一种随机部署水下无线传感网络的时间同步方法及系统
本发明涉及水声通信领域,特别涉及一种随机部署水下无线传感网络的时间同步方法及系统。
背景技术:
1、水下传感器网络(underwater wireless sensor network,uwsn)协同工作的前提条件是各节点拥有共同的时间基准。然而,各节点时钟的初始读数设置存在误差,时钟频率也会略有不同。受老化、压强、温度等因素的影响,时钟晶振的振动频率也随时间发生漂移。因此,时钟的不稳定性要求网络中的节点要进行定期的时间同步。时间同步技术通过读取节点时钟读数,并将其传播给其他节点,实现节点之间的时间信息交换,进而估计、校准各节点的时钟参数,使得各节点的时钟读数尽可能保持一致。对于uwsn,时钟读数信息的传递延迟高、即时性差,节点不能直接根据收到的时钟读数来校准自身时钟,因此时间同步技术难度高。此外,水下施工、维护难度大,节点在水下难以更换电池或充电,导致其能源受限。
2、经典的时间同步方案共有三种:接收端-接收端同步(receiver-receiversynchronization,rrs)、发送端-接收端同步(sender-receiver synchronization,srs)和仅接收端同步(receiver-only synchronization,ros)。大多数现有的时间同步方法都是在这三种时间同步方案的基础上,进一步设计时钟校正算法。
3、在rrs方案中,存在一个公共的广播源广播若干轮信号,然后网络中的节点彼此交换收到广播信号时自己的时钟读数。然而,广播信息在传递过程中不可避免会引入时延,这会对rbs协议的同步精度带来负面影响。由于水下信息传播的时延尤为明显,因此rbs协议不适用于uwsn。
4、srs方案是通过让网络中的一对节点进行多轮的双向时间信息交换,然后节点各自估计时钟参数来实现同步的。srs方案需要进行大量的双向时间信息交换来实现全网的时间同步,这会消耗大量的能量,这限制了其在uwsn中的应用。
5、ros方案则通过利用广播的信息传递方式达到减少信息发送次数的目的,是一种节能的时间同步方案。在ros方案中,一对主动节点(可以发送与接收信息的节点)以广播的方式进行双向时间信息交换实现两者的时间同步,同时网络中大量的静默节点(仅接收信息的节点)侦听主动节点广播的时间信息,进而估计自己的时钟参数。由于ros方案假设节点之间的距离相等,因此ros方案仅适用于蜂窝状的uwsn。
6、在经典时间同步方案中,rrs方案同步精度低,srs方案能耗高,二者均不适用于uwsn;ros方案时间同步精度高,但其假设节点之间的距离相等,因此仅适用于蜂窝状的uwsn。对于节点随机部署的uwsn,研究者们提出了一种三节点轮流广播的时间同步方案,该方案将随机部署的uwsn中节点分簇,每簇含有三个节点,各簇之间依次同步进而实现全网时间同步。这种同步方式在uwsn规模较大时,完成全网同步时间较长,且信息发送次数较多,能量消耗较大。因此,针对节点随机部署的uwsn,有必要研究新的时间同步方案及适配的时钟参数估计算法,实现对任意拓扑结构uwsn的低能耗、高精度的时间同步。
