反向散射RIS辅助无人机使能的MEC能效最大化方法
本发明属于无线通信,进一步涉及边缘计算技术,具体为一种反向散射可重构智能表面ris辅助无人机使能的移动边缘计算mec能效最大化方法,可用于mec系统中低功耗通信和通信链路受阻场景下物联网设备卸载任务。
背景技术:
1、mec可通过将繁重的计算任务从物联网设备转移到边缘来缓解设备有限计算能力的挑战。此外,由于严格的成本和尺寸限制,物联网设备的电池容量有限。为了减轻有限能源供应的不利影响,反向散射通信引起了广泛关注。
2、反向散射通信通过反射外部环境射频信号有效降低物联网设备的能耗,并且可以通过能量收集供电。y.ye,l.shi,x.chu等人在其发表的论文“resourceallocation inbackscatter-assisted wireless powered mec networks with limited meccomputation capacity”(ieee transactions on wireless communications,2022:10678-10694)中提出了通过联合优化时间分配、通信资源和本地计算频率的一种反向散射辅助mec网络中的能效最大化方案。l.shi,y.ye,x.chu等人在其发表的论文“computationbits maximization in a backscatter assisted wirelessly powered mec network”(ieee communications letters,2021:528-532)中考虑了反向散射辅助mec网络中的吞吐量最大化问题,共同优化通信和计算资源、反向散射反射系数和时间分配。上述现有技术方案均考虑到固定的射频能量源,然而,固定的射频能量源和物联网设备经常被地面障碍物遮挡,导致信号阻塞和阴影,因此很难建立可靠的能量传输链路。此外,物联网设备与基站之间同样也受到地面障碍物的遮挡,导致物联网设备无法与地面基站建立有效的地面无线通信。
技术实现思路
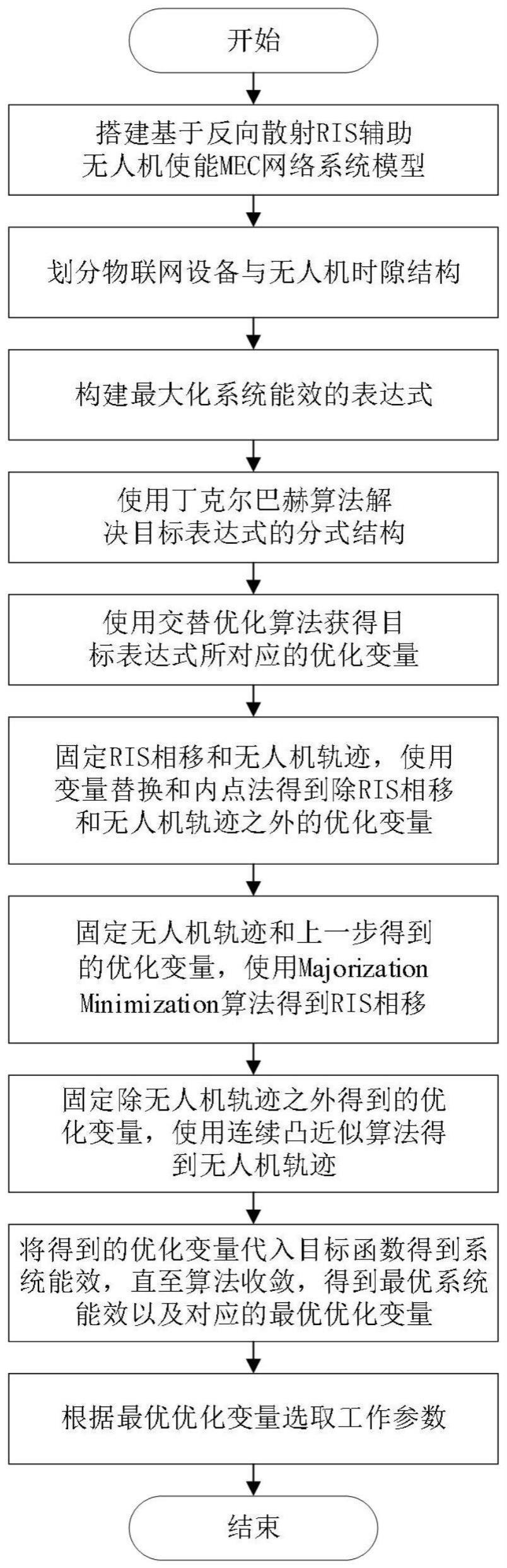
1、本发明目的在于针对上述现有技术的不足,利用无人机、反向散射和ris技术的优势,首次通过集成mec、反向散射通信、无人机和ris技术提出了一种基于反向散射ris辅助无人机使能的mec能效最大化方法。通过寻找最优反向散射反射系数、计算资源、时间分配、ris相移和无人机轨迹,使系统能效最大,从而解决传统mec中存在的严重信道衰落和物联网设备能量有限的问题,有效提高了mec网络的系统吞吐量,同时显著降低物联网设备的通信和计算能耗。
2、实现本发明的基本思路是:在基于反向散射ris辅助无人机使能的mec场景下,物联网设备采用时分多址协议,借助ris从无人机的射频广播信号中获取能量,并通过反向散射将自身无法完成的任务输入数据借助ris进一步部分卸载给地面的mec服务器进行计算,从而节省自身的能量消耗并提高计算效率。
3、为实现上述目的,本发明的技术方案,包括如下步骤:
4、(1)搭建边缘计算网络模型:
5、由一个配备mec服务器的单天线基站、一个单天线旋翼无人机、具有m个反射阵元的ris以及k个单天线物联网设备构建边缘计算网络模型;令和分别表示物联网设备与ris反射阵元的集合,其中k和m分别表示第k个物联网设备和第m个ris反射阵元;
6、(2)划分用户和无人机的时隙结构:
7、将有限的任务完成时间t离散化为n个相等的时隙,令表示n个时隙的集合,其中n表示第n个时隙;每个时隙的持续时间为τ=t/n,假设无人机的位置在每个时隙期间不变;物联网设备采用时分多址协议,将每个时隙划分为k'个子时隙,其中k'=k,每个子时隙的持续时间由时间分配决策变量确定,且满足
8、(3)获取反向散射ris辅助无人机使能的mec网络模型的最优优化变量:
