一种用于复杂地形多信号源的图传信号自动切换方法、系统及存储介质与流程
本发明涉及通信,尤其涉及种用于复杂地形多信号源的图传信号自动切换方法。
背景技术:
1、图传信号图传就是通过无线网络高科学技术将视频影音进行压缩再通过一定的方式实时的传送到所需要的终端上面去的一种高科技传送方式。这种传送方式的不同就在于它可以通过无线网络进行传送,不需要在通过各种线路或者一些特定条件进行传送,更加方便安装和使用。
2、当前关于信号的自动切换,设备通常被设计为仅在当前信号出现故障后才会启动切换机制,且切换到其他信号后不会主动切换回原来的信号,导致可能出现质量更好的信号时被闲置的情况;此外,设备在切换信号的过程中不能够很好的利用多种有效信息进行综合判断,而无法及时找到并切换至最佳的信号,从而无法实现灵活的信号自动切换。
3、针对上述问题,本发明提供了一种用于复杂地形多信号源的图传信号自动切换方法,其优点:
4、1.巡检机器人在复杂地形进行安全巡检时,如尾矿库坝面等情况下的安全巡检,产生多种信息,综合多种有效信息,做出信号自动切换。
5、2.在复杂地形中,只采用一种方式进行判断信号是否切换,鲁棒性较低,信号传输过程中,不能够及时的进行合格的图传信号,导致有些灾害并不能被发现,影响巡检效果,本种自动切换信号的方法提高了巡检机器人收发信号的鲁棒性。
技术实现思路
1、本发明提出一种用于复杂地形多信号源的图传信号自动切换方法,以更加确切地解决上述所述巡检机器人信号强度弱的问题,可以更好的切换信号,保证巡检机器人的图传信号。
2、为解决上述技术问题,本发明采用以下技术方案:
3、一种用于复杂地形多信号源的图传信号自动切换方法,包括以下步骤:
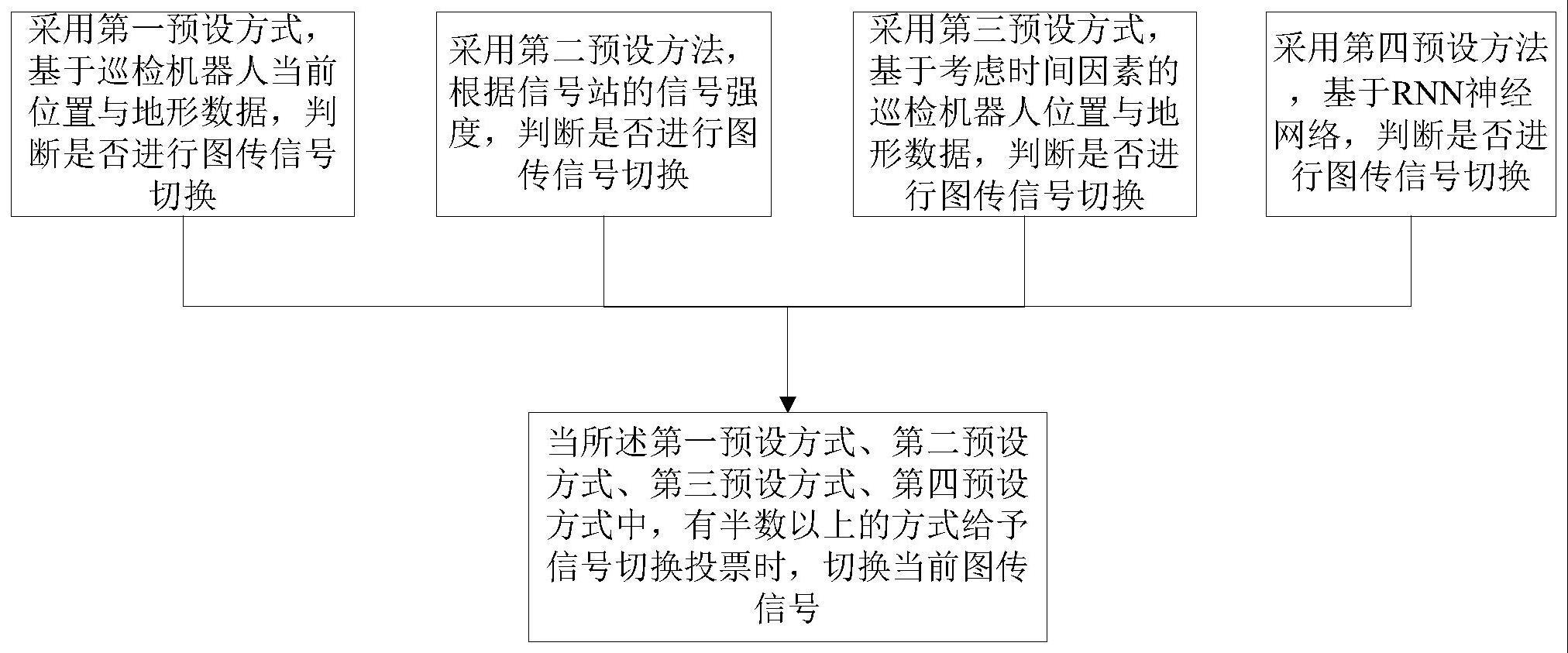
4、采用第一预设方式,基于巡检机器人当前位置与地形数据,判断是否进行图传信号切换;
5、采用第二预设方法,根据信号站的信号强度,判断是否进行图传信号切换;
6、采用第三预设方式,基于考虑时间因素的巡检机器人位置与地形数据,判断是否进行图传信号切换;
7、采用第四预设方法,基于rnn神经网络,判断是否进行图传信号切换;
8、当所述第一预设方式、第二预设方式、第三预设方式、第四预设方式中,有半数以上的方式给予信号切换投票时,切换当前图传信号。
9、进一步地,所述采用第一预设方式,基于巡检机器人当前位置与地形数据,判断是否进行图传信号切换,具体包括:
10、确定巡检机器人距离两个信号站的距离,以信号站所在的空间坐标为球的球心,以巡检机器人距离信号站的距离为球的半径,形成两个球函数,再根据两个信号站的空间坐标信息,计算球函数相交的空间坐标(xi,yi,zi),形成巡检机器人空间坐标集d1,(xi,yi,zi)∈d1;