技术实现思路
1、本发明针对水下随机部署无线传感网络对于低能耗、高精度时间同步技术的需求,设计了一种交替广播时间同步方案(alternating broadcast synchronization,abs),针对这一方案构建了可以适配待同步节点非等间距部署网络的多节点或多节点直接时间信息交换模型,在该模型基础上提出了时钟参数的最优线性无偏估计算法。
2、为达到上述目的,本发明通过下述技术方案实现。
3、本发明提出了一种随机部署水下无线传感网络的时间同步方法,所述方法包括:
4、设计交替广播时间同步abs方法,并采用该方法通过随机部署水下无线传感网络的各节点轮流以广播的方式向其他节点发送时钟读数信息;
5、针对交替广播时间同步abs方法,建立其时间信息交换的数学模型;该数学模型将各节点信息传播时延建模为传播时延与随机时延的叠加,其中传播时延是非随机的未知参数且各节点之间的传播时延不同,随机时延为服从指数分布的随机变量;
6、根据数学模型进行时钟参数的最优线性无偏估计,实现各节点每一轮广播时间同步。
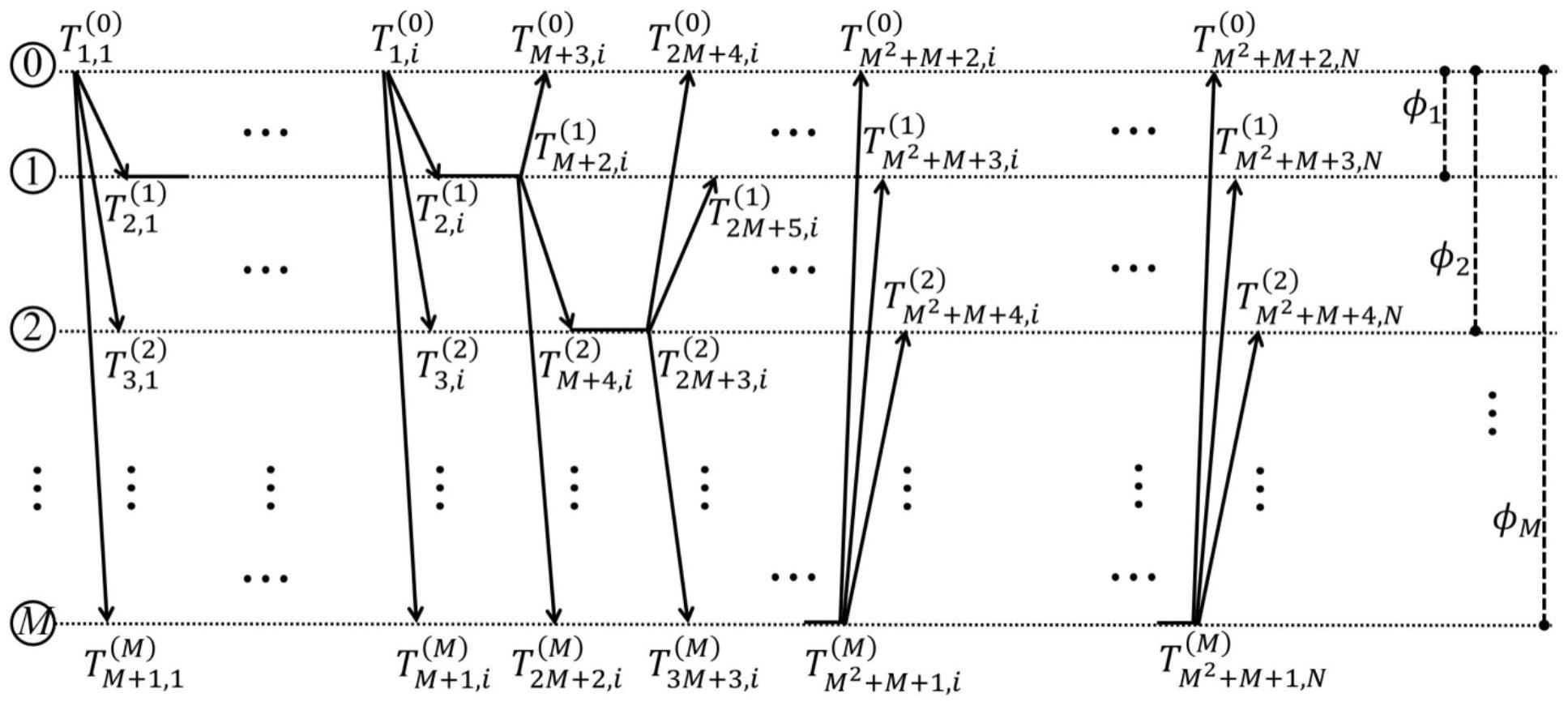
7、作为上述技术方案的改进之一,所述交替广播时间同步abs方法,包括:
8、节点0~m轮流广播n次时钟读数信息,其中节点0为拥有标准时钟的参考节点,节点1至m为待同步节点,第i轮广播过程具体包括:
9、步骤1)节点0广播当下的标准时钟读数以及在第i-1轮产生的未广播的时钟读数
10、步骤2)节点1至m收到节点0的广播之后,分别记录下此时本地时钟的时钟读数,对于节点m∈{1,2,…,m},,其时钟读数记为
11、步骤3)节点1至m按照时间顺序依次广播时间信息,对于节点m∈{1,2,…,m},,所广播的时间信息包含此时本地时钟的时钟读数之前记录的第i轮产生的未广播的时钟读数和以及第i-1轮产生的未广播的时钟读数和
12、步骤4)节点0和节点1至m中的非广播节点在接收到节点m的广播时,分别基于各自本地时钟记录下此时的时钟读数,各节点读数依次记为
13、步骤5)重复步骤3)-步骤4)至m个节点均完成广播,实现时间同步过程,并进入下一轮广播。
14、作为上述技术方案的改进之一,所述步骤2)中,第i轮广播中节点m接收到节点0的广播信息时,本地时钟读数与广播信息中包含时钟读数之差计算式为:
15、
16、其中i从1到n遍历;φm为节点m的时钟偏差;d(0,m)、d(0,2)和d(1,2)表示第m个节点与参考节点之间的传播时延;为独立同分布于指数分布的随机时延,其均值λ是未知的。
17、作为上述技术方案的改进之一,所述步骤3)和步骤4)中,第i轮广播中节点l接收到节点j的广播信息时,本地时钟读数与广播信息中包含的时钟读数之差计算式为:
18、
19、其中φ0表示参考节点的时钟偏差,即两个节点间的传播时延认为与信息传播方向无关,即d(j,l)=d(l,j)。