9、(3.1)采用三维欧几里德坐标系,假设基站和所有物联网设备的位置固定在零海拔的地面上,得到基站和物联网设备k的水平位置分别为wa=(xa,ya)和wk=(xk,yk);假设ris安装在建筑外立面上,得到ris的水平位置和高度分别为wr=(xr,yr)和hr;令θm[n]表示在第n个时隙ris反射阵元m的相移,得到ris在第n个时隙的对角线反射系数矩阵为假设无人机在任务完成时间t内以固定高度h飞行,且将飞行起点和终点分别设置为qi和qf;基于离散路径规划方法,得到在第n个时隙无人机的水平位置q[n],其中q[0]=qi,q[n]=qf;假设无人机与ris、ris与物联网设备、ris与基站之间均由视距链路主导,分别得到在时隙n内无人机与ris、ris与物联网设备k、物联网设备k与ris以及ris与基站之间的信道增益为hu,r[n]、hr,k、gk,r和gr,a;假设无人机与物联网设备以及物联网设备与基站之间的无线信道受阻服从瑞利衰落信道模型,分别得到时隙n内无人机与物联网设备以及物联网设备与基站之间的信道增益为hu,k[n]和gr,a,进一步得到从无人机到物联网设备k和物联网设备k到基站的等效信道增益为hk[n]和gk[n];
10、(3.2)假设每个物联网设备均有一确定的计算任务待执行,计算任务由二元组表示,其中ik表示计算输入任务比特的大小,ck表示输入1比特数据所需的计算资源;
11、(3.3)无人机通过优化飞行轨迹与物联网设备建立可靠的射频信号连接,物联网设备将其从无人机接收到的射频信号分为两部分αk[n]和1-αk[n],其中αk[n]用于反向散射到基站,1-αk[n]被收集用于支持电路消耗,得到第k个物联网设备在时间段t内收获的总能量为ehk;每个物联网设备采取部分卸载模式,将计算任务的一部分通过反向散射卸载给基站进行计算,另一部分在物联网设备本地计算,得到在时隙n内第k个物联网设备的本地计算执行的任务比特和能耗第k个物联网设备向基站卸载的任务比特和传输能耗以及无人机的飞行能耗
12、(3.4)根据下式计算物联网设备k在任务完成时间t内的总能量消耗ek和无人机在任务完成时间t内的总能量消耗eu:
13、
14、
15、其中pu为无人机的发射功率;
16、(3.5)构建最大化系统能效的表达式:
17、
18、其中,优化变量为反向散射的反射系数α={αk[n]}、物联网设备本地计算的cpu频率f={fk}、每个子时隙的持续时间ris的相移θ={θm[n]}以及无人机的轨迹q={q[n]};ωu表示无人机的能耗权重;
19、设定物联网设备和无人机满足如下约束条件:
20、表示任务完成约束;表示能量因果约束,其中表示第k个物联网设备的初始能源;0≤αk[n]≤1表示反向散射的反射系数约束;0≤fk≤fk,max表示物联网设备本地计算cpu频率约束,其中fk,max表示第k个物联网设备的最大可用cpu频率;表示每个子时隙持续时间约束;|θm[n]|2=1表示ris的相移约束;q[0]=qi,q[n]=qf表示无人机的起点和终点位置约束;||q[n]-q[n-1]||≤τvmax表示无人机最大速度约束;
21、(3.6)通过丁克尔巴赫算法、交替优化算法、majorization minimization算法、半定松弛算法和连续凸逼近算法获取最优系统能效及其对应的最优优化变量;
22、(4)根据最优系统能效对应的最优优化变量设定系统工作参数,并使系统在该参数下运行,实现系统能效优化。
23、本发明与现有技术相比具有的如下优点:
24、第一、本发明采用了无人机作为移动能量源与物联网设备建立可靠能量传输连接,从而确保系统在高负载或突发事件下的稳定运行,且后期无人机可根据系统的需要自动调整航线和充电时间,从而最大限度地提高能源利用率和系统的效率。
25、第二、由于本发明的背向散射辅助mec利用无人机的射频信号收集能量并进行任务卸载,不需要发送额外的信号,因此能够有效降低物联设备的通信能耗,同时,实现更高的数据传输速率和更远的传输距离,从而提高了通信的效率。
26、第三、本发明利用ris增加信道容量和覆盖范围,从而增强无人机与物联网设备能量传输链路,以及物联网设备与基站链路的质量和稳定性,进一步提升系统的吞吐量并降低系统的能耗。
- 还没有人留言评论。精彩留言会获得点赞!