像素阵列、摄像元件和电子设备的制作方法
像素阵列、摄像元件和电子设备
1.本技术是申请日为2018年11月12日、发明名称为“固态摄像元件和电子设备”的申请号为201880074140.x的专利申请的分案申请。
技术领域
2.本技术涉及固态摄像元件和电子设备,更特别地,涉及被构造成能够同时获得用于生成高动态范围图像的信号和用于检测相位差的信号的固态摄像元件和电子设备。
背景技术:
3.人们已经提出了一种固态摄像元件,其实现了同时获得用于生成高动态范围图像(在下文中也被称为hdr图像)的高灵敏度信号和低灵敏度信号这两种像素信号和获得用于测距的相位差检测信号(例如,参见专利文献1)。
4.引用列表
5.专利文献
6.专利文献1:日本专利申请公开第2016-171308号
技术实现要素:
7.本发明要解决的问题
8.在专利文献1的像素结构中,在一个片上透镜下方形成有三个光电二极管。如果专门为了相位差特性而增大片上透镜的曲率以增大屈光力来提高角度依赖性,则变得难以生成hdr图像。相反,如果专门为了hdr图像的有利生成而减小片上透镜的曲率以减小屈光力来降低角度依赖性,则相位差特性的分离度会劣化。因此,难以同时实现相位差特性和hdr特性。人们还提出了一种其中改变一个片上透镜的曲率的透镜结构,但是该透镜结构对形状的变化敏感,因此难以大量生产。
9.本技术是鉴于这种情况而被做出的,并且本技术旨在能够同时获得用于生成高动态范围图像的信号和用于检测相位差的信号。
10.解决问题的技术方案
11.根据本技术的第一方面的固态摄像元件包括与多种颜色对应的多个像素集,各个所述像素集包括具有相同颜色的滤色器的多个像素,并且各个所述像素包括多个光电转换部。
12.根据本技术的第二方面的电子设备包括固态摄像元件,所述固态摄像元件包括与多种颜色对应的多个像素集,各个所述像素集包括具有相同颜色的滤色器的多个像素,并且各个所述像素包括多个光电转换部。
13.在本技术的第一方面和第二方面中,与多种颜色对应地设置多个像素集,各个像素集设置有具有相同颜色的滤色器的多个像素,并且各个像素设置有多个光电转换部。
14.固态摄像元件和电子设备可以是独立的装置,或者可以是并入到其他装置中的模块。
15.本发明的效果
16.根据本技术的第一方面和第二方面,可以同时获得用于生成高动态范围图像的信号和用于检测相位差的信号。
17.需要注意,这里描述的效果不一定是限制性的,并且可以包括本发明中描述的任何效果。
附图说明
18.图1是图示了应用本技术的固态摄像元件的示意性构造的图。
19.图2是图示了图1中的固态摄像元件的像素阵列的第一截面构造示例的图。
20.图3是图示了滤色器的颜色阵列的图。
21.图4是图示了像素集的电路构造的图。
22.图5是图示了用于控制像素集的传输晶体管的信号线的构造的图。
23.图6是图示了在固态摄像元件以全分辨率模式操作的情况下的驱动的图。
24.图7是图示了全分辨率模式的变形例的图。
25.图8是图示了在固态摄像元件以四像素相加相位差检测模式操作的情况下的驱动的图。
26.图9是图示了在固态摄像元件以第一相位差hdr模式操作的情况下的驱动的图。
27.图10是图示了在第一相位差hdr模式下读取像素信号的过程的图。
28.图11是图示了在固态摄像元件以第二相位差hdr模式操作的情况下的驱动的图。
29.图12是图示了在第二相位差hdr模式下读取像素信号的过程的图。
30.图13是图示了专用于第一相位差hdr模式的信号线的布线示例的图。
31.图14是图示了专用于第二相位差hdr模式的信号线的布线示例的图。
32.图15是图示了滤色器的颜色阵列的变形例的图。
33.图16是图示了光电二极管pd的布置方向的变形例的图。
34.图17是图示了片上透镜的布置的变形例的图。
35.图18是图示了图1中的固态摄像元件的像素阵列的第二截面构造示例的图。
36.图19是图示了形成有图18中的绝缘层的区域的平面图。
37.图20是图示了图1中的固态摄像元件的像素阵列的第三截面构造示例的图。
38.图21是图示了形成有图18中的绝缘层和杂质层的区域的平面图。
39.图22是图示了图21中的杂质层的电位的图。
40.图23是图示了图20中的第三截面构造示例的变形例的图。
41.图24是图示了遮光膜被布置在光电二极管pd上的第一构造的平面图。
42.图25是图示了遮光膜被布置在光电二极管pd上的第二构造的平面图。
43.图26是图示了遮光膜被布置在光电二极管pd上的第三构造的平面图。
44.图27是图示了遮光膜被布置在光电二极管pd上的第四构造的平面图。
45.图28是图示了图1中的固态摄像元件的另一变形例的图。
46.图29是图示了图1中的固态摄像元件的又一变形例的图。
47.图30是图示了像素晶体管的布置示例的平面图。
48.图31是图示了作为应用本技术的电子设备的摄像装置的构造示例的框图。
49.图32是图示了图像传感器的使用示例的图。
50.图33是图示了内窥镜手术系统的示意性构造的示例的图。
51.图34是图示了摄像头和ccu的功能构造的示例的框图。
52.图35是图示了车辆控制系统的示意性构造的示例的框图。
53.图36是图示了车外信息检测单元和摄像单元的安装位置的示例的说明图。
具体实施方式
54.在下文中,将描述用于实施本技术的方式(在下文中被称为实施例)。需要注意,将按照以下顺序进行描述。
55.1.固态摄像元件的示意性构造示例
56.2.像素的第一截面构造示例
57.3.滤色器的布置示例
58.4.像素集的电路构造示例
59.5.输出模式的说明
60.6.滤色器的颜色阵列的变形例
61.7.光电二极管的布置方向的变形例
62.8.片上透镜布置的变形例
63.9.像素的第二截面构造示例
64.10.像素的第三截面构造示例
65.11.添加遮光膜的构造示例
66.12.其他变形例
67.13.像素晶体管的布置示例
68.14.电子设备的应用示例
69.15.内窥镜手术系统的应用示例
70.16.移动体的应用示例
71.《1.固态摄像元件的示意性构造示例》
72.图1图示了应用本技术的固态摄像元件的示意性构造。
73.图1的固态摄像元件1在使用例如硅(si)作为半导体的半导体基板12上包括像素阵列3和像素阵列3周围的外围电路,像素阵列3具有以矩阵形式二维排列的像素2。外围电路包括垂直驱动电路4、列信号处理电路5、水平驱动电路6、输出电路7和控制电路8等。
74.像素2均包括作为光电转换部的光电二极管和多个像素晶体管。需要注意,如稍后参照图4所述,像素2以如下的共用型像素结构形成:其中,在多个像素2之间共用作为用于保持在光电二极管中生成的电荷的电荷保持部的浮动扩散部。在共用型像素结构中,针对各个像素设置光电二极管和传输晶体管,并且多个像素共用选择晶体管、复位晶体管和放大晶体管。
75.控制电路8接收输入时钟和指示操作模式等的数据,并且输出诸如固态摄像元件1的内部信息等的数据。具体地,控制电路8基于垂直同步信号、水平同步信号和主时钟来生成时钟信号和控制信号,垂直驱动电路4、列信号处理电路5和水平驱动电路6等基于时钟信号和控制信号操作。然后,控制电路8将生成的时钟信号和控制信号输出到垂直驱动电路4、
列信号处理电路5和水平驱动电路6等。
76.垂直驱动电路4例如由移位寄存器形成,并且垂直驱动电路4选择预定的像素驱动线10,向被选的像素驱动线10提供用于驱动像素2的脉冲,并且逐行驱动像素2。即,垂直驱动电路4进行控制以在垂直方向上逐行顺序地选择性扫描像素阵列3的像素2,并且通过垂直信号线9将基于在像素2的光电转换部中生成的与接收的光量对应的信号电荷的像素信号输出到列信号处理电路5。
77.列信号处理电路5针对像素2的对应列被布置,并且针对对应的像素列对从一行中的像素2输出的信号进行诸如噪声消除等的信号处理。例如,列信号处理电路5进行诸如用于消除像素特有的固定模式噪声的相关双采样(cds:correlated double sampling)和ad转换等的信号处理。
78.水平驱动电路6例如由移位寄存器形成,通过顺序地输出水平扫描脉冲来依次选择各个列信号处理电路5,并且使各个列信号处理电路5将像素信号输出到水平信号线11。
79.输出电路7对通过水平信号线11从各个列信号处理电路5顺序地提供的信号进行预定的信号处理,并且输出该信号。例如,输出电路7可以仅进行缓冲,或者可以进行诸如黑电平调节和列变化校正等的各种数字信号处理。输入输出端子13与外部交换信号。
80.如上所述形成的固态摄像元件1是被称为列ad系统的cmos图像传感器,在该列ad系统中,针对对应的像素列布置用于进行cds处理和ad转换处理的列信号处理电路5。
81.此外,固态摄像元件1可以由其中堆叠有多个基板的堆叠结构的芯片形成。通过从下向上依次堆叠下基板和上基板来形成堆叠有多个基板的芯片。控制电路8、垂直驱动电路4、列信号处理电路5、水平驱动电路6和输出电路7中的至少一者或多者被形成在下基板上,并且至少像素阵列3被形成在上基板上。连接部将垂直驱动电路4连接到像素阵列3,并且将列信号处理电路5连接到像素阵列3,以便在下基板和上基板之间传输信号。连接部例如通过硅通孔(tsv:through silicon via)或cu-cu等形成。
82.《2.像素的第一截面构造示例》
83.图2是图示了图1中的固态摄像元件1的像素阵列3的第一截面构造示例的图。
84.在固态摄像元件1的像素阵列3中,光电二极管pd是通过例如在半导体基板12的p型(第一导电类型)半导体区域31中形成n型(第二导电类型)半导体区域32而被形成的。在像素阵列3的各个像素2中,每个像素形成有两个光电二极管pd,并且以在将像素区域均等地划分成的两个部分中对称地布置的方式形成两个光电二极管pd。需要注意,在下面的描述中,在形成于一个像素中的两个光电二极管pd之中,有时将图中布置在右侧的光电二极管pd称为右光电二极管pd,并且将布置在左侧的光电二极管pd称为左光电二极管pd。
85.在半导体基板12的正面侧(图2中的下侧)上,形成有多层布线层35、多个布线层33和层间电介质34,多层布线层35包括用于对在各个像素2的光电二极管pd中生成和累积的电荷进行读取的像素晶体管(未图示)等。
86.另一方面,在半导体基板12的背面侧(图2中的上侧)上的像素边界部上,形成有像素间遮光膜36。像素间遮光膜36可以是能遮挡光的任何材料,并且期望是具有高遮光性并且可以通过诸如蚀刻等的精细处理而被高精度地处理的材料。例如,像素间遮光膜36可以由钨(w)、铝(al)、铜(cu)、钛(ti)、钼(mo)或镍(ni)等的金属膜形成。
87.此外,例如,可以进一步在半导体基板12的背面侧的界面上形成例如由氧化硅膜
等形成的防反射膜(绝缘层)。
88.在包括像素间遮光膜36的半导体基板12的背面上,形成有滤色器37。例如,滤色器37是通过旋涂包含诸如颜料或染料等的着色物质的感光性树脂而被形成的。稍后将参照图3描述滤色器37的颜色阵列。红色(r)、绿色(g)和蓝色(b)以2
×
2(两行两列)形式的4个像素为单位被布置成拜耳阵列。
89.在滤色器37上,针对各个像素形成有片上透镜38。片上透镜38例如由诸如苯乙烯树脂、丙烯酸树脂、苯乙烯-丙烯酸共聚物树脂或硅氧烷树脂等的树脂材料形成。
90.如上所述,固态摄像元件1是如下的背照式cmos固态摄像元件:其中,滤色器37和片上透镜38被形成在半导体基板12的与形成有多层布线层35的正面侧相反的背面侧上,以便光从背面侧进入。
