用于非视距远程遥控驾驶的装载机作业引导系统的制作方法
本技术属于装载机作业引导,具体涉及一种用于非视距远程遥控驾驶的装载机作业引导系统。
背景技术:
1、冶金是指开采、精选、烧结金属矿石并对其进行冶炼、加工成金属材料。因其行业的特殊性,工作场景内部作业面上,多为人工驾驶特种工程机械车辆,在此类特殊工况下进行危险性较大的工作。比如炉下清渣、煤场归堆、焦化沥青处理、船底清舱等,工作环境均存在高粉尘、热辐射、有毒有害气体、强酸强腐蚀、视野受限及人身伤害等诸多作业问题。
2、现有技术方案在应对此类作业面内无人化应用问题时,通常采用通过网络进行作业车辆的远距离遥控,但是现有的遥控驾驶系统需要驾驶员主动进行遥控驾驶作业,操作强度高且驾驶员操作过程中易受视野范围因素影响,容易造成驾驶员驾驶疲劳,驾驶体验不好,进而造成作业效率较低的问题。
技术实现思路
1、为此,本技术提供用于非视距远程遥控驾驶的装载机作业引导系统,有助于帮助解决目前驾驶员进行遥控装载作业时操作强度高,作业效率较低,且驾驶员易受视野范围因素影响,容易造成驾驶员驾驶疲劳,驾驶体验不好的问题。
2、为实现以上目的,本技术采用如下技术方案:
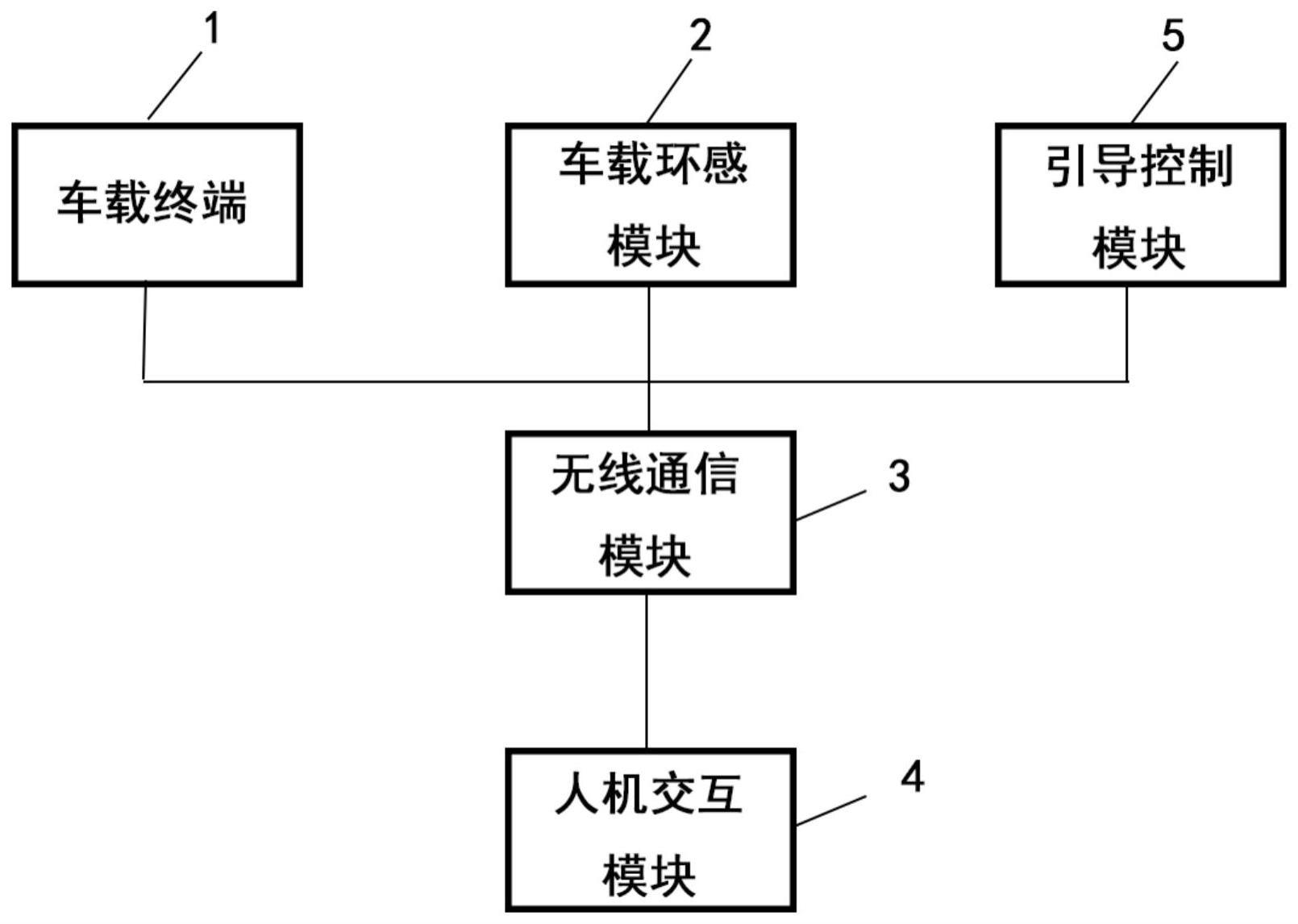
3、本技术提供用于非视距远程遥控驾驶的装载机作业引导系统,包括:
4、车载终端,用于采集装载机的车辆数据;
5、车载环感模块,用于采集装载机的车载传感器数据;
6、无线通信模块,用于与驾驶舱的人机交互模块进行组网无线通信,所述无线通信模块将车载传感器数据和车辆数据发送至人机交互模块并接收人机交互模块的作业任务及作业目标;
7、人机交互模块,用于基于车载传感器数据和车辆数据建立引导模型,设置作业任务及作业目标,以及收集装载机引导作业数据并对引导作业数据进行大数据分析,依据引导作业数据构建数字模型,同时结合大数据分析结果模拟现实装载机作业场景,根据数字模型对引导作业过程进行作业评价;
8、引导控制模块,用于接收人机交互模块的作业任务及作业目标引导装载机进行作业。
9、进一步地,所述人机交互模块具体包括触摸屏、运算单元、传感器标定单元和任务交互单元;
10、触摸屏,与运算单元连接,用于显示装载机的车载传感器数据、车辆数据和装载机作业场景,并接收驾驶员输入的操作指令;
