一种面向大规模MIMO系统的信号检测方法及系统
一种面向大规模mimo系统的信号检测方法及系统
技术领域
1.本技术涉及移动通信技术领域,具体涉及一种面向大规模mimo系统的信号检测方法及系统。
背景技术:
2.大规模多输入多输出技术(multiple-input multiple-output,mimo)作为多用户通信的解决方案,已经成为5g通信系统的关键技术之一。由于相比传统小规模mimo系统增加了接收端和发送端的天线数目,大规模天线系统在频谱效率、能量效率和连接可靠性方面都具有很大的优势。尽管如此,天线数目的大量增加也使得接收端的信号检测成为一个巨大的挑战。
3.目前的信号检测方法主要分为线性检测和非线性检测。传统的线性检测需要矩阵求逆运算,复杂度较高,为了减小复杂度,现有技术公开了一些基于迭代对矩阵求逆进行近似的方法,例如二阶richardson迭代(sori)和纽曼级数近似(nsa)。然而,随着天线数目的增加,线性检测和它们的近似算法性能都达到了饱和。非线性检测算法相比线性检测往往能够实现更优的检测性能,特别是期望传播(ep)算法可以实现近似最优的检测性能。
4.传统ep算法的每次迭代都需要一个矩阵求逆运算,极高的复杂度给硬件实现带来了困难。现有技术1(x.tan,y.-l.ueng,z.zhang,x.you and c.zhang,“a low complexity massive mimo detection based on approximate expectation propagation,”ieee trans.veh.technol.,vol.68,no.8,pp.7260
–
7272,aug.2019)提出一种近似ep算法(epa),通过重建和近似将ep算法进行简化,同时消除每次迭代时的矩阵求逆,但保留一个初始的矩阵求逆运算。现有技术2(x.tan et al:,“approximate expectation propagation massive mimo detector with weighted neumann-series,”ieee trans.circuits syst.ii:exp.briefs,vol.68,no.2,pp.662
–
666,feb.2021.)提出在epa的基础上提出了epa-wnsa算法,通过加权的纽曼序列(wnsa)的迭代运算来近似初始的矩阵求逆,同时将epa的迭代过程进一步优化,从而减小了复杂度。
5.然而,epa-wnsa算法仍然有一些需要改进的地方,它比较慢的收敛速度不利于高吞吐量的硬件实现,并且算法的初始化部分和所需的除法操作也消耗了大量的计算资源。
技术实现要素:
6.本技术提供一种面向大规模mimo系统的信号检测方法及系统,以实现更快收敛速度和更低复杂度的信号检测。
7.本技术第一方面提供一种面向大规模mimo系统的信号检测方法,包括:
8.获取发送端的天线数目、接收端的天线数目、接收信号、信道矩阵、平均符号能量和噪声方差;
9.根据所述发送端的天线数目和所述接收端的天线数目,确定接收端信号检测器的第一阻尼系数和第二阻尼系数;
10.根据所述接收信号、所述信道矩阵、所述噪声方差、所述平均符号能量和所述第一阻尼系数,确定发送信号后验概率分布的初始均值、逆协方差矩阵和接收信号的匹配滤波输出;
11.根据所述发送信号后验概率分布的初始均值、所述匹配滤波输出、所述逆协方差矩阵、所述第一阻尼系数和所述第二阻尼系数,对发送信号的后验概率分布的均值进行sori迭代,得到完成sori迭代后的发送信号的后验概率分布的均值向量,以及,根据完成sori迭代后的发送信号的后验概率分布的均值向量,确定腔边缘概率服从的高斯分布的初始均值;
12.根据所述逆协方差矩阵得到发送信号的后验概率分布的方差,以及,基于所述后验概率分布的方差和腔边缘概率服从的高斯分布的初始均值,采用epa迭代方法,迭代更新腔边缘概率服从的高斯分布的均值,将达到epa预设迭代次数的腔边缘概率服从的高斯分布的均值作为发送信号的估计值。