91.固态摄像元件1的各个像素2在像素中具有两个分开的光电二极管pd。两个光电二极管pd被形成在不同的位置处,以便在两个光电二极管pd分别生成的图像之间发生偏移。根据该图像偏移,计算相移量以计算散焦量。通过调节(移动)摄像镜头,可以实现自动对焦。
92.《3.滤色器的布置示例》
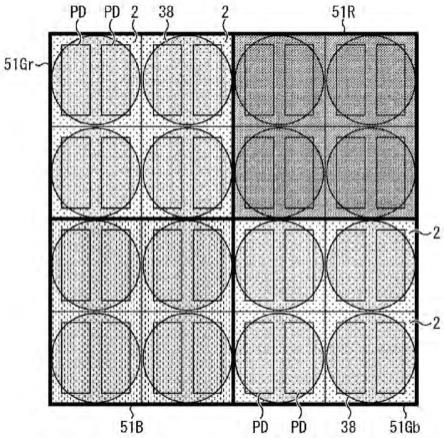
93.接下来,将参照图3描述像素阵列3中的滤色器37的颜色阵列。
94.在具有以矩阵形式二维排列的像素2的像素阵列3中,以2
×
2(2个垂直像素
×
2个水平像素)形式的4个像素2构成一个像素集51。在各个单独的像素集51中,滤色器37被布置为相同颜色。更具体地,r、g和b滤色器37以像素集51为单位被布置成拜耳阵列。
95.在图3中,具有r滤色器37的像素集51由像素集51r表示,并且与像素集51r相邻的具有g滤色器37的像素集51由像素集51gr表示。此外,具有b滤色器37的像素集51由像素集51b表示,并且与像素集51b相邻的具有g滤色器37的像素集51由像素集51gb表示。需要注意,滤色器的构造不限于rgb原色滤波器,并且可以应用包括诸如青色、品红色、黄色和绿色(cmyg)等的互补色滤波器的各种构造。
96.此外,在像素集51中,形成在各个像素2中的两个光电二极管pd的纵向形状的布置方向是同一方向,而且在所有的像素集51中,光电二极管pd的纵向形状都在同一方向上形成。
97.片上透镜38是针对各个像素形成的。
98.《4.像素集的电路构造示例》
99.接下来,图4是图示了像素集51的电路构造的图。
100.图4图示了作为像素集51的示例的像素集51gr的电路构造。
101.像素集51gr的各个像素2包括两个光电二极管pd和用于传输在光电二极管pd中累积的电荷的两个传输晶体管tg。针对像素集51gr设置有一个fd 52、一个复位晶体管53、一个放大晶体管54和一个选择晶体管55。复位晶体管53、放大晶体管54和选择晶体管55中的各者由像素集51gr的4个像素共用。共用复位晶体管53、放大晶体管54和选择晶体管55的4个像素形成共用单元。
102.需要注意,以下,在将像素集51gr中的各个像素2的两个光电二极管pd和两个传输晶体管tg彼此区分开的情况下,在构成像素集51gr的以2
×
2形式的4个像素之中,将左上方的像素2的两个光电二极管pd称为光电二极管pd_gr1l和pd_gr1r,并且将用于传输在光电
二极管pd_gr1l和pd_gr1r中累积的电荷的两个传输晶体管tg称为传输晶体管tg_gr1l和tg_gr1r。
103.此外,将右上方的像素2的两个光电二极管pd称为光电二极管pd_gr2l和pd_gr2r,并且将用于传输在光电二极管pd_gr2l和pd_gr2r中累积的电荷的两个传输晶体管tg称为传输晶体管tg_gr2l和tg_gr2r。
104.同样地,将左下方的像素2的两个光电二极管pd称为光电二极管pd_gr3l和pd_gr3r,并且将用于传输在光电二极管pd_gr3l和pd_gr3r中累积的电荷的两个传输晶体管tg称为传输晶体管tg_gr3l和tg_gr3r。将右下方的像素2的两个光电二极管pd称为光电二极管pd_gr4l和pd_gr4r,并且将用于传输在光电二极管pd_gr4l和pd_gr4r中累积的电荷的两个传输晶体管tg称为传输晶体管tg_gr4l和tg_gr4r。
105.像素集51gr中的各个像素2的各个光电二极管pd接收光,而且生成并累积光电荷。
106.当提供给栅电极的驱动信号trggr1l变为有效时,传输晶体管tg_gr1l响应于此而变为导通,从而将在光电二极管pd_gr1l中累积的光电荷传输至fd 52。当提供给栅电极的驱动信号trggr1r变为有效时,传输晶体管tg_gr1r响应于此而变为导通,从而将在光电二极管pd_gr1r中累积的光电荷传输至fd 52。
107.当提供给栅电极的驱动信号trggr2l变为有效时,传输晶体管tg_gr2l响应于此而变为导通,从而将在光电二极管pd_gr2l中累积的光电荷传输至fd 52。当提供给栅电极的驱动信号trggr2r变为有效时,传输晶体管tg_gr2r响应于此而变为导通,从而将在光电二极管pd_gr2r中累积的光电荷传输至fd 52。这同样适用于光电二极管pd_gr3l、pd_gr3r、pd_gr4l和pd_gr4r以及传输晶体管tg_gr3l、tg_gr3r、tg_gr4l和tg_gr4r。
108.fd 52暂时保持从像素集51gr中的各个像素2的各个光电二极管pd提供的光电荷。
109.当提供给栅电极的驱动信号rst变为有效时,复位晶体管53响应于此而变为导通,从而将fd 52的电位复位至预定电平(复位电压vdd)。
110.放大晶体管54具有经由选择晶体管55连接到垂直信号线9的源电极,由此与恒流源电路56的负载mos一起形成源极跟随器电路,恒流源电路56连接到垂直信号线9的一端。
111.选择晶体管55被连接在放大晶体管54的源电极和垂直信号线9之间。当提供给栅电极的选择信号sel变为有效时,选择晶体管55响应于此而变为导通,从而使共用单元进入选择状态并且将从放大晶体管54输出的共用单元中的像素2的像素信号输出到垂直信号线9。需要注意,针对像素集51(图4中的像素集51gr),可以如图4所示设置一个选择晶体管55,或者可以设置至少两个选择晶体管55。在针对像素集51设置至少两个选择晶体管55的情况下,该至少两个选择晶体管55被连接到不同的垂直信号线9,以便可以以更高的速度读取像素信号。
112.像素2的传输晶体管tg、复位晶体管53、放大晶体管54和选择晶体管55由垂直驱动电路4控制。
113.图5图示了用于将驱动信号trggr提供给构成如图4所示的像素集51的8个传输晶体管tg的栅电极的信号线的构造。
114.为了将驱动信号trggr提供给构成像素集51gr的8个传输晶体管tg的栅电极,如图5所示,在水平方向上排列的多个像素集51需要8条信号线61-1至61-8。8条信号线61-1至61-8是图1中的像素驱动线10的一部分。
115.信号线61-1传输要提供给像素集51gr中的传输晶体管tg_gr1l的栅电极的驱动信号trggr1l。此外,信号线61-1还将驱动信号trggr1l传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r1l(未图示)的栅电极,传输晶体管tg_r1l在像素集51r中的位置与传输晶体管tg_gr1l在像素集51gr中的位置相同。
116.信号线61-2传输要提供给像素集51gr中的传输晶体管tg_gr1r的栅电极的驱动信号trggr1r。此外,信号线61-2还将驱动信号trggr1r传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r1r(未图示)的栅电极,传输晶体管tg_r1r在像素集51r中的位置与传输晶体管tg_gr1r在像素集51gr中的位置相同。
117.信号线61-3传输要提供给像素集51gr中的传输晶体管tg_gr2l的栅电极的驱动信号trggr2l。此外,信号线61-3还将驱动信号trggr2l传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r2l(未图示)的栅电极,传输晶体管tg_r2l在像素集51r中的位置与传输晶体管tg_gr2l在像素集51gr中的位置相同。
118.信号线61-4传输要提供给像素集51gr中的传输晶体管tg_gr2r的栅电极的驱动信号trggr2r。此外,信号线61-4还将驱动信号trggr2r传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r2r(未图示)的栅电极,传输晶体管tg_r2r在像素集51r中的位置与传输晶体管tg_gr2r在像素集51gr中的位置相同。
119.信号线61-5传输要提供给像素集51gr中的传输晶体管tg_gr3l的栅电极的驱动信号trggr3l。此外,信号线61-5还将驱动信号trggr3l传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r3l(未图示)的栅电极,传输晶体管tg_r3l在像素集51r中的位置与传输晶体管tg_gr3l在像素集51gr中的位置相同。
120.信号线61-6传输要提供给像素集51gr中的传输晶体管tg_gr3r的栅电极的驱动信号trggr3r。此外,信号线61-6还将驱动信号trggr3r传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r3r(未图示)的栅电极,传输晶体管tg_r3r在像素集51r中的位置与传输晶体管tg_gr3r在像素集51gr中的位置相同。
121.信号线61-7传输要提供给像素集51gr中的传输晶体管tg_gr4l的栅电极的驱动信号trggr4l。此外,信号线61-7还将驱动信号trggr4l传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r4l(未图示)的栅电极,传输晶体管tg_r4l在像素集51r中的位置与传输晶体管tg_gr4l在像素集51gr中的位置相同。
122.信号线61-8传输要提供给像素集51gr中的传输晶体管tg_gr4r的栅电极的驱动信号trggr4r。此外,信号线61-8还将驱动信号trggr4r传输到与像素集51gr相邻的像素集51r中的传输晶体管tg_r4r(未图示)的栅电极,传输晶体管tg_r4r在像素集51r中的位置与传输晶体管tg_gr4r在像素集51gr中的位置相同。
123.同样地,在水平方向上排列的像素集51b和51gb需要8条信号线62-1至62-8。
124.信号线62-1将驱动信号trggb1l传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr1l对应的传输晶体管tg的栅电极。
125.信号线62-2将驱动信号trggb1r传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr1r对应的传输晶体管tg的栅电极。
126.信号线62-3将驱动信号trggb2l传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr2l对应的传输晶体管tg的栅电极。
127.信号线62-4将驱动信号trggb2r传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr2r对应的传输晶体管tg的栅电极。
128.信号线62-5将驱动信号trggb3l传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr3l对应的传输晶体管tg的栅电极。
129.信号线62-6将驱动信号trggb3r传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr3r对应的传输晶体管tg的栅电极。
130.信号线62-7将驱动信号trggb4l传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr4l对应的传输晶体管tg的栅电极。
