一种多级中继卫星星座行星际导航的方法、系统及设备
1.本公开涉及卫星导航领域,尤其是涉及一种用多级卫星组成中继星座实现行星际卫星导航的方法、系统及设备,用于地球至太阳之间的行星际卫星导航。
背景技术:
2.目前gps、格洛纳斯、伽利略、北斗等全球导航定位系统对地球表面、近地球目标的导航定位已经是较为成熟的技术。对地球轨道外太阳系内太阳、行星、小行星的行星际深空探测是各个航天大国发展的方向,相关的行星际深空探测技术是各国发展的热点。对行星际探测器的导航定位是深空探测的关键技术之一。我国专利文献cn100501331c、cn108494472a、cn111536980b等都做了相关研发,拥有了相关的技术。但是目前尚没有适用于地球至太阳之间的利用多级中继卫星实现行星际卫星导航定位的方法和系统。
技术实现要素:
3.本公开的主要目的在于提供一种多级中继卫星星座实现行星际卫星导航定位的方法和系统,用于解决上述技术问题的至少之一。
4.为了实现上述目的,本公开一方面提出一种多级中继卫星星座行星际导航方法,包括:
5.地球轨道卫星组成第一级中继卫星星座,地球与月球引力系统平动点设定区域轨道上的卫星以及地球与太阳引力系统平动点设定区域轨道上的卫星组成第二级中继卫星星座,地球与太阳引力系统平动点设定区域轨道上的卫星以及绕地球的晕(halo)轨道卫星组成第三级中继卫星星座;第一、二、三级中继卫星星座,每一级中继卫星星座至少有四颗卫星组成;卫星地面站对第一级中继卫星定轨;第一级中继卫星根据接收的第二级中继卫星的测量数据,通过星载计算部件对第二级中继卫星定轨,第二级中继卫星根据接收的第三级中继卫星的测量数据,通过星载计算部件对第三级中继卫星定轨;第三级中继卫星接收第二级中继卫星的测量数据,通过星载计算部件对第二级中继卫星定轨,第二级中继卫星接收第一级中继卫星的测量数据,通过星载计算部件对第一级中继卫星定轨;由于第一级和第三级张角太小,第一级对第三级或者第三级对第一级的定轨不容易实现,因此需要布设第二级卫星作为中继星座。本发明利用第一、二、三级中继卫星组成星座对行星际卫星导航。行星际卫星从地球发射后,到达第一级中继卫星的覆盖范围时,接收第一级中继卫星的导航信号,利用第一级中继卫星对进入其覆盖范围内的所述行星际卫星定位导航;当所述行星际卫星到达第二级中继卫星的覆盖范围时,接收第二级中继卫星的导航信号,利用第二级中继卫星对进入其覆盖范围内的所述星际卫星进行定位导航;当所述行星际卫星到达第三级中继卫星的覆盖范围时,接收第三级中继卫星的导航信号,利用第三级中继卫星对进入其覆盖范围内的所述星际卫星进行定位导航;各级中继卫星通信数据和所述行星际卫星的通信数据经卫星通信部件与所述卫星地面站通信或与各级中继卫星通信。
6.可选地,第一级中继卫星为地球同步轨道卫星。
7.可选地,地球与月球引力系统平动点设定区域轨道上的第二级中继卫星,其中,所述平动点为地球—月球拉格朗日第四点、第五点、第二点;地球与太阳引力系统平动点设定区域轨道上的第二级中继卫星,其平动点为地球—太阳拉格朗日第一点、第二点。其中,卫星轨道为在各平动点附近的晕(halo)轨道。
8.可选地,地球与太阳引力系统平动点设定区域轨道上的第三级中继卫星,其中平动点为地球—太阳拉格朗日第四点、第五点;绕地球的晕(halo)轨道为晕轨道半径小于0.2倍日地距离(0.2au),晕轨道面为不平行于黄道面的卫星轨道。
9.本公开另一方面提出了一种多级中继卫星星座行星际导航的系统,包括:
10.第一、二、三级中继卫星组成的行星际导航星座,每一级中继卫星星座至少有四颗卫星组成;地球轨道卫星组成第一级中继卫星星座,地球与月球引力系统平动点设定区域轨道上的卫星以及地球与太阳引力系统平动点设定区域轨道上的卫星组成第二级中继卫星星座,地球与太阳引力系统平动点设定区域轨道上的卫星以及绕地球的晕(halo)轨道卫星组成第三级中继卫星星座;卫星地面站,用于对第一级中继卫星导航;第一级中继卫星对第二级中继卫星导航,第二级中继卫星对第三级中继卫星导航;第三级中继卫星对第二级中继卫星导航,第二级中继卫星对第一级中继卫星导航;第一、二、三级中继卫星对行星际卫星导航。