13.可选地,所述根据所述发送端的天线数目和所述接收端的天线数目,确定接收端信号检测器的第一阻尼系数和第二阻尼系数,采用以下模型:
[0014][0015]
δ=2/(λ1+λ2);
[0016][0017]
式中,k和n分别为发送端和接收端的天线数目,δ为第一阻尼系数,ω为第二阻尼系数。
[0018]
可选地,所述根据所述接收信号、所述信道矩阵、所述噪声方差、所述平均符号能量和所述第一阻尼系数,确定发送信号后验概率分布的初始均值、逆协方差矩阵和接收信号的匹配滤波输出,包括:
[0019]
根据信道矩阵和噪声方差确定逆协方差矩阵的过程,采用以下模型:
[0020]
w=hhh+diag
′
(λi);
[0021]
式中,w为逆协方差矩阵,h为信道矩阵,diag
′
(
·
)表示以一个向量或者一个矩阵的对角元素构成的对角矩阵,λi为设置参数,i表示发送信号的信号维度即发送端天线的序号,为噪声方差,es为平均符号能量;
[0022]
根据信道矩阵和接收信号确定接收信号的匹配滤波输出的过程,采用以下模型:
[0023][0024]
式中,b为匹配滤波输出,y为接收信号向量;
[0025]
根据匹配滤波输出和第一阻尼系数对后验概率分布的均值初始化,得到后验概率分布的初始均值,所述初始均值包括第一次迭代后验概率分布的均值和第二次迭代后验概率分布的均值,表示为:
[0026]
μ0=0,μ1=δb;
[0027]
其中,μ0为第一次迭代后验概率分布的均值,μ1为第二次迭代后验概率分布的均值。
[0028]
可选地,所述根据所述发送信号后验概率分布的初始均值、所述匹配滤波输出、所
述逆协方差矩阵、所述第一阻尼系数和所述第二阻尼系数,对发送信号的后验概率分布的均值进行sori迭代,得到完成sori迭代后的发送信号的后验概率分布的均值向量,采用以下模型:
[0029][0030]
式中,预设sori迭代次数为l
1-1,则完成sori迭代后的发送信号的后验概率分布的均值向量为
[0031]
可选地,所述根据完成sori迭代后的发送信号的后验概率分布的均值向量,确定腔边缘概率服从的高斯分布的初始均值,采用以下模型:
[0032][0033]
式中,t0为腔边缘概率服从的高斯分布的初始均值。
[0034]
可选地,所述基于所述后验概率分布的方差和腔边缘概率服从的高斯分布的初始均值,采用epa迭代方法,迭代更新腔边缘概率服从的高斯分布的均值,将达到epa预设迭代次数的腔边缘概率服从的高斯分布的均值作为发送信号的估计值,包括:
[0035]
对第i维腔边缘概率服从的高斯分布的均值进行硬判决,得到当前迭代的估计符号向量具体采用以下模型:
[0036][0037]
式中,l2表示当前迭代次数,为星座集θ中的星座点,该星座集θ是由调制阶数和调制方式所确定的,表示在第l2次迭代,使最小时的的取值,为上一次迭代更新的腔边缘概率服从的高斯分布的均值;
[0038]
更新第i维腔边缘概率服从的高斯分布的均值具体采用以下模型:
[0039][0040]
式中,gram(格拉姆)矩阵a=hhh,为第i维后验概率分布的方差,bi为匹配滤波输出的第i行的元素;
[0041]
利用缩放因子β(0<β<1)对进行缩放,具体采用以下模型:
[0042][0043]
预设迭代次数,得到达到预设迭代次数的腔边缘概率服从的高斯分布的均值,以及,以达到预设迭代次数的腔边缘概率服从的高斯分布的均值作为发送信号的估计值。
[0044]
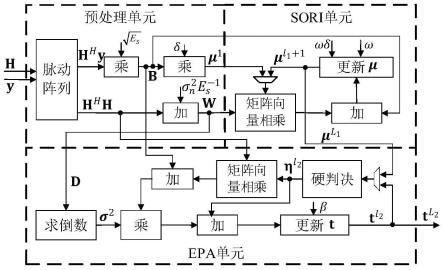
本技术第二方面提供一种面向大规模mimo系统的信号检测系统,用于执行本技术第一方面提供的信号检测方法,包括输入单元、预处理单元、sori单元和epa单元;
[0045]
所述输入单元用于获取发送端的天线数目、接收端的天线数目、接收信号、信道矩阵、平均符号能量和噪声方差,确定接收端信号检测器的第一阻尼系数和第二阻尼系数,将接收信号、信道矩阵、平均符号能量和噪声方差、第一阻尼系数和第二阻尼系数输入至预处理单元、sori单元和epa单元;