131.信号线62-8将驱动信号trggb4r传输到像素集51b和51gb中的与像素集51gr中的传输晶体管tg_gr4r对应的传输晶体管tg的栅电极。
132.通过如上地形成共用单元中的多个像素2的电路,响应于来自垂直驱动电路4的驱动信号,共用单元中的像素2可以以各个光电二极管pd为单位输出像素信号,并且可以以各个像素为单位或以多个像素为单位输出像素信号。在以各个像素为单位或以多个像素为单位输出像素信号的情况下,同时输出的多个传输晶体管tg被同时激活。fd 52将经由同时被激活的传输晶体管tg从多个光电二极管pd提供的电荷相加。因此,以各个像素为单位或以多个像素为单位的像素信号通过放大晶体管54和选择晶体管55从fd 52被输出到列信号处理电路5。
133.需要注意,尽管图4和图5图示了构成像素集51的以2
×
2形式的4个像素是共用单元的电路示例,但是作为共用单元的多个像素的组合不限于此。例如,以1
×
2(1个垂直像素
×
2个水平像素)形式或2
×
1(2个垂直像素
×
1个水平像素)形式的2个像素可以是共用单元,或者以4
×
1(4个垂直像素
×
1个水平像素)形式的4个像素可以是共用单元。
134.《5.输出模式的说明》
135.《5.1全分辨率模式》
136.接下来,将描述可以由固态摄像元件1执行的多个输出模式。
137.首先,将描述如下的全分辨率模式:其中,分别输出在像素阵列3的所有光电二极管pd中生成的像素信号。
138.图6是图示了在固态摄像元件1以全分辨率模式操作的情况下的像素集51gr的驱动(像素信号输出控制)的图。
139.图6中画阴影线的光电二极管pd表示被选择以输出像素信号的光电二极管pd。在全分辨率模式下,如图6所示,顺序地选择像素集51gr中的8个光电二极管pd,并且分别输出由8个光电二极管pd分别生成的像素信号。
140.在图6的示例中,8个光电二极管pd的选择顺序是光电二极管pd_gr1l、pd_gr1r、pd_gr2l、pd_gr2r、pd_gr3l、pd_gr3r、pd_gr4l和pd_gr4r的顺序。该顺序不限于此。
141.在全分辨率模式下,通过组合同一像素中的两个光电二极管pd的像素信号,可以获得1个像素的像素信号,并且通过比较同一像素中的两个光电二极管pd的像素信号,可以检测相位差。其他像素集51gb、51r和51b进行与图6中的像素集51gr类似的操作。
142.因此,在全分辨率模式下,所有像素2可以输出以各个像素为单位的信号,并且可以输出用于检测相位差的信号。
143.此外,在固态摄像元件1中,虽然如图3所示,r、g或b的滤色器37以4个像素为单位
(以像素集51为单位)布置,但是全分辨率模式还允许重新拼接(re-mosaicing)处理,以便以像素为单位重新生成和输出r、g、b的拜耳阵列中的像素信号。
144.需要注意,在进行图6中的驱动的全分辨率模式下,帧频降低并且功耗增加。因此,可以进行对像素集51gr中的一些像素2不进行相位差检测的驱动。
145.例如,如图7所示,对于构成像素集51gr的4个像素之中的右上方的像素2和左下方的像素2,固态摄像元件1驱动该像素中的两个光电二极管pd以同时读取该像素。同样在图7中,画阴影线的光电二极管pd表示被选择以输出像素信号的光电二极管pd。
146.使用左上方的像素2的光电二极管pd_gr1l和pd_gr1r以及右下方的像素2的光电二极管pd_gr4l和pd_gr4r的像素信号来检测相位差。因此,通过减少用于检测相位差的像素2的数量,可以提高帧频并改善功耗。可替代地,可以根据接收的光量的差异来改变可以检测相位差的像素2。例如,在低照度下,进行图6中的在所有像素中进行相位差检测的驱动,而在高照度下,进行图7中的不包括一些像素2的驱动。
147.虽然图7的示例是在构成像素集51gr的4个像素之中的2个像素中进行相位差检测的示例,但是可以进行仅在一个像素中进行相位差检测的驱动。
148.《5.2四像素相加相位差检测模式》
149.接下来,将描述四像素相加相位差检测模式。
150.固态摄像元件1可以进行如下的四像素相加相位差检测模式:其中,在作为共用单元的各个像素集51中,即以2
×
2形式的4个像素为单位,将像素信号相加并输出,并且在像素阵列3的整个表面上检测相位差。
151.图8是图示了四像素相加相位差检测模式下的驱动的图。
152.同样在图8中,画阴影线的光电二极管pd表示被选择以输出像素信号的光电二极管pd。
153.在四像素相加相位差检测模式下,固态摄像元件1将像素2的一对光电二极管pd之中的在像素集51的像素中位于相同位置处的光电二极管pd的像素信号相加并输出。例如,如图8的a所示,固态摄像元件1首先将像素集51中所有的左光电二极管pd的像素信号相加并输出,然后,如图8的b所示,将像素集51中所有的右光电二极管pd的像素信号相加并输出。需要注意,左光电二极管pd和右光电二极管pd的读取顺序可以颠倒。
154.通过进行这样的驱动,可以根据被读取的各个单独的像素集51中的左光电二极管pd的像素信号和右光电二极管pd的像素信号来检测相位差,并且通过组合两个像素信号,可以获得各个单独的像素集51(以4个像素为单位)的像素信号输出。换句话说,可以在保持因像素电容qs增大而引起的动态范围的优势的同时检测整个表面的相位差。
155.作为可辨别地读取左光电二极管pd的像素信号和右光电二极管pd的像素信号的方法,可以采用两种方法:分别地读取左光电二极管pd的像素信号和右光电二极管pd的像素信号的第一读取方法;和读取通过将左光电二极管pd的像素信号和右光电二极管pd的像素信号相加而获得的信号的第二读取方法。
156.将简要描述第一读取方法和第二读取方法。
157.首先,将描述第一读取方法。
158.首先,在左光电二极管pd和右光电二极管pd接收光(曝光)的同时,获得用于进行相关双采样的暗电平信号。
159.在经过预定的曝光时间之后,固态摄像元件1首先读取像素集51的左光电二极管pd组和右光电二极管pd组中的一者的像素信号,例如,左光电二极管pd组的像素信号。
160.例如,将以图4所示的像素集51gr为例来描述左光电二极管pd组的像素信号的读取。在将选择晶体管55激活之后,将传输晶体管tg_gr1l、tg_gr2l、tg_gr3l和tg_gr4l激活以将在光电二极管pd_gr1l、pd_gr2l、pd_gr3l和pd_gr4l中累积的电荷传输到fd 52,以便与fd 52中的累积电荷对应的电压信号通过垂直信号线9被输出到列信号处理电路5。
161.输出到列信号处理电路5的电压信号是左光电二极管pd组的像素信号和暗电平信号之和。因此,通过从列信号处理电路5的电压信号中减去暗电平信号来获得左光电二极管pd组的像素信号。
162.接下来,固态摄像元件1将复位晶体管53导通以使fd 52中的累积电荷复位,然后,读取像素集51的左光电二极管pd组和右光电二极管pd组中的另一者的像素信号,例如,右光电二极管pd组的像素信号。在图4所示的像素集51gr的示例中,在将选择晶体管55激活之后,将传输晶体管tg_gr1r、tg_gr2r、tg_gr3r和tg_gr4r激活以将在光电二极管pd_gr1r、pd_gr2r、pd_gr3r和pd_gr4中累积的电荷传输到fd 52,以便与fd 52中的累积电荷对应的电压信号通过垂直信号线9被输出到列信号处理电路5。
163.输出到列信号处理电路5的电压信号是右光电二极管pd组的像素信号和暗电平信号之和。因此,通过从列信号处理电路5的电压信号中减去暗电平信号来获得右光电二极管pd组的像素信号。
164.在第一读取方法中,分别地读取左光电二极管pd的像素信号和右光电二极管pd的像素信号,以便可以直接获得相位差信号。这允许获得用于测距的高质量信号。另一方面,可以通过将左光电二极管pd和右光电二极管pd的信号数字地相加来获得拍摄图像用的信号。
165.接下来,将描述第二读取方法。
166.第二读取方法与第一读取方法相同,直到获得暗电平信号并获得像素集51的左光电二极管pd组和右光电二极管pd组中的一者的像素信号(左光电二极管pd组的像素信号)为止。
167.在获得左光电二极管pd组和右光电二极管pd组中的一者的像素信号之后,与第一读取方法不同,固态摄像元件1不将复位晶体管53导通(使其保持截止),并且读取像素集51的左光电二极管pd组和右光电二极管pd组中的另一者的像素信号,例如,右光电二极管pd组的像素信号。
168.输出到列信号处理电路5的电压信号是左光电二极管pd组和右光电二极管pd组的信号和暗电平信号之和。列信号处理电路5首先通过从电压信号中减去暗电平信号来获得左光电二极管pd组和右光电二极管pd组的像素信号,然后通过从左光电二极管pd组和右光电二极管pd组的像素信号中减去较早获得的左光电二极管pd组的像素信号来获得右光电二极管pd组的像素信号。
169.在第二读取方法中,可以如上地获得左光电二极管pd的像素信号和右光电二极管pd的像素信号,并且可以间接获得相位差信号。另一方面,由于在拍摄图像用的信号是模拟信号时会将信号相加,因此该信号具有良好的信号质量,并且与第一读取方法相比,在读取时间和功耗方面也具有优势。
170.《5.3四像素相加模式》
171.接下来,将描述四像素相加模式。
172.在不需要相位差信息的情况下,固态摄像元件1可以执行如下的四像素相加模式:其中,在作为共用单元的各个像素集51中,即以2
×
2形式的4个像素为单位,将像素信号相加并输出。
173.在四像素相加模式下,作为共用单元的像素集51中的所有(8个)传输晶体管tg同时导通,并且像素集51中的所有光电二极管pd中的电荷被提供给fd 52。fd 52将像素集51中的所有光电二极管pd的电荷相加。然后,与相加电荷对应的电压信号被输出到列信号处理电路5。通过获得电压信号和暗电平信号之间的差,可以获得各个像素集51的像素信号。
174.《5.4第一相位差hdr模式》
175.接下来,将描述第一相位差hdr模式。
176.第一相位差hdr模式是能够检测相位差并生成高动态范围图像(在下文中被称为hdr图像)的输出模式。
177.为了检测相位差,需要构成像素阵列3的多个像素2中的至少一些像素2是分别输出左光电二极管pd的像素信号和右光电二极管pd的像素信号的像素2。
178.此外,为了生成hdr图像,需要构成像素阵列3的多个像素2包括曝光时间不同的像素2。
179.因此,在第一相位差hdr模式下,如图9所示,固态摄像元件1针对构成像素阵列3的多个像素2设定两种类型的曝光时间。
180.图9是图示了在第一相位差hdr模式下针对作为像素阵列3的一部分的拜耳阵列中的4个(2
×
2)像素集51设定的曝光时间的图。
181.在第一相位差hdr模式下,针对各个像素设定第一曝光时间和第二曝光时间中的一者。第二曝光时间是比第一曝光时间短的曝光时间(第一曝光时间》第二曝光时间)。在图9中,设定有第一曝光时间的光电二极管pd中写着“l”,并且设定有第二曝光时间的光电二极管pd中写着“s”。
182.如图9所示,针对构成一个像素集51的4个像素2,沿对角线方向成对地设定第一曝光时间和第二曝光时间。例如,如图9的示例,针对构成像素集51的4个像素之中的右上方和左下方的两个像素设定第一曝光时间(l),并且针对右下方和左上方的两个像素设定第二曝光时间(s)。需要注意,设定有第一曝光时间(l)和第二曝光时间(s)的像素2的布置可以颠倒。