11、运算单元,分别与触摸屏、传感器标定单元和任务交互单元连接,用于基于车载传感器数据和车辆数据,采用多重数据复合叠加转换方式建立引导模型,并定义引导模型功能;
12、传感器标定单元用于对车载环感模块进行预标定,预标定的信息包括:车辆基础属性信息、姿态基准点信息、障碍物分类信息及引导线标尺信息;
13、任务交互模块用于依据引导模型功能,预制装载机的作业任务及作业目标,作业任务及作业目标包括作业任务类型、作业任务角度范围、作业任务时长、作业任务等级及评价规则;
14、运算单元还用于收集装载机引导作业数据进行存储,并对引导作业数据进行大数据分析,依据引导作业数据构建数字模型,同时结合大数据分析结果模拟现实装载机作业场景,根据数字模型对引导作业过程进行作业评价。
15、进一步地,所述车载环感模块包括倾角仪、角度编码器、激光雷达、惯性测量单元、ai摄像头、称重阀块和定位模块;
16、倾角仪设置有两个,分别安装在装载机动臂和转斗处,用于采集动臂和转斗的姿态信息;
17、角度编码器安装在装载机车体铰接处,用以采集装载机前后车体的相对姿态角;
18、激光雷达设置有三个,分别安装在装载机驾驶室的左侧、右侧及后方,用于采集装载机左侧、右侧及后方的激光点云数据;
19、惯性测量单元安装在装载机前车体的大灯位置处,用于采集装载机的车辆姿态信息;
20、ai摄像头设置有四个,分别安装于装载机驾驶室上方左侧、前侧、右侧及后侧,用于采集装载机周围360度环视影像数据;
21、称重阀块安装在装载机工装液压油路上,用于采集装载机工装装卸物料的重量;
22、定位模块安装在装载机驾驶室的顶部,用于采集露天场景下装载机的定位数据。
23、进一步地,所述车载传感器数据包括动臂倾角、转斗倾角、铰接转角、激光点云数据、惯性测量姿态数据、环视影像数据、物料重量、定位数据、高程及航向信息;所述车辆数据包括发动机转速、点火状态、转向灯状态、远近光灯状态、驻车状态、挡位状态、雨刷状态、喇叭状态、冷却风扇状态和变速箱动力状态。
24、进一步地,所述无线通信模块安装在装载机驾驶室顶部,采用tcp/ip协议建立通信机制进行无线通信;所述无线通信模块为宽带自组网设备或4g/5g无线路由器。
25、进一步地,所述收集装载机引导作业数据并对引导作业数据进行大数据分析具体包括:在装载机的引导作业过程中,人机交互模块利用车载环感模块收集实时的车载传感器数据,同时通过触摸屏收集驾驶员操作记录,并建立时序数据库存储车载传感器数据和驾驶员操作记录;
