在相关联的存储器中,并且也可以构成用于执行这种方法的手段。这种系统或处理器可以进一步是具有rom、ram、ram和rom的类型,和/或是非易失性和易失性存储器的组合,以使得可以存储任何软件,并且还允许存储和处理动态产生的数据和/或信号。
60.应进一步理解,根据本公开的制品可以包括非暂时性计算机可读存储介质,在该介质上编码有用于实施本文所描述的逻辑和其他功能的计算机程序。计算机程序可包括代码以执行本文所公开的方法中的一个或多个。这种实施例可以被配置为经由一个或多个处理器(诸如被集成到单个系统中的多个处理器、或者被分布在通信网络上并通过该通信网络连接在一起的多个处理器)执行,并且通信网络可以是有线和/或无线的。用于实施结合一个或多个实施例描述的特征中的一个或多个的代码在由处理器执行时使多个晶体管从第一状态改变为第二状态。具体的改变模式(例如,哪些晶体管改变状态,哪些晶体管不改变状态)可以至少部分地由逻辑和/或代码规定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1