183.图10是图示了在第一相位差hdr模式下读取像素信号的过程的图。同样在图10中,画阴影线的光电二极管pd表示被选择以输出像素信号的光电二极管pd。
184.在第一相位差hdr模式下,如图10所示,固态摄像元件1针对设定有第一曝光时间(l)的两个像素输出所有光电二极管pd的像素信号,并且针对设定有第二曝光时间(s)的两个像素,分别地输出左光电二极管pd的像素信号和右光电二极管pd的像素信号。
185.具体地,固态摄像元件1按照右上方和左下方的两个像素2的所有光电二极管pd的像素信号、左上方和右下方的像素2的左光电二极管pd的像素信号以及左上方和右下方的像素2的右光电二极管pd的像素信号的顺序同时输出多个光电二极管pd的像素信号。
186.因此,曝光时间被设定为第二曝光时间(s)的两个像素2分别地输出左光电二极管
pd的像素信号和右光电二极管pd的像素信号,以便可以检测相位差。此外,由于包括设定有第一曝光时间(l)的像素2和设定有第二曝光时间(s)的像素2,因此可以生成hdr图像。
187.需要注意,用于检测相位差的像素2可以是曝光时间被设定为第一曝光时间(l)的像素2。然而,如果光强度高,则像素2可能饱和。因此,优选地,用于检测相位差的像素2是设定有第二曝光时间(s)的像素2。通过将设定有第二曝光时间(s)的像素2用作相位差检测像素,可以在不引起饱和的情况下获得相位差信息。
188.如上所述,在第一相位差hdr模式下,针对各个像素集51,设定两种类型的曝光时间,即第一曝光时间(l)和第二曝光时间(s),并且在像素集51的一些像素2中,具体地,在设定有第二曝光时间(s)的像素2中,分别地输出左光电二极管pd的像素信号和右光电二极管pd的像素信号以检测相位差,以便可以同时获得用于相位差检测的信号和具有高动态范围的hdr图像的信号。
189.《5.5第二相位差hdr模式》
190.接下来,将描述第二相位差hdr模式。
191.与第一相位差hdr模式相同,第二相位差hdr模式是能够进行相位差检测和hdr图像生成的输出模式。第二相位差hdr模式与第一相位差hdr模式的不同之处在于,针对像素阵列3中的像素2设定的曝光时间不是第一相位差hdr模式中的两种类型,而是三种类型。
192.图11是图示了在第二相位差hdr模式下针对作为像素阵列3的一部分的拜耳阵列中的4个(2
×
2)像素集51设定的曝光时间的图。
193.在第二相位差hdr模式下,针对各个像素设定第一至第三曝光时间中的一者。第二曝光时间是比第一曝光时间短的曝光时间,并且第三曝光时间是比第二曝光时间还要短的曝光时间(第一曝光时间>第二曝光时间>第三曝光时间)。在图11中,设定有第一曝光时间的光电二极管pd中写着“l”,设定有第二曝光时间的光电二极管pd中写着“m”,并且设定有第三曝光时间的光电二极管pd中写着“s”。在第一曝光时间(l)、第二曝光时间(m)和第三曝光时间(s)之中,中间的第二曝光时间(m)是适合于自动曝光时的适当曝光的曝光时间。
194.如图11所示,在构成一个像素集51的4个像素2之中,针对在预定的对角线方向上的两个像素设定第二曝光时间(m),针对在另一对角线方向上的两个像素2中的一者设定第一曝光时间(l),并且针对另一者设定第三曝光时间(s)。需要注意,设定有第二曝光时间(m)的对角线方向可以是右斜方向(diagonally right direction),而不是图11中的左斜方向。此外,设定有第一曝光时间(l)和第三曝光时间(s)的像素2的布置可以颠倒。
195.图12是图示了在第二相位差hdr模式下读取像素信号的过程的图。同样在图12中,画阴影线的光电二极管pd表示被选择以输出像素信号的光电二极管pd。
196.在第二相位差hdr模式下,如图12所示,固态摄像元件1针对设定有第二曝光时间(m)的两个像素分别地输出左光电二极管pd的像素信号和右光电二极管pd的像素信号,并且针对设定有第一曝光时间(l)和第三曝光时间(s)的两个像素以各个像素为单位输出光电二极管pd的像素信号。
197.具体地,固态摄像元件1按照右上方的像素2的两个光电二极管pd的像素信号、左上方和右下方的像素2的左光电二极管pd的像素信号、左上方和右下方的像素2的右光电二极管pd的像素信号、以及左下方的像素2的两个光电二极管pd的像素信号的顺序同时输出多个光电二极管pd的像素信号。
198.因此,曝光时间被设定为第二曝光时间(m)的两个像素2分别地输出左光电二极管pd的像素信号和右光电二极管pd的像素信号,以便可以检测相位差。此外,由于包括设定有不同曝光时间的像素2,因此可以生成hdr图像。
199.需要注意,用于检测相位差的像素2可以是曝光时间被设定为第一曝光时间(l)或第三曝光时间(s)的像素2。然而,如果光强度高,则像素2可能饱和,并且如果光强度低,则信号电平可能过低。因此,优选地,使用设定有用于适当曝光的第二曝光时间(m)的像素2。通过将设定有第二曝光时间(m)的像素2用作相位差检测像素,可以在不引起饱和的情况下获得相位差信息。
200.如上所述,在第二相位差hdr模式下,针对各个像素集51,设定三种类型的曝光时间,即第一曝光时间(l)、第二曝光时间(m)和第三曝光时间(s),并且在各个像素集51的一些像素2中,具体地,在设定有第二曝光时间(m)的像素2中,分别地输出左光电二极管pd和右光电二极管pd的像素信号以检测相位差,以便可以同时获得用于相位差检测的信号和具有高动态范围的hdr图像的信号。
201.需要注意,为了能够在第一相位差hdr模式和第二相位差hdr模式两者下进行操作,在水平方向上布置的像素集51需要如图5所示的8条信号线61-1至61-8或62-1至62-8。然而,在仅需要能够在第一相位差hdr模式和第二相位差hdr模式中的仅一者下进行操作的情况下,可以减少用于在水平方向上布置的各个像素集51的信号线的数量。
202.例如,图13图示了在将仅第一相位差hdr模式下的操作实现为能够进行相位差检测和hdr图像生成的输出模式的情况下的信号线的布线示例。
203.在图13中,通过针对在水平方向上布置的像素集51布置4条信号线81-1至81-4,第一相位差hdr模式下的操作成为可能。
204.具体地,布置单条信号线81-1以控制设定有第二曝光时间(s)的曝光时间的在对角线方向上成对的像素2的左光电二极管pd的像素信号,并且布置单条信号线81-2以控制右光电二极管pd的像素信号。此外,布置单条信号线81-3以控制设定有第一曝光时间(l)的曝光时间的在对角线方向上成对的像素2的左光电二极管pd的像素信号,并且布置单条信号线81-4以控制右光电二极管pd的像素信号。
205.图14图示了在将仅第二相位差hdr模式下的操作实现为能够进行相位差检测和hdr图像生成的输出模式的情况下的信号线的布线示例。
206.在图14中,通过针对在水平方向上布置的像素集51布置6条信号线82-1至82-6,第二相位差hdr模式下的操作成为可能。
207.具体地,布置单条信号线82-1以控制设定有第一曝光时间(l)的曝光时间的像素2的左光电二极管pd的像素信号,并且布置单条信号线82-2以控制右光电二极管pd的像素信号。此外,布置单条信号线82-3以控制设定有第二曝光时间(m)的曝光时间的在对角线方向上成对的像素2的左光电二极管pd的像素信号,并且布置单条信号线82-4以控制右光电二极管pd的像素信号。布置单条信号线82-5以控制设定有第三曝光时间(s)的曝光时间的像素2的左光电二极管pd的像素信号,并且布置单条信号线82-6以控制右光电二极管pd的像素信号。
208.如上所述,固态摄像元件1可以执行作为输出模式的分别输出各个像素2的光电二极管pd的像素信号的全分辨率模式、以4个像素为单位将左光电二极管pd或右光电二极管
pd的像素信号相加并输出的四像素相加相位差检测模式、将像素集51中的所有光电二极管pd的像素信号相加并输出的四像素相加模式、以及能够进行相位差检测和hdr图像生成的第一相位差hdr模式和第二相位差hdr模式。
209.全分辨率模式能够通过重新拼接来实现所有像素中的相位差检测和高分辨率输出,而且四像素相加相位差检测模式能够实现整个表面的相位差检测并且能够通过四像素相加来实现高s/n和高动态范围信号输出。此外,四像素相加模式能够通过四像素相加来实现高s/n和高动态范围信号输出,并且第一相位差hdr模式和第二相位差hdr模式能够实现hdr图像生成和整个表面的相位差检测。需要注意,为了实现hdr,如上所述,可以针对具有单个灵敏度的像素设定至少两个曝光时间,或者可以针对形成为像素集的具有不同灵敏度的多个像素设定单个曝光时间。具有不同灵敏度的多个像素的示例包括:作为具有高灵敏度的像素的包括光接收面积大的光电二极管的像素;以及作为具有低灵敏度的像素的包括光接收面积小的光电二极管的像素。
210.需要注意,当然,固态摄像元件1也许还能够执行上述输出模式以外的输出模式。
211.《6.滤色器的颜色阵列的变形例》
212.图15图示了滤色器的颜色阵列的变形例。
213.在上述示例中,如图3及其他图所示,r、g和b滤色器37以像素集51为单位被布置成拜耳阵列。
214.相比之下,在图15中,r、g和b滤色器37以像素2为单位被布置成拜耳阵列。
215.因此,滤色器37可以以像素为单位被布置成拜耳阵列。
216.共用复位晶体管53、放大晶体管54和选择晶体管55的像素电路的共用单元可以是如图4一样的以2
×
2(2个垂直像素
×
2个水平像素)形式的4个像素,或者可以是以4
×
1(4个垂直像素
×
1个水平像素)形式的4个像素。如果将以4
×
1形式的4个像素设定为共用单元,则如图15所示的以像素为单位的拜耳阵列中的滤色器37的颜色阵列允许将相同颜色的像素的像素信号相加。
217.《7.光电二极管的布置方向的变形例》
218.图16图示了光电二极管pd的布置方向的变形例。
219.在上述示例中,如图3所示,在各个像素集51中,像素2中的一对光电二极管pd被形成为其纵向形状的布置方向是同一方向,并且在所有像素集51中,该布置方向也是同一方向。
220.然而,像素中的一对光电二极管pd的纵向形状的布置方向在像素之间或在像素集之间可以不同。
221.图16的a图示了如下的示例:其中,在各个像素集51中,像素2中的一对光电二极管pd被形成为其纵向形状的布置方向是同一方向,但是在像素集51之间该布置方向是不同的。
222.在图16的a中,包括g滤色器37的像素集51gr和像素集51gb中成对的光电二极管pd的纵向形状的布置方向是左右方向(水平方向),并且包括r滤色器37的像素集51r和包括b滤色器37的像素集51b中成对的光电二极管pd的纵向形状的布置方向是上下方向(垂直方向)。换句话说,光电二极管pd被形成为像素中的一对光电二极管pd的纵向形状的布置方向在像素集51gr和像素集51gb与像素集51r和像素集51b之间成直角。包括相同颜色的滤色器
37的像素集51中的光电二极管pd的纵向形状的布置方向是相同的。
223.图16的b图示了如下的示例:其中,在包括相同颜色的滤色器37的各个像素集51中,在水平方向上布置的两个像素中成对的光电二极管pd被形成为其纵向形状的布置方向相同,并且在垂直方向上布置的两个像素中成对的光电二极管pd被形成为其纵向形状的布置方向是正交方向。