[0046]
所述预处理单元用于根据接收信号、信道矩阵、噪声方差、平均符号能量和第一阻
尼系数,确定发送信号的后验概率分布的初始均值和逆协方差矩阵;
[0047]
所述sori单元用于基于sori迭代方法得到完成sori迭代后的发送信号的后验概率分布的均值向量,以及,根据完成sori迭代后的发送信号的近似后验概率分布的均值向量,确定腔边缘概率服从的高斯分布的初始均值;
[0048]
所述epa单元用于基于epa迭代方法和腔边缘概率服从的高斯分布的初始均值,迭代更新腔边缘概率服从的高斯分布的均值,将达到epa预设迭代次数的腔边缘概率服从的高斯分布的均值作为发送信号的估计值。
[0049]
可选地,所述预处理单元配置有基于对角的脉动阵列,所述脉动阵列包括k(k+1)/2个处理单元pe,所述处理单元pe在每个时钟周期处理多组数据;
[0050]
所述脉动阵列用于接收包括信道矩阵h和接收信号向量y的输入数据,输出hhh和hhy;所述处理单元pe包括计算共轭的pe-a单元和pe-a
top
单元、计算hhh的对角部分的pe-b单元和pe-b
top
单元、计算hhy的pe-d单元和pe-b
top
单元以及计算hhh的非对角部分的pe-c单元和pe-d单元;
[0051]
所述脉动阵列采用逆向数据流,所述输入数据从所述脉动阵列的长边输入至所述pe-a单元和所述pe-a
top
单元,得到hh;所述信道矩阵h沿阵列的方向从脉动阵列的长边到脉动阵列一边流动,所述hh从脉动阵列的长边到脉动阵列的另一边流动。
[0052]
可选地,所述预处理单元采用脉动阵列计算矩阵与矩阵或矩阵与向量相乘;
[0053]
所述脉动阵列配置有提前相加模块,用于进行复数乘法运算的前处理,其中,所述复数乘法运算为第一乘数和第二乘数相乘,所述第一乘数表示为a+jb,所述第二乘数表示为c+jd;
[0054]
所述提前相加模块包括第一加法单元和第二加法单元,所述第一加法单元用于计算a+b,所述第二加法单元用于计算c+d;所述提前相加模块用于将所述第一加法单元的输出和所述第二加法单元的输出传递至处理单元pe中。
[0055]
可选地,所述预处理单元采用脉动阵列计算矩阵与矩阵或矩阵与向量相乘;所述脉动阵列配置有四舍五入模块,所述四舍五入模块用于将输入数据进行四舍五入来减小位宽。
[0056]
由以上技术方案可知,本技术提供的面向大规模mimo系统的信号检测方法及系统,将sori和epa算法相结合,利用sori来近似epa算法初始化部分的矩阵求逆,从而大大提高收敛速度,相比epa-wnsa可以减少约50%到67%的迭代次数。其次,通过算法转换降低初始化部分的复杂度,并消除两个迭代之间的除法操作。此外,本技术提供的信号检测系统采用一款高吞吐量的硬件架构,该硬件架构包括基于对角的脉动阵列,该脉动阵列用于计算矩阵与矩阵相乘、矩阵与向量相乘,其中包含三种改进方法,可以任选使用,包括采用逆向数据流,相比其他mimo检测中应用的脉动阵列可以明显减少运算时间;配置提前相加单元,进行复数乘法运算时可以缩短脉动阵列的关键路径;配置四舍五入单元,能够缩小输入数据的比特宽度从而减少硬件资源。
附图说明
[0057]
图1为本技术实施例提供的信号检测系统的结构示意图;
[0058]
图2为本技术实施例提供的预处理单元采用的脉动阵列的结构示意图;
[0059]
图3为本技术实施例提供的信号检测系统的时序安排示意图。
具体实施方式
[0060]
以下将结合附图,对本技术的技术方案进行详细说明。
[0061]
参见图1,本技术提供一种面向大规模mimo系统的信号检测方法,包括步骤s1至步骤s5。
[0062]
s1、获取发送端的天线数目、接收端的天线数目、接收信号、信道矩阵、平均符号能量和噪声方差。
[0063]