11、根据复杂地形的位置的地形地貌空间坐标(xj,yj,zj),形成集合d2,其中(xj,yj,zj)∈d2;结合坐标集d1,求出集合d1和集合d2交集得到集合d3,其中d3=dl∩d2;
12、记录巡检机器人上一时刻空间坐标(xhi,yhi,zhi),结合上一时刻的空间坐标,计算集合d3空间坐标的置信度集合p1,选取置信度最高的空间坐标,作此时刻巡检机器人的第一空间坐标(xni,yni,zni);
13、将数据输入到支持向量机,给出投票结果t1,t1=0时,不更改当前图传信号,t1=1时,更改当前图传信号。
14、进一步地,所述的支持向量机的工作方法包括:
15、获取不同巡检机器人在不同位置处信号数据;
16、将数据输入到对应的支持向量机的模型中;
17、计算支持向量机中对应参数,得到支持向量机模型。
18、将巡检机器人的坐标输入到支持向量机中,得到是否切换图传信号。
19、进一步地,所述采用第二预设方法,根据信号站的信号强度,判断是否进行图传信号切换,具体包括:
20、获取两个信号站的信号强度,判断当前信号强度是否为最强信号;
21、若为否,则对最强的信号进行稳定性检测,所述稳定性检测是通过mtbf系数测试计算出信号的故障时间;
22、根据故障时间在信号的运行时间中所占的比例,得到对应信号的稳定性比率;
23、判断信号稳定性是否满足若图传信号的要求,并给出投票结果t2,t2=0时,不更改当前图传信号,t2=1时,更改当前图传信号。
24、进一步地,所述的mtbf系数测试,具体包括:
25、通过mtbf系数测试出信号的故障时间的具体步骤如下:
26、通过图片传输模式,记录开始时间downtime,记录结束时间uptime,获取mtbf系数测试中的传输故障次数failuretimes:
27、计算mtbf系数,以判断信号的稳定性。
28、进一步地,所述采用第三预设方式,基于考虑时间因素的巡检机器人位置与地形数据,判断是否进行图传信号切换,具体包括:
29、获取当前巡检机器人的速度,确定巡检机器人距离两个信号站的距离时间,根据速度和时间,对距离信号站的距离进行修正,以信号站所在的空间坐标为球的球心,以巡检机器人距离信号站的距离为球的半径,形成两个球函数,再根据两个信号站的空间坐标信息,计算球函数相交的空间坐标(xi’,yi’,zi’),形成巡检机器人空间坐标集d4,(xi’,yi’,zi’)∈d4;
30、根据复杂地形的位置的地形地貌空间坐标(xj’,yj’,zj’),形成集合d5,其中(xj’,yj’,zj’)∈d5,结合坐标集d4,求出集合d4和集合d5交集得到集合d6,其中d6=d4∩d5;
31、记录巡检机器人上一时刻空间坐标(xhi,yhi,zhi),结合上一时刻的空间坐标,计算集合d6空间坐标的置信度集合p2,选取置信度最高的空间坐标,作此时刻巡检机器人的第二空间坐标(xni’,yni’,zni’);
32、将数据输入到支持向量机,给出投票结果t3,t3=0时,不更改当前图传信号,t3=1时,更改当前图传信号。