224.在图16的b中,在各个像素集51中,光电二极管pd被形成为上部的两个像素中成对的光电二极管pd的纵向形状的布置方向是左右方向(水平方向),并且下部的两个像素中成对的光电二极管pd的纵向形状的布置方向是上下方向(垂直方向)。
225.图16的c图示了如下的示例:其中,在包括相同颜色的滤色器37的各个像素集51中,在水平方向上布置的两个像素中成对的光电二极管pd被形成为其纵向形状的布置方向是正交方向,并且在垂直方向上布置的两个像素中成对的光电二极管pd被形成为其纵向形状的布置方向也是正交方向。
226.在图16的c中,在各个像素集51中,光电二极管pd被形成为上部的两个像素中成对的光电二极管pd的纵向形状的布置方向是左右方向(水平方向)和上下方向(垂直方向),并且下部的两个像素中成对的光电二极管pd的纵向形状的布置方向也是左右方向(水平方向)和上下方向(垂直方向)。
227.如上,形成在各个像素中的纵向形状的两个光电二极管pd在垂直方向或水平方向上对称地布置,并且对于它们在像素集51的像素中的布置方向,可以使用同一方向或正交方向。
228.《8.片上透镜布置的变形例》
229.图17图示了片上透镜38的布置的变形例。
230.在上述示例中,如图3所示,片上透镜38针对各个像素被形成。
231.然而,如图17所示,对于构成像素阵列3的多个像素集51中的一些像素集,可以针对一个像素集51布置一个片上透镜91。
232.图17的a图示了如下的示例:其中,针对包括g滤色器37的像素集51gb布置一个片上透镜91,并且针对其他像素集51gr、51r和51b,布置各个像素的片上透镜38。
233.图17的b图示了如下的示例:其中,针对包括r滤色器37的像素集51r布置一个片上透镜91,并且针对其他像素集51gr、51gb和51b,布置各个像素的片上透镜38。
234.图17的c图示了如下的示例:其中,针对包括b滤色器37的像素集51b布置一个片上透镜91,并且针对其他像素集51gr、51r和51gb,布置各个像素的片上透镜38。
235.在二维地布置有像素集51的像素阵列3中,图17的a至c中的片上透镜91可以以规则的间隔布置或随机地布置。
236.虽然具有片上透镜91的像素集51不能获得用于生成hdr图像的像素信号,但是可以利用各个像素中的像素信号来检测相位差,因此对于低照度下的相位差检测是有效的。
237.《9.像素的第二截面构造示例》
238.图18是图示了图1中的固态摄像元件1的像素阵列3的第二截面构造示例的图。
239.在图18中,用相同的附图标记表示与图2所示的第一截面构造示例中的部分对应的部分,并且将适当地省略这些部分的描述。
240.图18的第二截面构造示例与图2所示的第一截面构造示例的不同之处在于,在半
导体基板12中形成绝缘层101。
241.具体地,在图2所示的第一截面构造示例中,仅p型半导体区域31和n型半导体区域32被形成在半导体基板12中。在图18的第二截面构造示例中,绝缘层101也被形成在相邻像素之间的像素边界处以及各个像素中的两个光电二极管pd之间。绝缘层101例如通过深沟槽隔离(dti:deep trench isolation)形成,在该深沟槽隔离中,在从半导体基板12的背面侧挖出的深槽(沟槽)的内周表面上形成氧化膜(例如,teos膜),并且用多晶硅填充沟槽内部。需要注意,绝缘层101不限于使用氧化膜和多晶硅的构造,并且可以是使用诸如铪等的金属的构造或使用杂质层的构造。此外,可以将不同构造的绝缘层101应用于不同的像素中。例如,在透射相对长的波长的r像素中,可以将杂质层应用为绝缘层101,并且在b像素和g像素中,可以将氧化膜、多晶硅或金属应用为绝缘层101。此外,绝缘层101可以是比dti浅的浅沟槽隔离(sti:shallow trench isolation),或者可以是将像素彼此完全分离的全沟槽隔离(fti:full trench isolation)。
242.图19是图示了在以4
×
4形式的16个像素的范围内形成有绝缘层101的区域的平面图。
243.从图19的平面图可以看出,绝缘层101被形成在像素2的边界处以及各个像素中的两个光电二极管pd之间,并且两个光电二极管pd通过绝缘层101而彼此分离。
244.《10.像素的第三截面构造示例》
245.图20是图示了图1中的固态摄像元件1的像素阵列3的第三截面构造示例的图。
246.在图20中,用相同的附图标记表示与图18所示的第二截面构造示例中的部分对应的部分,并且将适当地省略这些部分的描述。
247.在图18的第二截面构造示例中,绝缘层101被形成在像素2的边界处以及各个像素中的两个光电二极管pd之间。
248.在图20的第三截面构造示例中,虽然如第二截面构造示例一样,在像素2的边界处形成有绝缘层101,但是在各个像素中的两个光电二极管pd之间,形成有与n型半导体区域32的导电类型相反的导电类型(即p型)的杂质层102。p型杂质层102的杂质浓度高于半导体区域31的杂质浓度。杂质层102可以例如通过从半导体基板12的背面侧进行离子注入而被形成。
249.图21是图示了在以4
×
4形式的16个像素的范围内形成有绝缘层101和杂质层102的区域的平面图。
250.从图21的平面图可以看出,绝缘层101被形成在像素2的边界处,并且杂质层102将各个像素中的两个光电二极管pd彼此分离。
251.如图22的b所示,各个像素中的两个光电二极管pd之间的位垒可以与像素边界处的位垒相同,或者可以使其低于像素边界处的位垒。
252.图22的a是第三截面构造示例中的一个像素的截面结构图,并且图22的b是与图22的a对应的电位图。
253.如图22的b所示,通过使两个光电二极管pd之间的位垒低于像素边界处的位垒,当在一个光电二极管pd中累积的电荷达到饱和水平时,电荷在溢出到fd 52中之前先流入另一光电二极管pd中。因此,可以改善通过组合左光电二极管pd和右光电二极管pd而获得的一个像素的像素信号的线性。
254.通过调节杂质层102中的杂质浓度,可以使光电二极管pd之间的位垒的高度低于像素边界处的位垒。
255.需要注意,如图21所示,杂质层102可以被形成为使夹在两个光电二极管pd之间的区域完全隔离,或者如图23所示,可以被形成为仅使夹在两个光电二极管pd之间的区域的一部分隔离。在图23中,杂质层102仅被形成在夹在两个光电二极管pd之间的区域的像素中心附近的一部分中。
256.图23中形成有杂质层102的部分的截面图与图20相同,并且图23中未形成杂质层102的部分的截面图与图18相同。
257.《11.添加遮光膜的构造示例》
258.在上述示例中,虽然在像素边界部处形成用于防止光进入相邻像素的像素间遮光膜36,但是在光电二极管pd上未形成遮光膜。
259.然而,对于像素阵列3中的一些像素2,可以采用在像素中的两个光电二极管pd上布置遮光膜的构造。
260.图24是图示了在光电二极管pd上布置遮光膜的第一构造的平面图。
261.在图24的a和b中,在像素集51gr的各个像素2中,像素中的两个光电二极管pd的上半部分或下半部分通过遮光膜121遮光。
262.图24的a是像素中的两个光电二极管pd的下半部分通过遮光膜121遮光的示例,并且图24的b是像素中的两个光电二极管pd的上半部分通过遮光膜121遮光的示例。
263.如图3一样,片上透镜38针对各个像素被形成。
264.使用其中多个遮光膜121被对称地布置的图24的a中的像素集51gr的像素信号(4个像素的相加像素信号)和图24的b中的像素集51gr的像素信号(4个像素的相加像素信号),获得相位差信息。
265.图25是图示了在光电二极管pd上布置遮光膜的第二构造的平面图。
266.在图25的a和b中,在像素集51gr的各个像素2中,像素的两个光电二极管pd之中的一者通过遮光膜121遮光。
267.图25的a是像素集51gr中的各个像素2的两个光电二极管pd之中的左光电二极管pd通过遮光膜121遮光的示例,并且图25的b是像素集51gr中的各个像素2的两个光电二极管pd之中的右光电二极管pd通过遮光膜121遮光的示例。
268.如图3一样,片上透镜38针对各个像素被形成。
269.使用其中多个遮光膜121被对称地布置的图25的a中的像素集51gr的像素信号(4个像素的相加像素信号)和图25的b中的像素集51gr的像素信号(4个像素的相加像素信号),获得相位差信息。
270.图24和图25中的第一构造和第二构造都是遮光膜121为像素集51gr中的所有像素2部分地遮光的构造。
271.图26是图示了在光电二极管pd上布置遮光膜的第三构造的平面图。
272.在图26的a和b中,在构成像素集51gb的4个像素之中,上部的两个像素或下部的两个像素的所有光电二极管pd通过遮光膜121遮光。
273.图26的a是像素集51gb中的下部的两个像素的所有光电二极管pd通过遮光膜121遮光的示例,并且图26的b是像素集51gb中的上部的两个像素的所有光电二极管pd通过遮
光膜121遮光的示例。
274.在图26中,如图17一样,在布置有遮光膜121的像素集51gb上形成一个片上透镜91。在未布置遮光膜121的像素集51gr、51r和51b上,形成各个像素的片上透镜38。
275.使用其中多个遮光膜121被对称地布置的图26的a中的像素集51gb的像素信号(4个像素的相加像素信号)和图26的b中的像素集51gb的像素信号(4个像素的相加像素信号),获得相位差信息。
276.图27是图示了在光电二极管pd上布置遮光膜的第四构造的平面图。
277.在图27的a和b中,在构成像素集51gb的4个像素之中,左边的两个像素或右边的两个像素的所有光电二极管pd通过遮光膜121遮光。
278.图27的a是像素集51gb中的左边的两个像素的所有光电二极管pd通过遮光膜121遮光的示例,并且图27的b是像素集51gb中的右边的两个像素的所有光电二极管pd通过遮光膜121遮光的示例。
279.在图27中,如图17一样,在布置有遮光膜121的像素集51gb上形成一个片上透镜91。在未布置遮光膜121的像素集51gr、51r和51b上,形成各个像素的片上透镜38。
280.使用其中多个遮光膜121被对称地布置的图27的a中的像素集51gb的像素信号(4个像素的相加像素信号)和图27的b中的像素集51gb的像素信号(4个像素的相加像素信号),获得相位差信息。
281.图26和图27中的第三构造和第四构造都是遮光膜121为像素集51gb中的一些像素2完全遮光的构造。
282.在入射光的光强度高并且在未布置遮光膜121的像素集51中不能获得相位差信息的情况下,图24至图27的布置有遮光膜121的第一构造至第四构造允许布置有遮光膜121的像素集51获得相位差信息。因此,布置有遮光膜121的第一构造至第四构造在入射光的光强度高的情况下能够有效地获得相位差信息。
283.图24至图27的布置有遮光膜的第一构造至第四构造是遮光膜121被布置在像素集51gb或像素集51gr中的示例。可以针对其他像素集51r或51b形成类似的遮光膜121,或者可以在所有的像素集51gb、51r和51b上形成遮光膜121。
284.《12.其他变形例》
285.图28图示了固态摄像元件1的另一变形例。
286.在上述示例中,像素集51的构成单位是以2
×
2(2个垂直像素
×
2个水平像素)形式的4个像素。然而,像素集51不限于以2
×
2形式的4个像素,并且仅需要包括多个像素2即可。
287.图28图示了像素集51的构成单位是以4