26、利用数据挖掘算法对时序数据库中存储的车载传感器数据和驾驶员操作记录进行数据挖掘,建立驾驶员操作记录与装载机车辆运行状态之间的对应关系序列。
27、进一步地,所述依据引导作业数据构建数字模型具体包括:
28、利用车载传感器数据中的动臂倾角、转斗倾角、铰接转角、激光点云数据、惯性测量姿态数据、环视影像数据、物料重量和定位数据,结合装载机作业面的高清三维地图进行三维坐标转换,在3d地图上构建出3d数字孪生可视化数字模型。
29、进一步地,所述引导模型功能包括一键方平、一键举升、料堆识别、路线规划、盲区检测、安全预警、自主装卸和作业统计。
30、本技术采用以上技术方案,至少具备以下有益效果:
31、通过用于非视距远程遥控驾驶的装载机作业引导系统,其包括车载终端,用于采集装载机的车辆数据;车载环感模块,用于采集装载机的车载传感器数据;无线通信模块,用于与驾驶舱的人机交互模块进行组网无线通信,所述无线通信模块将车载传感器数据和车辆数据发送至人机交互模块并接收人机交互模块的作业任务及作业目标;人机交互模块,用于基于车载传感器数据和车辆数据建立引导模型,设置作业任务及作业目标,以及收集装载机引导作业数据并对引导作业数据进行大数据分析,依据引导作业数据构建数字模型,同时结合大数据分析结果模拟现实装载机作业场景,根据数字模型对引导作业过程进行作业评价;引导控制模块,用于接收人机交互模块的作业任务及作业目标引导装载机进行作业。在该系统结构下,本技术方案通过车载终端和车载环感模块实时采集车辆数据和车载传感数据,并通过无线通信模块上传数据到人机交互模块构建出引导模型,驾驶员通过人机交互模块构建的引导模型来设置装载机的作业任务及作业目标,并将作业任务及作业目标下发至装载机的引导控制模块,控制装载机进行引导作业,降低了驾驶员的操作强度。同时,人机交互模块通过车载终端和车载环感模块实时收集装载机引导作业数据并对引导作业数据进行大数据分析,依据引导作业数据构建数字模型,同时结合大数据分析结果模拟现实装载机作业场景,减少了引导作业过程中视野范围环境因素对驾驶员的影响,减缓了驾驶疲劳,提高了驾驶体验。
32、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!