20、作为上述技术方案的改进之一,所述交替广播时间同步abs方法中,网络中各节点要求满足条件:每个节点均在其他节点的广播范围内;
21、对于不满足该条件的网络,先通过分簇的方式推广至全网时间同步,使得簇内的节点保证相互的广播覆盖,然后各簇按照簇内的节点数目实施交替广播时间同步abs方法实现全网时间同步。
22、作为上述技术方案的改进之一,所述根据数学模型进行时钟参数的最优线性无偏估计,具体包括:
23、步骤1.梳理数学模型中的未知参数,形成未知参数向量,具体包括:
24、对于m个待同步节点的情况,未知参数φ为和λ构成的维向量,即:
25、
26、步骤2.将时钟读数之差表示为顺序统计量的形式:
27、
28、n轮广播中,节点l接收到节点j的广播信息时的本地时钟读数与节点j所广播时钟读数之差为如下向量形式:
29、
30、则n轮广播中产生的所有时钟读数差数据为如下向量形式:
31、
32、式中,表示由m(m+1)个不同的二元有序数对(i,j)m作为分量的有序组,其表达式为:
33、
34、即对中任意两个不同的二元有序数对(x,y)m和(k,l)m,若x<k,或者x=k且y<l,则(x,y)m对应的分量序号小于(k,l)m对应的分量序号;表示的第n个分量;
35、步骤3.计算第i轮广播时钟读数差向量的期望e[s]:
36、
37、其中,q由m(m+1)个子矩阵构成;其中,表示由个不同的二元有序数对作为分量的有序组,其表达式为:
38、
39、即对中任意两个不同的二元有序数对(x,y)m和(k,l)m(注意,此处有x<y且k<l),若x<k,或者x=k且y<l,则(x,y)m对应的分量序号小于(k,l)m对应的分量序号,表示的第n个分量;
40、步骤4.构造φ的最小方差无偏估计(blue-os)表达式
41、
42、其中,
43、
44、
45、其中,cs为由m(m+1)个顺序统计量的协方差矩阵c作为对角块构成的块对角矩阵。
46、步骤5.分别求解ξ-1和ω,计算得到表达式:
47、
48、其中,
49、
50、作为上述技术方案的改进之一,所述步骤5具体包括:
51、步骤5-1.计算blue-os表达式中的ω矩阵;
52、首先考虑维矩阵的元素构成,经计算,其大部分元素为0,仅有位于(l+1,1)和的元素值为n2,位于(j+1,1)的元素值为-n2,位于的元素值为1,则ω写为:
53、
54、其中,
55、
56、
57、步骤5-2.计算blue-os表达式中的ξ矩阵;
58、考虑维矩阵的元素构成;经计算,其大部分元素为0,非零元素值包括:n2、-n2、n和-n;
59、其中,
60、n2的位置包括:(j+1,j+1)、(l+1,l+1)、
61、-n2的位置包括:(j+1,l+1)、(l+1,j+1)、
62、n的位置包括:
63、-n的位置包括:
64、进而计算的元素构成;经计算,其非零元素值包括2n2、-2n2和2n,其中,
65、2n2的位置包括:(j+1,j+1)、(l+1,l+1)和
66、-2n2的位置包括:(j+1,l+1)和(l+1,j+1);