×
4(4个垂直像素
×
4个水平像素)形式的16个像素的示例。虽然图28的示例图示了针对各个像素形成片上透镜38的示例,但不限于此。可以针对以2
×
2形式的4个像素布置一个片上透镜,或者可以针对以4
×
4形式的16个像素布置一个片上透镜。
288.此外,例如,可以将以3
×
3(3个垂直像素
×
3个水平像素)形式的9个像素设定为像素集51的构成单位。
289.图29图示了固态摄像元件1的又一变形例。
290.在上述示例中,在固态摄像元件1的各个像素2中形成有允许r、g或b的波长的光通过的滤色器37。
291.然而,如图29所示,可以采用去除了滤色器37的构造。在这种情况下,固态摄像元件1的像素2可以接收r、g和b的所有波长的光以生成并输出像素信号。
292.可替代地,代替滤色器37,固态摄像元件1可以设置有红外滤光器,该红外滤光器透射红外线以仅接收红外线,从而生成并输出像素信号。
293.《13.像素晶体管的布置示例》
294.将参照图30描述像素晶体管的布置示例。
295.在像素阵列3中,例如,在水平方向和垂直方向上重复图30所示的光电二极管pd和像素晶体管的布置。
296.图30是图示了总计16个像素的像素区域中的像素晶体管的布置示例的平面图,在该像素区域中,像素集51被布置成2
×
2形式并且其构成单位是以2
×
2(2个垂直像素
×
2个水平像素)形式的4个像素。在图30中,用黑色圆圈表示的部分表示电源、gnd或信号线的接触部分。需要注意,在图30中,为了防止附图复杂化,省略了一些附图标记。
297.在图30中,如图3所示的示例一样,形成有光电二极管pd、滤色器37(图30中未图示)和片上透镜38。具体地,两个光电二极管pd针对一个像素以纵向形状水平对称的形式被布置。片上透镜38针对各个像素被形成。滤色器37以像素集51为单位被布置成拜耳阵列。左上方的像素集51是包括g滤色器37的像素集51gr,右上方的像素集51是包括r滤色器37的像素集51r,左下方的像素集51是包括b滤色器37的像素集51b,并且右下方的像素集51是包括g滤色器37的像素集51gb。
298.如参照图4所述,包括4个像素的一个像素集51设置有8个光电二极管pd和8个传输晶体管tg、以及由这8个光电二极管pd和8个传输晶体管tg共用的fd 52、复位晶体管53、放大晶体管54和选择晶体管55。
299.如图30所示,包括在一个像素集51中的8个光电二极管pd以2
×
4(垂直2个
×
水平4个)的形式排列,并且由8个光电二极管pd共用的复位晶体管53、放大晶体管54和选择晶体管55被布置成与以2
×
4形式的8个光电二极管pd垂直地(纵向地)相邻。如果将由8个光电二极管pd共用的复位晶体管53、放大晶体管54和选择晶体管55统称为共用型像素晶体管,则共用型像素晶体管被布置在两个垂直地相邻的像素集51中的以2
×
4形式的8个光电二极管pd和8个光电二极管pd之间。
300.以2
×
2形式的4个光电二极管pd为一组,与光电二极管pd一一对应地设置的传输晶体管tg被布置在该组的中央附近。在像素集51的右组中,4个传输晶体管tg被集中地布置在以2
×
2形式的4个光电二极管pd的中央附近,并且在像素集51的左组中,4个传输晶体管tg被集中地布置在以2
×
2形式的4个光电二极管pd的中央附近。
301.fd 52至少包括金属布线52a作为其一部分。如图30所示,金属布线52a被布线成将像素集51的右组中的以2
×
2形式的4个光电二极管pd的中间部分、像素集51的左组中的以2
×
2形式的4个光电二极管pd的中间部分、放大晶体管54的栅电极和复位晶体管53的源电极电气连接。在像素集51中的各个光电二极管pd中累积的电荷通过相应的传输晶体管tg被传输到构成fd 52的一部分的金属布线52a,并且通过金属布线52a传输并提供给放大晶体管54的栅电极。此外,当复位晶体管53导通时,fd 52中的电荷从复位晶体管53的源电极排出到漏电极。
302.因此,对于共用型像素晶体管(复位晶体管53、放大晶体管54和选择晶体管55),可
以采用共用型像素晶体管被布置在一个像素集51的8个光电二极管pd和在列方向上相邻的另一像素集51的8个光电二极管pd之间的布局。需要注意,尽管未图示,但是可以使用共用型像素晶体管被布置在行方向上彼此相邻的像素集51的8个光电二极管pd和8个光电二极管pd之间的布局。
303.《14.电子设备的应用示例》
304.本技术不限于应用到固态摄像元件。具体地,本技术适用于使用固态摄像元件作为图像拍摄单元(光电转换部)的所有电子设备,诸如包括数码相机和摄像机的摄像装置、具有摄像功能的便携式终端装置以及使用固态摄像元件作为图像读取单元的复印机等。固态摄像元件可以被形成为一个芯片,或者可以是具有摄像功能的模块化形式,在该模块化形式中,摄像单元和信号处理单元或光学系统被封装在一起。
305.图31是图示了作为应用本技术的电子设备的摄像装置的构造示例的框图。
306.图31中的摄像装置200包括:包括透镜组等的光学单元201;使用图1中的固态摄像元件1的构造的固态摄像元件(摄像器件)202;以及作为相机信号处理电路的数字信号处理器(dsp:digital signal processor)电路203。此外,摄像装置200还包括帧存储器204、显示单元205、记录单元206、操作单元207和电源208。dsp电路203、帧存储器204、显示单元205、记录单元206、操作单元207和电源208经由总线209彼此连接。
307.光学单元201捕获来自被摄体的入射光(图像光),并且在固态摄像元件202的摄像表面上形成图像。固态摄像元件202逐个像素地将通过光学单元201而在摄像表面上形成为图像的入射光的量转换成电信号,并且将该电信号输出为像素信号。作为固态摄像元件202,能够使用图1中的固态摄像元件1,即能够同时获得用于生成高动态范围图像的信号和用于检测相位差的信号的固态摄像元件。
308.显示单元205例如包括诸如液晶显示器(lcd:liquid crystal display)或有机电致发光(el:electroluminescence)显示器等的薄型显示器,并且显示固态摄像元件202拍摄的运动图像或静止图像。记录单元206将固态摄像元件202拍摄的运动图像或静止图像记录在诸如硬盘或半导体存储器等的记录介质上。
309.操作单元207在用户的操作下发出关于摄像装置200的各种功能的操作命令。电源208将用作dsp电路203、帧存储器204、显示单元205、记录单元206和操作单元207的操作电源的各种电源适当地供应给这些供电对象。
310.如上所述,通过将应用上述实施例的固态摄像元件1用作固态摄像元件202,可以同时获得用于生成高动态范围图像的信号和用于检测相位差的信号。因此,诸如摄像机或数码相机等的摄像装置200或用于诸如便携式电话等的移动设备的相机模块也能够提高拍摄图像的质量。
311.《图像传感器的使用示例》
312.图32是图示了使用上述固态摄像元件1的图像传感器的使用示例的图。
313.使用上述固态摄像元件1的图像传感器能够用于例如如下的对诸如可见光、红外线、紫外线和x射线等的光进行感测的各种情况。
314.·
用于拍摄鉴赏用的图像的设备,诸如数码相机和具有相机功能的便携式设备等
315.·
用于交通用途的设备,诸如:为了诸如自动停止等的安全驾驶和识别驾驶员的状态等,用于对车辆的前方、后方、四周和内部等进行摄像的车载传感器;用于监视行驶车
辆和道路的监视相机;以及用于测量车辆之间等的距离的测距传感器等
316.·
用于诸如电视、冰箱和空调等的家用电器以对用户的手势进行摄像并且根据该手势执行设备操作的设备
317.·
用于医疗保健用途的设备,诸如内窥镜和通过接收红外线来进行血管摄像的设备等
318.·
用于安全用途的设备,诸如用于预防犯罪应用的监视相机和用于人员身份验证应用的相机等
319.·
用于美容用途的设备,诸如用于对皮肤进行摄像的皮肤测量仪和用于对头皮进行摄像的显微镜等
320.·
用于运动用途的设备,诸如用于运动应用的运动相机和可穿戴式相机等
321.·
用于农业用途的设备,诸如用于监视田地和农作物的状态的相机等
322.《15.内窥镜手术系统的应用示例》
323.根据本发明的技术(本技术)能够应用于各种产品。例如,根据本发明的技术可以应用于内窥镜手术系统。
324.图33是图示了能够应用根据本发明的技术(本技术)的内窥镜手术系统的示意性构造的示例的图。
325.图33图示了操作者(医生)11131正在使用内窥镜手术系统11000对病床11133上的患者11132进行手术的状态。如图所示,内窥镜手术系统11000包括内窥镜11100、包括气腹管11111和能量治疗仪器11112的其他手术器械11110、支撑内窥镜11100的支撑臂装置11120、以及安装有用于内窥镜手术的各种装置的推车11200。
326.内窥镜11100包括:镜筒11101,其具有插入到患者11132的体腔中的从远端起预定长度的区域;以及摄像头11102,其被连接到镜筒11101的近端。虽然在所示的示例中,图示了被形成为具有刚性镜筒11101的所谓的刚性镜的内窥镜11100,但是内窥镜11100可以被形成为具有柔性镜筒的所谓的柔性镜。
327.在镜筒11101的远端处设置有开口,在该开口中安装有物镜。光源装置11203被连接到内窥镜11100。由光源装置11203生成的光通过在镜筒11101的内部延伸的光导件被引导到镜筒11101的远端,并且该光通过物镜朝向患者11132的体腔中的观察目标照射。需要注意,内窥镜11100可以是前视内窥镜、斜视内窥镜或侧视内窥镜。
328.光学系统和摄像元件被设置在摄像头11102的内部。从观察目标反射的光(观察光)通过光学系统被会聚在摄像元件上。观察光通过摄像元件进行光电转换,并且生成与观察光对应的电信号,即与观察图像对应的图像信号。该图像信号作为raw数据被传输到相机控制单元(ccu:camera control unit)11201。
329.ccu 11201包括中央处理单元(cpu)或图形处理单元(gpu)等,并且对内窥镜11100和显示装置11202的操作进行集中控制。此外,ccu11201从摄像头11102接收图像信号,并且对该图像信号进行诸如显影处理(去马赛克)等的各种图像处理以显示基于图像信号的图像。
330.在ccu 11201的控制下,显示装置11202显示基于已经通过ccu11201进行了图像处理的图像信号的图像。
331.光源装置11203包括诸如发光二极管(led)等的光源,并且将在对手术部位等进行
摄像时的照射光供应给内窥镜11100。
332.输入装置11204是内窥镜手术系统11000的输入接口。用户能够通过输入装置11204将各种信息和输入指令输入到内窥镜手术系统11000。例如,用户输入指令以改变内窥镜11100的摄像条件(照射光的类型、放大倍率、焦距等)等。
333.治疗仪器控制装置11205控制用于组织烧灼、切开或血管密封等的能量治疗仪器11112的驱动。气腹装置11206通过气腹管11111将气体馈送到患者11132的体腔中以使体腔膨胀,以用于提供内窥镜11100的视野和提供操作者的工作空间的目的。记录器11207是能够记录与手术有关的各种信息的装置。打印机11208是能够以包括文本、图像和图表在内的各种形式打印与手术有关的各种信息的装置。