11.可选地,第一级中继卫星为地球同步轨道卫星。
12.可选地,地球与月球引力系统平动点设定区域轨道上的第二级中继卫星,其中平动点为地球—月球拉格朗日第四点、第五点、第二点;地球与太阳引力系统平动点设定区域轨道上的第二级中继卫星,其中平动点为地球—太阳拉格朗日第一点、第二点;卫星轨道为在各平动点附近的晕(halo)轨道。
13.可选地,地球与太阳引力系统平动点设定区域轨道上的第三级中继卫星,其中平动点为地球—太阳拉格朗日第四点、第五点;绕地球的晕(halo)轨道为晕轨道半径小于0.2倍日地距离(0.2au),晕轨道面不平行于黄道面的卫星轨道。
14.本公开的又一方面提出了一种计算机设备,包括存储器及处理器,存储器上存储有可在处理器上运行的计算机程序,其特征在于,处理器执行计算机程序时实现上述多级中继卫星行星际导航的方法的步骤。
15.可选地,经计算设备计算处理的卫星导航信号通过地面站向各级中继卫星和行星际卫星发射,各级中继卫星星历和行星际卫星星历数据经卫星通信部件向地面站发射,地面站接收星历数据经计算设备进行计算处理。
16.可选地,经计算设备计算处理的卫星导航信号通过卫星通信部件向各级中继卫星和行星际卫星发射,各级中继卫星星历和行星际卫星星历数据经卫星通信部件向各级中继卫星和行星际卫星发射,卫星接收星历数据经计算设备进行计算处理。
17.有益效果:
18.本公开提出的一种多级中继卫星星座行星际导航的方法,该方法通过选择太阳系各系统之间的平动点设定区域轨道上,建立多级中继卫星组成导航定位星座。在多级中继卫星星座之间互相确定中继卫星的轨道,进而通过多级中继卫星实现行星际深空探测卫星的导航定位。该方法以平动点设定区域的轨道为基础,组建较为稳定的导航定位星座,用较少的卫星实现地球至太阳的行星际探测卫星导航,能大幅度节省时间和投入。
附图说明
19.图1a示出了第一级中继卫星星座示意图。
20.图1b示出了第二级中继卫星星座示意图。
21.图1c示出了第三级中继卫星星座示意图。
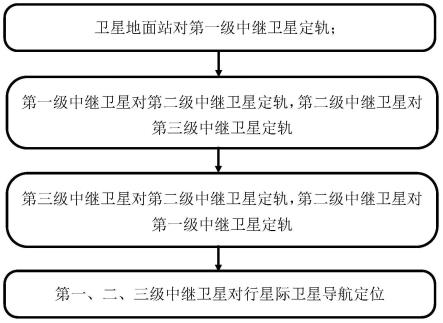
22.图2示意性示出了本公开实施例中导航方法流程图。
23.图3示意性示出了本公开另一实施例的计算机设备的框图。
具体实施方式
24.为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体细节,并参照附图,对本公开进一步详细说明。
25.对行星际探测器的导航定位是深空探测的关键技术之一,目前尚缺乏适用于地球至太阳之间的布设多级中继卫星实现行星际卫星导航定位的方法。基于此,本公开提供一种行星际卫星导航的方法。
26.图1示出了本公开多级中继卫星行星际导航的方法的实现系统示意图,如图1所示,多级中继卫星行星际导航的系统包括三级中继卫星星座。如图1a所示,地球轨道卫星组成第一级中继卫星星座,第一级中继卫星为地球同步轨道卫星。如图1b所示,地球与月球引力系统平动点设定区域轨道上的卫星以及地球与太阳引力系统平动点设定区域轨道上的卫星组成第二级中继卫星星座,第二级中继卫星部分位于地球与月球引力系统平动点附近晕(halo)轨道上,该平动点为地球—月球拉格朗日第四点、第五点、第二点。第二级中继卫星部分位于地球与太阳引力系统平动点附近晕(halo)轨道上,该平动点为地球—太阳拉格朗日第一点、第二点。如图1c所示,地球与太阳引力系统平动点设定区域轨道上的卫星以及绕地球的晕(halo)轨道卫星组成第三级中继卫星星座,第三级中继卫星部分位于地球与太阳引力系统平动点设定区域的晕(halo)轨道上,该平动点为地球—太阳拉格朗日第四点、第五点,第三级中继卫星部分位于绕地球的晕(halo)轨道为晕轨道半径小于0.2倍日地距离(0.2au)的轨道上,优选的该晕轨道面垂直于黄道面。