67、2n的位置包括:和
68、由上可知:ξ是一个块对角矩阵,可由两个维度分别为m×m和的矩阵构成,即ξ可表达为:
69、
70、其中
71、
72、
73、步骤5-3.计算blue-os表达式中的ξ-1矩阵;ξ是一个块对角矩阵,其逆矩阵可以表达为:
74、
75、分别计算和计算得到ξ-1;
76、步骤5-4.得到blue-os最终表达式:
77、
78、其中,
79、
80、作为上述技术方案的改进之一,所述步骤5-3中,通过初等变换法分别计算和具体包括:
81、对于矩阵ξa,考察[ξa/(2n2)|im],即:
82、
83、对上述分块矩阵依次执行下述操作:将第2至m行的和加到第1行,将第1行分别加到第2至m行,第2至m行分别除以m+1,将第2至m行的和再乘-1,最后加到第1行,最终变为:
84、
85、因此,可表示为:
86、
87、对于矩阵ξb,考察即:
88、
89、令对上述分块矩阵依次执行下述操作:第1至行的和再除以-n,然后加到第行;第行除以第行乘-1,然后分别加到第1至行;第1至行分别除以n,最终变为:
90、
91、因此,表达为:
92、
93、本发明还提出了一种随机部署水下无线传感网络的时间同步系统,所述系统包括:
94、同步广播控制模块,用于设计交替广播时间同步abs方法,并采用该方法通过随机部署水下无线传感网络的各节点轮流以广播的方式向其他节点发送时钟读数信息;
95、模型构建模块,用于针对交替广播时间同步abs方法,建立其时间信息交换的数学模型;该数学模型将各节点信息传播时延建模为传播时延与随机时延的叠加,其中传播时延是非随机的未知参数且各节点之间的传播时延不同,随机时延为服从指数分布的随机变量;和
96、参数估计模块,用于根据数学模型进行时钟参数的最优线性无偏估计,实现各节点每一轮广播时间同步。
97、本发明与现有技术相比优点在于:
98、1、对于节点随机部署的uwsn,从节省能量和提高精度的角度考虑,提出了一种低能耗、高精度的时间同步方案——交替广播时间同步方案,并设计了对应的时钟参数估计算法;
99、2、广播范围内各节点交替轮流广播的信息传递流程;在abs方案中,各节点轮流地以广播的方式向其他节点发送时钟读数信息,并估计时钟偏差实现时间同步,这种广播的方式既可以减少信息发送次数进而节省能源,多个节点的时钟信息交换也提升了时钟参数估计精度;对于不能同时被其他所有节点广播覆盖的节点,abs方案也可以通过分簇的方式推广至全网时间同步;
100、3、可适配待同步节点非等间距部署的多节点直接时间信息交换模型;针对abs方案建立了多节点直接时间信息交换模型,该模型信息传播时延建模为传播时延与随机时延的叠加,其中传播时延是非随机的未知参数且各节点之间的传播时延认为是不相同的,随机时延为服从指数分布的随机变量;
101、4、针对上述模型的高精度最优线性无偏时钟参数估计方法;在上述模型的基础上,提出了时钟参数的最优线性无偏估计算法,相比经典的srs方案和ros方案具有更高的时间同步精度。
- 还没有人留言评论。精彩留言会获得点赞!