334.需要注意,将在对手术部位进行摄像时的照射光供应给内窥镜11100的光源装置11203可以包括白色光源,该白色光源包括例如led、激光光源或两者的组合。在白色光源包括rgb激光光源的组合的情况下,能够高精度地控制各种颜色(各种波长)的输出强度和输出时序。因此,光源装置11203能够调节拍摄图像的白平衡。此外,在这种情况下,通过以时分的方式向观察目标照射来自rgb激光光源中各者的激光,并且以与照射时序同步的方式控制摄像头11102的摄像元件的驱动,能够以时分的方式对与rgb一一对应的图像进行摄像。根据该方法,即使在摄像元件中没有设置滤色器的情况下,也能够获得彩色图像。
335.此外,可以控制光源装置11203的驱动,以便每隔预定时间就改变输出光的强度。通过以与光的强度变化的时序同步的方式控制摄像头11102的摄像元件的驱动并以时分的方式获得图像,并且通过合成图像,能够生成没有所谓的曝光不足和曝光过度的高动态范围图像。
336.此外,光源装置11203可以被构造成能够供应适合于特殊光观察的预定波段的光。在特殊光观察中,例如,进行如下的所谓的窄带成像:其中,通过利用身体组织中光吸收的波长依赖性向诸如粘膜的表层部分中的血管等的预定组织照射比普通观察时的照射光(即白色光)窄的波段的光,能够以高对比度对上述预定组织进行成像。可替代地,在特殊光观察中,可以进行通过照射激发光而产生的荧光来获得图像的荧光观察。荧光观察允许通过向身体组织照射激发光来进行来自身体组织的荧光的观察(自发荧光观察),或者允许通过将诸如吲哚菁绿(icg)等的试剂局部地注入到身体组织中并向该身体组织照射与该试剂的荧光波长对应的激发光来获得荧光图像等。光源装置11203可以被构造成能够供应适合于这种特殊光观察的窄带光和/或激发光。
337.图34是图示了图33所示的摄像头11102和ccu 11201的功能构造的示例的框图。
338.摄像头11102包括透镜单元11401、摄像单元11402、驱动单元11403、通信单元11404和摄像头控制单元11405。ccu 11201包括通信单元11411、图像处理单元11412和控制单元11413。摄像头11102和ccu11201通过传输电缆11400可通信地彼此连接。
339.透镜单元11401是光学系统,其被设置在与镜筒11101连接的部分处。从镜筒11101的远端引入的观察光被引导至摄像头11102,并进入透镜单元11401。透镜单元11401包括多个透镜的组合,该透镜包括变焦透镜和聚焦透镜。
340.摄像单元11402包括摄像元件。摄像单元11402可以包括单个摄像元件(所谓的单板式摄像单元),或者可以包括多个摄像元件(所谓的多板式摄像单元)。在摄像单元11402是多板式摄像单元的情况下,例如,摄像元件可以生成与rgb一一对应的图像信号,并且可
以对图像信号进行合成以获得彩色图像。可替代地,摄像单元11402可以包括一对摄像元件,以用于分别获得与3d(三维)显示对应的左眼用图像信号和右眼用图像信号。通过进行3d显示,操作者11131能够更准确地理解手术部位处的活体组织的深度。需要注意,在摄像单元11402是多板式摄像单元的情况下,可以针对对应的摄像元件来设置多个透镜单元11401。
341.此外,摄像单元11402可以不必设置在摄像头11102中。例如,摄像单元11402可以在镜筒11101的内部被设置在物镜正后方。
342.驱动单元11403包括致动器,并且在摄像头控制单元11405的控制下,驱动单元11403使透镜单元11401的变焦透镜和聚焦透镜沿着光轴移动预定距离。由此,能够适当地调节摄像单元11402拍摄的图像的放大倍率和焦点。
343.通信单元11404包括用于将各种信息传输到ccu 11201并从ccu11201接收各种信息的通信装置。通信单元11404通过传输电缆11400将从摄像单元11402获取的图像信号作为raw数据传输到ccu 11201。
344.此外,通信单元11404从ccu 11201接收用于控制摄像头11102的驱动的控制信号,并且通信单元11404将该控制信号供应给摄像头控制单元11405。控制信号例如包括与摄像条件有关的信息,诸如指定拍摄图像的帧频的信息、指定摄像时的曝光值的信息和/或指定拍摄图像的放大倍率和焦点的信息。
345.需要注意,诸如上述的帧频、曝光值、放大倍率和焦点等的摄像条件可以由用户适当地指定,或者可以由ccu 11201的控制单元11413基于获得的图像信号自动设定。在后一种情况下,在内窥镜11100上安装所谓的自动曝光(ae:auto exposure)功能、自动聚焦(af:auto focus)功能和自动白平衡(awb:auto white balance)功能。
346.摄像头控制单元11405基于通过通信单元11404接收的来自ccu11201的控制信号来控制摄像头11102的驱动。
347.通信单元11411包括用于将各种信息传输到摄像头11102并从摄像头11102接收各种信息的通信装置。通信单元11411通过传输电缆11400接收从摄像头11102传输的图像信号。
348.此外,通信单元11411将用于控制摄像头11102的驱动的控制信号传输到摄像头11102。图像信号和控制信号可以通过电气通信或光学通信等被传输。
349.图像处理单元11412对从摄像头11102传输的作为raw数据的图像信号进行各种图像处理。
350.控制单元11413进行用于通过内窥镜11100对手术部位等进行摄像和通过对手术部位等进行摄像而获得的拍摄图像的显示的各种控制。例如,控制单元11413生成用于控制摄像头11102的驱动的控制信号。
351.此外,控制单元11413基于已经通过图像处理单元11412进行了图像处理的图像信号使显示装置11202显示示出了手术部位等的拍摄图像。此时,控制单元11413可以使用各种图像识别技术来识别拍摄图像中的各种物体。例如,通过检测拍摄图像中所包括的物体的边缘的形状或颜色等,控制单元11413能够识别诸如钳子等的手术器械、特定的活体部位、出血和使用能量治疗仪器11112时的薄雾等。当使显示装置11202显示拍摄图像时,控制单元11413可以使用识别结果将各种手术支持信息叠加显示在手术部位的图像上。通过叠
加显示的并且呈现给操作者11131的手术支持信息,能够减轻操作者11131的负担,并且操作者11131能够可靠地进行手术。
352.用于连接摄像头11102和ccu 11201的传输电缆11400是用于电信号通信的电信号电缆、用于光学通信的光纤或用于电信号通信和光学通信的复合电缆。
353.这里,虽然在所示的示例中,通过使用传输电缆11400的配线来进行通信,但是可以通过无线电进行摄像头11102和ccu 11201之间的通信。
354.至此已经描述了能够应用根据本发明的技术的内窥镜手术系统的示例。根据本发明的技术能够应用于上述构造中的摄像单元11402。具体地,根据上述实施例的固态摄像元件1可以被应用为摄像单元11402。通过将根据本发明的技术应用于摄像单元11402,可以同时获得用于生成高动态范围图像的信号和用于检测相位差的信号。因此,可以获得高质量的拍摄图像和距离信息,并且可以提高驾驶员和车辆的安全度。
355.需要注意,尽管这里已经以内窥镜手术系统为例进行了描述,但是根据本发明的技术还可以应用于例如显微手术系统等。
356.《16.移动体的应用示例》
357.根据本发明的技术(本技术)能够应用于各种产品。例如,根据本发明的技术可以被实现为安装在任何类型的移动体上的装置,所述移动体诸如是汽车、电动汽车、混合动力电动汽车、摩托车、自行车、个人移动设备、飞机、无人机、船舶和机器人等。
358.图35是图示了作为能够应用根据本发明的技术的移动体控制系统的示例的车辆控制系统的示意性构造示例的框图。
359.车辆控制系统12000包括经由通信网络12001连接的多个电子控制单元。在图35所示的示例中,车辆控制系统12000包括驱动系统控制单元12010、车身系统控制单元12020、车外信息检测单元12030、车内信息检测单元12040和集成控制单元12050。此外,将微型计算机12051、声音/图像输出单元12052和车载网络接口(i/f)12053图示为集成控制单元12050的功能构造。
360.驱动系统控制单元12010根据各种程序控制与车辆的驱动系统有关的装置的操作。例如,驱动系统控制单元12010起到以下装置的控制装置的作用:用于产生车辆驱动力的驱动力产生装置,诸如内燃机或驱动电机等;用于将驱动力传递至车轮的驱动力传递机构;用于调节车辆转向角的转向机构;和用于产生车辆制动力的制动装置等。
361.车身系统控制单元12020根据各种程序控制安装在车体上的各种装置的操作。例如,车身系统控制单元12020起到无钥匙进入系统、智能钥匙系统、电动窗装置或包括车头灯、车尾灯、刹车灯、指示灯和雾灯在内的各种灯的控制装置的作用。在这种情况下,车身系统控制单元12020能够接收从替代钥匙的便携式装置传输的无线电波或各种开关的信号的输入。车身系统控制单元12020接收这些无线电波或信号的输入,并且控制车辆的门锁装置、电动窗装置和灯等。
362.车外信息检测单元12030检测与配备有车辆控制系统12000的车辆的外部有关的信息。例如,摄像单元12031被连接到车外信息检测单元12030。车外信息检测单元12030使摄像单元12031对车辆外部的图像进行拍摄并且接收拍摄的图像。基于接收到的图像,车外信息检测单元12030可以对人、车辆、障碍物、标志或路面上的文字等进行物体检测处理或测距处理。
363.摄像单元12031是光学传感器,其接收光并且输出与接收的光量对应的电信号。摄像单元12031能够将电信号作为图像输出,或者能够将电信号作为测距信息输出。此外,摄像单元12031接收到的光可以是可见光,或者可以是诸如红外线等的不可见光。
364.车内信息检测单元12040检测车辆内部的信息。例如,用于检测驾驶员的状态的驾驶员状态检测单元12041被连接到车内信息检测单元12040。驾驶员状态检测单元12041例如包括用于对驾驶员进行摄像的相机。基于从驾驶员状态检测单元12041输入的检测信息,车内信息检测单元12040可以计算驾驶员的疲劳程度或专注程度,或者可以判断驾驶员是否正在打瞌睡。
365.微型计算机12051能够基于车外信息检测单元12030或车内信息检测单元12040获得的车辆外部或内部的信息来计算驱动力产生装置、转向机构或制动装置的控制目标值,并且微型计算机12051将控制命令输出到驱动系统控制单元12010。例如,微型计算机12051能够进行旨在实现高级驾驶员辅助系统(adas:advanced driver assistance system)的功能的协同控制,该功能包括车辆碰撞规避或冲击缓和、基于车间距离的跟车驾驶、车辆速度维持驾驶、车辆碰撞警告和车辆偏离车道警告等。
366.此外,基于由车外信息检测单元12030或车内信息检测单元12040获得的车辆周围的信息,微型计算机12051能够通过控制驱动力产生装置、转向机构或制动装置等来进行旨在不依赖于驾驶员的操作而自主行驶的自动驾驶的协同控制。
367.此外,微型计算机12051能够基于由车外信息检测单元12030获得的车辆外部的信息而将控制命令输出到车身系统控制单元12020。例如,通过根据由车外信息检测单元12030检测到的前行车辆或对向车辆的位置来控制车头灯或将远光切换为近光等,微型计算机12051可以进行旨在防止眩光的协同控制。