在大规模mimo系统的上行链路中,设定发送端和接收端的天线数目分别为k和n,发送信号采用m阶正交幅度调制(m-qam)。假定发送信号的向量表示,即发送信号向量x从星座集θ中取值,平均符号能量为es,接收信号的向量表示,即接收信号向量为y,则mimo系统模型可以表示为y=hx+n,其中h为瑞利平坦衰落信道矩阵,n表示均值为0,方差为的加性高斯白噪声。mimo检测任务是接收端基站中mimo信号检测器根据接收信号y来估计发送信号x。
[0064]
s2、根据所述发送端的天线数目和所述接收端的天线数目,确定接收端信号检测器的第一阻尼系数和第二阻尼系数。
[0065]
在信号接收端,提前根据发送端的天线数目和接收端的天线数目,计算接收端信号检测器所需要的阻尼系数,计算方法为:
[0066][0067]
δ=2/(λ1+λ2);
[0068][0069]
式中,k和n分别为发送端和接收端的天线数目,δ为第一阻尼系数,ω为第二阻尼系数。
[0070]
s3、根据接收信号、信道矩阵、噪声方差、平均符号能量和第一阻尼系数,确定发送信号的后验概率分布的初始均值和逆协方差矩阵。
[0071]
由于在大规模mimo系统中,直接求解每个发送信号向量的后验概率会带来极大的计算复杂度,因此本技术实施例将发送信号向量的后验概率分布近似为一个高斯分布,首先进行预处理运算,确定后验概率的近似高斯分布的初始均值μ和逆协方差矩阵w,为后续的sori迭代和epa迭代提供所需要的变量。
[0072]
在现有技术2的epa-wnsa方法中采用的逆协方差矩阵其中设置参数λi的值为i表示发送信号的信号维度即发送端天线的序号,并对接收信号向量y进行匹配滤波得到匹配滤波输出为
[0073]
本技术实施例为减少乘法运算,将现有技术2中的逆协方差矩阵w扩大将匹配滤波输出b扩大表示为:
[0074][0075]
[0076][0077]
其中,diag
′
(
·
)表示以一个向量或者一个矩阵的对角元素构成的对角矩阵。
[0078]
本技术实施例通过上述转换可以减少4k2的乘法运算。
[0079]
根据匹配滤波输出b和第一阻尼系数δ对后验概率分布的均值μ进行初始化,均值μ在后续的sori迭代中迭代更新,趋于最佳。初始均值包括第一次迭代后验概率分布的均值和第二次迭代后验概率分布的均值,表示为:
[0080]
μ0=0,μ1=δb;
[0081]
其中,μ0为第一次迭代后验概率分布的均值,μ1为第二次迭代后验概率分布的均值。
[0082]
在得到逆协方差矩阵后,通过逆协方差矩阵确定后验概率的近似高斯分布的方差σ2,需要说明的是,确定后验概率的方差的步骤可在得到逆协方差矩阵之后进行,也可以在epa迭代过程的开始进行,在本技术实施例的信号检测方法中计算一次方差即可。根据逆协方差矩阵w的对角构成的对角矩阵d可以得到后验概率分布的方差为:
[0083]
σ2=diag(d-1
);
[0084]
s4、基于sori迭代方法得到完成sori迭代后的发送信号的后验概率分布的均值向量,以及,根据完成sori迭代后的发送信号的近似后验概率分布的均值向量,确定腔边缘概率服从的高斯分布的初始均值。
[0085]
现有技术2的epa-wnsa方法中采用wnsa迭代,本技术实施例采用sori迭代取代wnsa迭代,首先根据发送信号后验概率分布的初始均值、所述匹配滤波输出、所述逆协方差矩阵、所述第一阻尼系数和所述第二阻尼系数,对发送信号的后验概率分布的均值进行sori迭代,得到完成sori迭代后的发送信号的后验概率分布的均值向量,采用如下模型:
[0086][0087]
预设sori迭代次数为l
1-1,则迭代结果为
[0088]
在得到完成sori迭代后的发送信号的后验概率分布的均值向量之后,确定腔边缘概率服从的高斯分布的初始均值。在现有技术2的epa-wnsa方法中,将腔边缘概率服从的高斯分布的均值t初始化为(diag(
·
)表示一个矩阵的对角元素构成的向量),在本技术实施例中通过步骤s2的改进可以得到由于噪声的方差diag(d-1
)
→
1/n,可以推导出随着es和snr的增大无限趋近于0。因此本技术实施例提出将t0近似为表示为:
[0089][0090]