27.图2示意性示出了本公开实施例中导航方法流程图。如图2所示,利用多级中继卫星实现行星际卫星导航定位的方法包括:
28.卫星地面站对第一级中继卫星定轨;第一级中继卫星对第二级中继卫星定轨,第二级中继卫星对第三级中继卫星定轨;第三级中继卫星对第二级中继卫星定轨,第二级中继卫星对第一级中继卫星定轨;第一、二、三级中继卫星对行星际卫星导航定位。
29.图3示意性示出了根据本公开实施例的适于实现上文描述的多级中继卫星星座行星际导航的方法的计算机设备的框图。本领域技术人员可以理解,图3中示出的结构,仅仅是与本公开实施例相关的部分结构的框图,并不构成对本公开实施例所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
30.如图3所示,该计算机设备300包括存储器310及处理器320。该计算机设备300可以执行根据本公开实施例的方法。
31.具体地,处理器320例如可以包括通用微处理器、指令集处理器和/或相关芯片组和/或专用微处理器(例如,专用集成电路(asic)),等等。处理器320还可以包括用于缓存用
途的板载存储器。处理器320可以是用于执行根据本公开实施例的方法流程的不同动作的单一处理单元或者是多个处理单元。
32.该计算机设备的存储器310,例如可以是非易失性的计算机可读存储介质,具体示例包括但不限于:磁存储装置,如磁带或硬盘(hdd);光存储装置,如光盘(cd-rom);存储器,如随机存取存储器(ram)或闪存;等等。
33.存储器310可以包括计算机程序311,该计算机程序311可以包括代码/计算机可执行指令,其在由处理器320执行时使得处理器320执行根据本公开实施例的方法或其任何变形。
34.计算机程序311可被配置为具有例如包括计算机程序模块的计算机程序代码。例如,在示例实施例中,计算机程序311中的代码可以包括一个或多个程序模块,例如包括311a、模块311b、
……
。应当注意,模块的划分方式和个数并不是固定的,本领域技术人员可以根据实际情况使用合适的程序模块或程序模块组合,当这些程序模块组合被处理器320执行时,使得处理器320可以执行根据本公开实施例的方法或其任何变形。
35.本公开还提供了一种计算机可读存储介质,该计算机可读存储介质可以是上述实施例中描述的设备/装置/系统中所包含的;也可以是单独存在,而未装配入该设备/装置/系统中。上述计算机可读存储介质承载有一个或者多个程序,当上述一个或者多个程序被执行时,实现根据本公开实施例的方法。
36.根据本公开的实施例,计算机可读存储介质可以是非易失性的计算机可读存储介质,例如可以包括但不限于:便携式计算机磁盘、硬盘、随机访问存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本公开中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
37.附图中的流程图和框图,图示了按照本公开各种实施例的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框可以代表一个模块、程序段、或代码的一部分,上述模块、程序段、或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个接连地表示的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图或流程图中的每个方框、以及框图或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
38.以上的实施例仅仅是对本公开的优选实施方式进行描述,并非对本公开的范围进行限定,在不脱离本公开设计精神的前提下,本领域普通技术人员对本公开的技术方案作出的各种变形和改进,均应落入本公开权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1