368.声音/图像输出单元12052将声音和图像中的至少一者的输出信号传输到输出装置,该输出装置能够将信息以视觉或听觉的方式通知车辆的乘员或车辆的外部。在图35的示例中,将音频扬声器12061、显示单元12062和仪表板12063图示为输出装置。例如,显示单元12062可以包括车载显示器和平视显示器中的至少一者。
369.图36是图示了摄像单元12031的安装位置的示例的图。
370.在图36中,车辆12100包括作为摄像单元12031的摄像单元12101、12102、12103、12104和12105。
371.摄像单元12101、12102、12103、12104和12105例如被设置在诸如车辆12100的前鼻、侧视镜、后保险杠或后门、以及车厢内挡风玻璃的上部等的位置处。设置在前鼻处的摄像单元12101和设置在车厢内挡风玻璃的上部处的摄像单元12105主要获得车辆12100前方的图像。设置在侧视镜处的摄像单元12102和12103主要获得车辆12100侧面的图像。设置在后保险杠或后门处的摄像单元12104主要获得车辆12100后方的图像。由摄像单元12101和12105获得的前方图像主要用于检测前行车辆、行人、障碍物、交通信号灯、交通标志或车道等。
372.需要注意,图36图示了摄像单元12101至12104的摄像范围的示例。摄像范围12111表示设置在前鼻处的摄像单元12101的摄像范围,摄像范围12112和12113分别表示设置在侧视镜处的摄像单元12102和12103的摄像范围,并且摄像范围12114表示设置在后保险杠或后门处的摄像单元12104的摄像范围。例如,通过将摄像单元12101至12104拍摄的图像数
据叠加,获得从上方观察的车辆12100的俯瞰图像。
373.摄像单元12101至12104中的至少一者可以具有获得距离信息的功能。例如,摄像单元12101至12104中的至少一者可以是包括多个摄像元件的立体相机,或者可以是包括用于相位差检测的像素的摄像元件。
374.例如,微型计算机12051可以基于从摄像单元12101至12104获得的距离信息来确定与摄像范围12111至12114内的三维物体之间的距离以及该距离的时间变化(相对于车辆12100的相对速度),由此特别地提取如下的最近的三维物体作为前行车辆:该三维物体位于车辆12100的行驶路径上,并且该三维物体以预定速度(例如,等于或大于0km/h)在与车辆12100大致相同的方向上行驶。此外,在预先设定要在前行车辆前方提供的车间距离的情况下,微型计算机12051能够进行自动制动控制(包括跟随停止控制)和自动加速控制(包括跟随开始控制)等。因此,可以进行旨在不依赖于驾驶员的操作而自主行驶的自动驾驶等的协同控制。
375.例如,微型计算机12051可以基于从摄像单元12101至12104获得的距离信息来提取与分类为两轮车、普通车辆、大型车辆、行人和诸如电线杆等的其他三维物体的三维物体有关的三维物体数据,以用于自动规避障碍物。例如,对于车辆12100周围的障碍物,微型计算机12051区分为车辆12100的驾驶员能够视觉识别的障碍物和难以视觉识别的障碍物。然后,微型计算机12051确定用于指示与各个障碍物的碰撞危险度的碰撞风险。在碰撞风险等于或高于设定值并且存在碰撞可能性的情况下,通过经由音频扬声器12061或显示单元12062向驾驶员输出警告,或者通过经由驱动系统控制单元12010进行强制减速或规避转向,微型计算机12051能够进行辅助驾驶以规避碰撞。
376.摄像单元12101至12104中的至少一者可以是用于检测红外线的红外相机。例如,微型计算机12051能够通过判断摄像单元12101至12104的拍摄图像中是否存在行人来识别行人。例如,通过如下的过程进行行人识别:对作为红外相机的摄像单元12101至12104的拍摄图像中的特征点进行提取的过程;以及对表示物体轮廓的一系列特征点进行图案匹配以判断物体是否是行人的过程。当微型计算机12051确定摄像单元12101至12104的拍摄图像中存在行人且识别出行人时,声音/图像输出单元12052控制显示单元12062,以叠加显示用于强调识别出的行人的矩形轮廓。可替代地,声音/图像输出单元12052可以控制显示单元12062,以便将表示行人的图标等显示在期望的位置处。
377.至此已经描述了能够应用根据本发明的技术的车辆控制系统的示例。根据本发明的技术能够应用于上述构造之中的摄像单元12031。具体地,根据上述实施例的固态摄像元件1可以应用为摄像单元12031。通过将根据本发明的技术应用于摄像单元12031,可以同时获得用于生成高动态范围图像的信号和用于检测相位差的信号。因此,可以获得高质量的拍摄图像和距离信息,并且可以提高驾驶员和车辆的安全度。
378.在上述示例中,已经描述了第一导电类型为p型且第二导电类型为n型的使用电子作为信号电荷的固态摄像元件。本技术还适用于使用空穴作为信号电荷的固态摄像元件。即,在第一导电类型为n型且第二导电类型为p型的情况下,上述的各个半导体区域可以由导电类型相反的半导体区域形成。
379.本技术的实施例不限于上述实施例,并且可以在不脱离本技术的主旨的情况下进行各种修改。
380.例如,可以使用将上述实施例中的全部或一部分实施例进行组合的形式。
381.应当注意,本说明书中描述的效果仅是示例,而不是限制性的。可以包括本说明书中描述的效果以外的效果。
382.需要注意,本技术也可以采用以下构造。
383.(1)一种固态摄像元件,其包括:
384.与多种颜色对应的多个像素集,各个所述像素集包括具有相同颜色的滤色器的多个像素,并且各个所述像素包括多个光电转换部。
385.(2)根据上述(1)所述的固态摄像元件,其中,
386.各个所述像素包括在垂直方向或水平方向上对称地布置的两个所述光电转换部,并且
387.所述像素的所述光电转换部的布置方向至少在各个单独的所述像素集中是同一方向。
388.(3)根据上述(2)所述的固态摄像元件,其中,
389.所述像素的所述光电转换部的所述布置方向在所有的所述像素集中是同一方向。
390.(4)根据上述(1)所述的固态摄像元件,其中,
391.各个所述像素包括在垂直方向或水平方向上对称地布置的两个所述光电转换部,并且
392.在各个所述像素集中,在所述水平方向上布置的两个所述像素的所述光电转换部的布置方向是同一方向。
393.(5)根据上述(1)所述的固态摄像元件,其中,
394.各个所述像素包括在垂直方向或水平方向上对称地布置的两个所述光电转换部,并且
395.在各个所述像素集中,在所述水平方向上布置的两个所述像素的所述光电转换部的布置方向是正交方向。
396.(6)根据上述(1)至(5)中任一项所述的固态摄像元件,其中,
397.各个所述像素的所述多个光电转换部通过绝缘层而彼此隔离。
398.(7)根据上述(1)至(5)中任一项所述的固态摄像元件,其中,
399.各个所述像素的所述多个光电转换部通过与所述光电转换部的导电类型相反的导电类型的杂质层而彼此隔离。
400.(8)根据上述(7)所述的固态摄像元件,其中,
401.所述杂质层形成的位垒低于像素边界处的位垒。
402.(9)根据上述(1)至(8)中任一项所述的固态摄像元件,其中,
403.多个所述像素集之中的一些像素集中形成有遮光膜,所述遮光膜为各个所述像素集中的所有所述像素部分地遮光。
404.(10)根据上述(1)至(8)中任一项所述的固态摄像元件,其中,
405.多个所述像素集之中的一些像素集中形成有遮光膜,所述遮光膜为各个所述像素集中的一些所述像素完全遮光。
406.(11)根据上述(1)至(10)中任一项所述的固态摄像元件,其还包括:
407.电荷保持部,所述电荷保持部保持在所述光电转换部中生成的电荷,
408.所述电荷保持部将在所述多个像素的所述光电转换部中生成的电荷相加并输出。
409.(12)根据上述(11)所述的固态摄像元件,其中,
410.所述电荷保持部将在各个所述像素集中的所有所述像素的所述光电转换部中生成的电荷相加并输出。
411.(13)根据上述(11)所述的固态摄像元件,其中,
412.所述电荷保持部将在各个所述像素集中所包括的所述多个像素的所述光电转换部之中的在所述像素中的位置为相同位置的所述光电转换部中的电荷相加并输出。
413.(14)根据上述(1)至(13)中任一项所述的固态摄像元件,其中,
414.在各个所述像素集中所包括的所述多个像素的所述光电转换部之中,第一光电转换部和第二光电转换部被曝光不同的曝光时间。
415.(15)根据上述(14)所述的固态摄像元件,其还包括:
416.控制单元,所述控制单元进行控制以将各个所述光电转换部接收的光的电荷作为像素信号输出,
417.所述控制单元输出被曝光第一曝光时间的所述第一光电转换部的第一像素信号,然后输出被曝光第二曝光时间的所述第二光电转换部的第二像素信号。
418.(16)根据上述(1)至(15)中任一项所述的固态摄像元件,其中,
419.分别地输出在各个所述像素集中所包括的所述多个像素之中的至少一些像素的所述多个光电转换部中生成的像素信号。
420.(17)根据上述(1)至(16)中任一项所述的固态摄像元件,其中,
421.在各个所述像素集中所包括的所述多个像素之中,第一像素的所述光电转换部被曝光第一曝光时间,第二像素的所述光电转换部被曝光第二曝光时间,所述第二曝光时间比所述第一曝光时间短,并且分别地输出在被曝光所述第二曝光时间的所述第二像素的所述多个光电转换部中生成的像素信号。
422.(18)根据上述(1)至(16)中任一项所述的固态摄像元件,其中,
423.在各个所述像素集中所包括的所述多个像素之中,第一像素的所述光电转换部被曝光第一曝光时间,第二像素的所述光电转换部被曝光第二曝光时间,所述第二曝光时间比所述第一曝光时间短,第三像素的所述光电转换部被曝光第三曝光时间,所述第三曝光时间比所述第二曝光时间短,并且分别地输出在被曝光所述第二曝光时间的所述第二像素的所述多个光电转换部中生成的像素信号。
424.(19)根据上述(1)至(18)中任一项所述的固态摄像元件,其中,
425.所述像素集中的所述滤色器被布置成拜耳阵列。
426.(20)一种电子设备,其包括固态摄像元件,所述固态摄像元件包括:
427.与多种颜色对应的多个像素集,各个所述像素集包括具有相同颜色的滤色器的多个像素,并且各个所述像素包括多个光电转换部。
428.附图标记列表
[0429]1ꢀꢀ
固态摄像元件
[0430]2ꢀꢀ
像素
[0431]
pd
ꢀꢀ
光电二极管
[0432]
tg
ꢀꢀ
传输晶体管
[0433]3ꢀꢀ
像素阵列
[0434]5ꢀꢀ
列信号处理电路
[0435]
12
ꢀꢀ
半导体基板
[0436]
31、32
ꢀꢀ
半导体区域
[0437]
36
ꢀꢀ
像素间遮光膜
[0438]
37
ꢀꢀ
滤色器
[0439]
38
ꢀꢀ
片上透镜
[0440]
51
ꢀꢀ
(51gr、51gb、51r、51b)
ꢀꢀ
像素集
[0441]
91
ꢀꢀ
片上透镜
[0442]
101 绝缘层
[0443]
102 杂质层
[0444]
121 遮光膜
[0445]
200 摄像装置
[0446]
202 固态摄像元件
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1