通过上式的操作可以减少2k的除法,2k乘法和2k的加法运算。
[0091]
s5、基于epa迭代方法和腔边缘概率服从的高斯分布的初始均值,迭代更新腔边缘概率服从的高斯分布的均值,将达到epa预设迭代次数的腔边缘概率服从的高斯分布的均值作为发送信号的估计值。
[0092]
预设epa的迭代次数为l2,对于i=1,...,k的k个发送端天线序号,可以同时进行以下迭代过程,也可以分批进行:
[0093]
s501、对第i维腔边缘概率服从的高斯分布的均值进行硬判决,得到当前迭代
的估计符号向量
[0094][0095]
其中,l2表示当前迭代次数,为星座集θ中的星座点,该星座集θ是由调制阶数和调制方式所确定的,表示在第l2次迭代,使最小时的的取值,为上一次迭代更新的腔边缘概率服从的高斯分布的均值。
[0096]
s502、更新第i维腔边缘概率服从的高斯分布的均值
[0097][0098]
其中,gram(格拉姆)矩阵a=hhh,为第i维后验概率分布的方差,bi为匹配滤波输出的第i行的元素。
[0099]
s503、利用缩放因子β(0<β<1)对进行缩放,以加速收敛。
[0100][0101]
在l2次迭代之后,得到即为最终得到的对发送信号向量x的软信息的估计。
[0102]
本技术实施例还提供一种面向大规模mimo系统的信号检测系统,用于执行本技术实施例前述提供的信号检测方法,该信号检测系统包括输入单元、预处理单元、sori单元和epa单元。
[0103]
该输入单元用于获取发送端的天线数目、接收端的天线数目、接收信号、信道矩阵、平均符号能量和噪声方差,确定接收端信号检测器的第一阻尼系数和第二阻尼系数,将接收信号、信道矩阵、平均符号能量和噪声方差、第一阻尼系数和第二阻尼系数输入至信号检测系统的其他单元。
[0104]
该预处理单元用于根据接收信号、信道矩阵、噪声方差、平均符号能量和第一阻尼系数,确定发送信号的后验概率分布的初始均值和逆协方差矩阵。
[0105]
该sori单元用于基于sori迭代方法得到完成sori迭代后的发送信号的后验概率分布的均值向量,以及,根据完成sori迭代后的发送信号的近似后验概率分布的均值向量,确定腔边缘概率服从的高斯分布的初始均值。
[0106]
该epa单元用于基于epa迭代方法和腔边缘概率服从的高斯分布的初始均值,迭代更新腔边缘概率服从的高斯分布的均值,将达到epa预设迭代次数的腔边缘概率服从的高斯分布的均值作为发送信号的估计值。
[0107]
在一部分优选实施例中,该预处理单元采用基于对角的脉动阵列来计算hhh和hhy。本技术提出三种针对基于对角的脉动阵列的改进方法,用于计算矩阵与矩阵相乘、矩阵与向量相乘,可以任选使用,也可以组合使用。
[0108]
(1)第一种改进方法为脉动阵列采用逆向数据流,相比其他mimo检测中应用的脉动阵列可以明显减少运算时间。
[0109]
该脉动阵列采用并行的方式进行数据处理,包括k(k+1)/2个处理单元pe,处理单元pe在每个时钟周期处理多组数据,假设并行度为p,则每个处理单元pe在每个时钟周期处
理p组数据。
[0110]
所述脉动阵列用于接收包括信道矩阵h和接收信号向量y的输入数据,输出hhh和hhy;所述处理单元pe包括计算共轭的pe-a单元和pe-a
top
单元、计算hhh的对角部分的pe-b单元和pe-b
top
单元、计算hhy的pe-d单元和pe-b
top
单元以及计算hhh的非对角部分的pe-c单元和pe-d单元;该脉动阵列采用与其他mimo检测中应用的脉动阵列相反的数据流动方向,所述输入数据从所述脉动阵列的长边输入至所述pe-a单元和所述pe-a
top
单元,得到hh;所述信道矩阵h沿阵列的方向从脉动阵列的长边到脉动阵列一边流动,所述hh从脉动阵列的长边到脉动阵列的另一边流动。
[0111]
通过这样的方式,矩阵与矩阵相乘的运算时间减少到n/p+k+1,相比之下其他mimo检测中应用的脉动阵列需要的处理时间高达n/p+2k-1。
[0112]