33、进一步地,所述采用第四预设方法,基于rnn神经网络,判断是否进行图传信号切换,具体包括:
34、获取巡检机器人的距离信号站的距离,作为rnn神经网络的参数;
35、获取当前巡检机器人接收到两个信号站的信号强度和质量,作为rnn神经网络的参数;
36、获取巡检机器人当前的速度,作为rnn神经网络的参数;
37、将参数输入到rnn网络,给出投票结果t4,t4=0时,不更改当前图传信号,t4=1时,更改当前图传信号。
38、进一步地,所述当所述第一预设方式、第二预设方式、第三预设方式、第四预设方式中,有半数以上的方式给予信号切换投票时,切换当前图传信号,具体包括:
39、t1,t2,t3,t4分别表示第一、第二、第三、第四预设方式下的投票结果,值为0时,表示不更改当前图传信号,值为1时,表示更改当前图传信号;
40、根据t1,t2,t3,t4得到t,其中当t≥2,切换当前图传信号。
41、此外,还涉及一种用于复杂地形多信号源的图传信号自动切换系统,其特征在于:包括存储器、处理器和储存在存储器上的计算机程序,在处理器上运行的所述计算机程序,其中所述处理器执行所述计算机程序时实现所述的用于复杂地形多信号源的图传信号自动切换方法。
42、此外,还涉及一种计算机可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现所述用于复杂地形多信号源的图传信号自动切换方法。
43、本发明的有益效果:
44、巡检机器人在复杂地形巡检时,获取巡检机器人与信号站之间的距离,根据复杂地形地貌的空间坐标,上一时刻巡检机器人所在的空间坐标,计算出当前巡检机器人所在空间坐标置信度,选择置信度最高的空间坐标作为当前位置,并给出是否切换信号;
45、其次根据信号的强弱程度,信号的质量,判断当前信号强度和质量是否为最优情况,若为否,则对信号的稳定性进行检测,通过mtbf系数测试方法,计算得到信号是否稳定,若满足图传信号的要求,给出是否切换信号;
46、其次考虑时间因素的影响,获取当前巡检机器人的速度,根据信号站测定的距离,对其进行修正,获得当前空间坐标,根据复杂地形地貌的空间坐标,上一时刻巡检机器人所在的空间坐标,计算出当前巡检机器人所在空间坐标置信度,选择置信度最高的空间坐标作为当前空间坐标,并给出是否切换信号;
47、其次通过获取巡检机器人距离信号站的距离,获取巡检机器人的当前速度,获取信号站的强度和质量,采用rnn网络进行判断是否切换信号,最后统计投票,最后给出是否切换信号的指令。
48、本发明可以巡检机器人的尾矿库坝面在复杂地形巡检自动选择最优的图传信号源进行连接,充分利用了信息,保证了巡检机器人在复杂地形中的图传的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!