(2)第二种改进方法为脉动阵列配置提前相加单元,进行复数乘法运算时可以缩短脉动阵列的关键路径。
[0113]
预处理单元采用脉动阵列计算矩阵与矩阵或矩阵与向量相乘,所述脉动阵列配置有提前相加模块,用于进行复数乘法运算的前处理,其中,所述复数乘法运算为第一乘数和第二乘数相乘,所述第一乘数表示为a+jb,所述第二乘数表示为c+jd;
[0114]
所述提前相加模块包括第一加法单元和第二加法单元,所述第一加法单元用于计算a+b,所述第二加法单元用于计算c+d;所述提前相加模块用于将所述第一加法单元的输出和所述第二加法单元的输出传递至处理单元pe中。
[0115]
由于第一乘数和第二乘数的复数乘法可以转化为:
[0116]
(a+jb)(c+jd)=ac-bd+j[(a+b)(c+d)-(ac+bd)];
[0117]
为了缩短关键路径,配置第一加法单元和第二加法单元,再将计算结果和a,b,c,d一起传递到处理单元pe中,通过该方法可以将脉动阵列的关键路径减少一个加法,同时只有可以忽略的硬件面积增加。
[0118]
(3)第三种改进方法为脉动阵列配置四舍五入单元,能够缩小输入数据的比特宽度从而减少硬件资源。
[0119]
预处理单元采用脉动阵列计算矩阵与矩阵或矩阵与向量相乘,所述脉动阵列配置有四舍五入模块,所述四舍五入模块用于将输入数据进行四舍五入来减小位宽,可以明显缩短脉动阵列的关键路径,降低复杂度,同时仍然保持了良好的检测性能。
[0120]
在另一部分优选实施例中,sori单元和epa单元中的矩阵向量相乘的运算可采用部分并行的方式,每个时钟周期将矩阵的f列与向量的f个元素相乘,重复多次即可完成整个运算。
[0121]
在另一部分优选实施例中,epa单元的运算中采用简化的硬判决方法,其具有低复杂度和低延时的特性,主要应用于未归一化的符号的硬判决。如表1所示,简化的硬判决方法为:假设(二进制表示)为待判决符号的实部或虚部的符号位和整数位,通过判决符号位和最高整数位来进行溢出保护,当和分别为0和1时,判决结果为当二者分别为1和0时,判决结果为当最低整数位b0为0时,判决结果为b+1,为1时判决结果为b。该简化的硬判决方法仅需要判决三个比特,对比之下传统的硬判决方法需要个加法,次取绝对值操作和级的
比较操作。
[0122]
表1简化的硬判决方法
[0123][0124]
以下实施例将进一步说明本技术。
[0125]
实施例1
[0126]
参见图1,本技术实施例中信号检测系统的架构以k=32,n=128为例进行实现,该架构可支持qpsk到256-qam多种调制。
[0127]
本技术实施例提供的信号检测系统包括输入单元、预处理单元、sori单元和epa单元,参见图2,本技术实施例在预处理单元采用基于对角的脉动阵列来计算hhh和hhy。基于对角的脉动阵列采用二并行的方式,每个处理单元pe在每个时钟周期处理2组数据。处理单元pe-a和pe-a
top
中配置了计算共轭的功能,将h输入其中,即可运算得到其共轭转置hh。处理单元pe-b和pe-b
top
用来计算hhh的对角部分,hhy由处理单元pe-d和pe-b
top
计算得到。hhh的非对角部分由处理单元pe-c和pe-d运算得到。
[0128]
该脉动阵列采用与其他mimo信号检测器中使用的脉动阵列相反的数据流动方向,h、y从脉动阵列的长边输入到预处理单元pe-a和pe-a
top
中,经过预处理单元处理之后得到hh,之后h从上到下流动,hh从右到左流动。通过这样的方式,hhh、hhy的运算时间仅仅为n/2+k+1=97,对比之下其他mimo信号检测器中使用的脉动阵列需要的运算时间为n/2+2k-1=127。
[0129]
此外,在预处理单元添加提前相加模块来缩短脉动阵列的关键路径,复数乘法的计算可以转化为:
[0130]
(a+jb)(c+jd)=ac-bd+j[(a+b)(c+d)-(ac+bd)];
[0131]
为了减小关键路径,在预处理单元先计算a+b和c+d,即先将h,y及hh的实部与虚部相加,再将计算结果和输入数据一起传递到下一个运算单元,通过该方法可以将关键路径减少一个加法。
[0132]
为了进一步减小硬件复杂度,在预处理单元添加四舍五入模块。具体操作为:将输入数据进行四舍五入操作来减小位宽。通过四舍五入,h和hh的位宽从9比特减小到8比特,y的位宽从11比特减小到10比特。此外,为了减小位宽缩减带来的性能损失,在hhh的计算结果中添加了0.0625的补偿项。通过以上方法可以明显缩短脉动阵列的关键路径,降低复杂度,同时仍然保持了良好的检测性能。
[0133]
sori单元和epa单元迭代中的矩阵向量相乘的运算采用部分并行的方式。在sori单元,每个时钟周期将逆协方差矩阵w的3列与后验概率分布的均值的估计的3个元素相
乘,因此,通过11个时钟周期的计算即可得到。在epa单元,每个时钟周期将gram(格拉姆)矩阵a的2列与硬判决后的符号向量的2个元素相乘,经过16个时钟周期的计算可以得到
[0134]
进一步地,实施例1中得到的为未归一化的符号,因此在epa的迭代中还采用简化的硬判决方法,具体为:假设(二进制表示)为的实部或虚部的符号位和整数位,通过判决符号位和最高整数位来进行溢出保护,当和分别为0和1时,判决结果为当二者分别为1和0时,判决结果为当最低整数位b0为0时,判决结果为b+1,为1时判决结果为b。
[0135]
进一步地,为了充分利用硬件资源,提高吞吐量,本技术实施例的架构采用overlap(重叠)结构,向脉动阵列中不断输入数据。参见图3,当一帧的数据向脉动阵列输入完毕,立即进行下一帧的输入。在256-qam时,sori和epa单元分别需要4次和3次迭代。通过该结构,每隔n/p=64个时钟周期,就会得到一帧的计算结果。
[0136]
为了评估实施例1设计的可行性和性能,硬件设计使用systemverilog实现,利用design compiler在台积电tsmc 28nm工艺下进行综合,并利用integrated circuit(ic)编译器进行布局布线,功耗由primetime px在平均模式下进行评估。最终本技术实施例提出的epa-sori检测器相比先前最优的检测器epa-wnsa实现了更高的吞吐量,面积效率,和能量效率,其中吞吐量达到了2.2倍,面积效率达到了1.36倍。
[0137]
其他具体细节可参照本技术实施例前述的信号检测方法,在此不再赘述。
[0138]
由以上技术方案可知,本技术实施例提供一种面向大规模mimo系统的信号检测方法及系统,将现有的sori方法与epa-wnsa方法进行结合,利用sori来近似epa算法初始化部分的矩阵求逆,在保证了良好的检测性能的同时减少了mimo信号检测所需要的迭代次数;将预处理部分的变量转换为新的计算方式,即省略了其中的部分乘法运算,从而可以减少4k2的乘法运算,降低了复杂度;在sori迭代和epa迭代之间的数据传递过程中,经过算法推导将t0近似为消除了部分除法、乘法和加法运算,进一步降低了算法复杂度。
[0139]
进一步地,本技术实施例在信号检测系统的预处理单元还采用脉动阵列,用于计算矩阵与矩阵相乘、矩阵与向量相乘。该脉动阵列可以采用逆向数据流,相比其他mimo检测中应用的脉动阵列可以明显减少运算时间,还可以配置提前相加单元,进行复数乘法运算时可以缩短脉动阵列的关键路径,还可以配置四舍五入单元,能够缩小输入数据的比特宽度从而减少硬件资源。
[0140]
进一步地,本技术实施例在epa迭代单元还提出一种简化的硬判决方法,具有低复杂度、低延时的特性。
[0141]
综上,本技术实施例提出的信号检测方法及系统与之前的epa-wnsa方法相比,迭代次数更少,更有利于高吞吐量的硬件实现,性能可以达到相同甚至更优,同时信号检测系统的硬件架构使得实现的吞吐量更高,面积效率和能量效率也更高。
[0142]
以上所述的本技术实施方式并不构成对本技术保护范围的限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1