监测船舶稳定性的方法及装置与流程
本发明涉及智能监测,尤其涉及一种监测船舶稳定性的方法及装置。
背景技术:
1、在港口停泊的大型船舶,通常会发生如下的潜在危险:由于受到潮汐和台风等因素的影响,会使船舶的位置发生漂移,对缆绳产生破坏性拉力,进而导致缆绳断裂;在对船舶进行货物装卸时,当载荷不平衡时,可能会发生船体侧倾甚至倾覆的危险;在对船舶进行货物装卸时,若载荷不平衡,可能会损坏正在装卸的货物,严重时还可能会危及作业人员的生命健康安全。监测船体或船舶的稳定性成为当务之急。
2、现有技术中,一般通过船体倾角监控的设备来监测船体或船舶的稳定性。对于船体倾角监控的设备,通常是在船舶驾驶室内配备吊锤式的船体倾斜仪,根据船体倾斜仪来实时反映船体或船舶的稳定性。
3、然而上述方法中,倾斜仪的精度还会受到安装位置及安装方式的影响,精度差,不能连续记录整个装卸过程船体倾角的变化过程,且发生危险倾角时无法自动报警。因此,亟需一种有效的方案以解决上述问题。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供一种监测船舶稳定性的方法及装置。
2、本发明提供一种监测船舶稳定性的方法,包括:
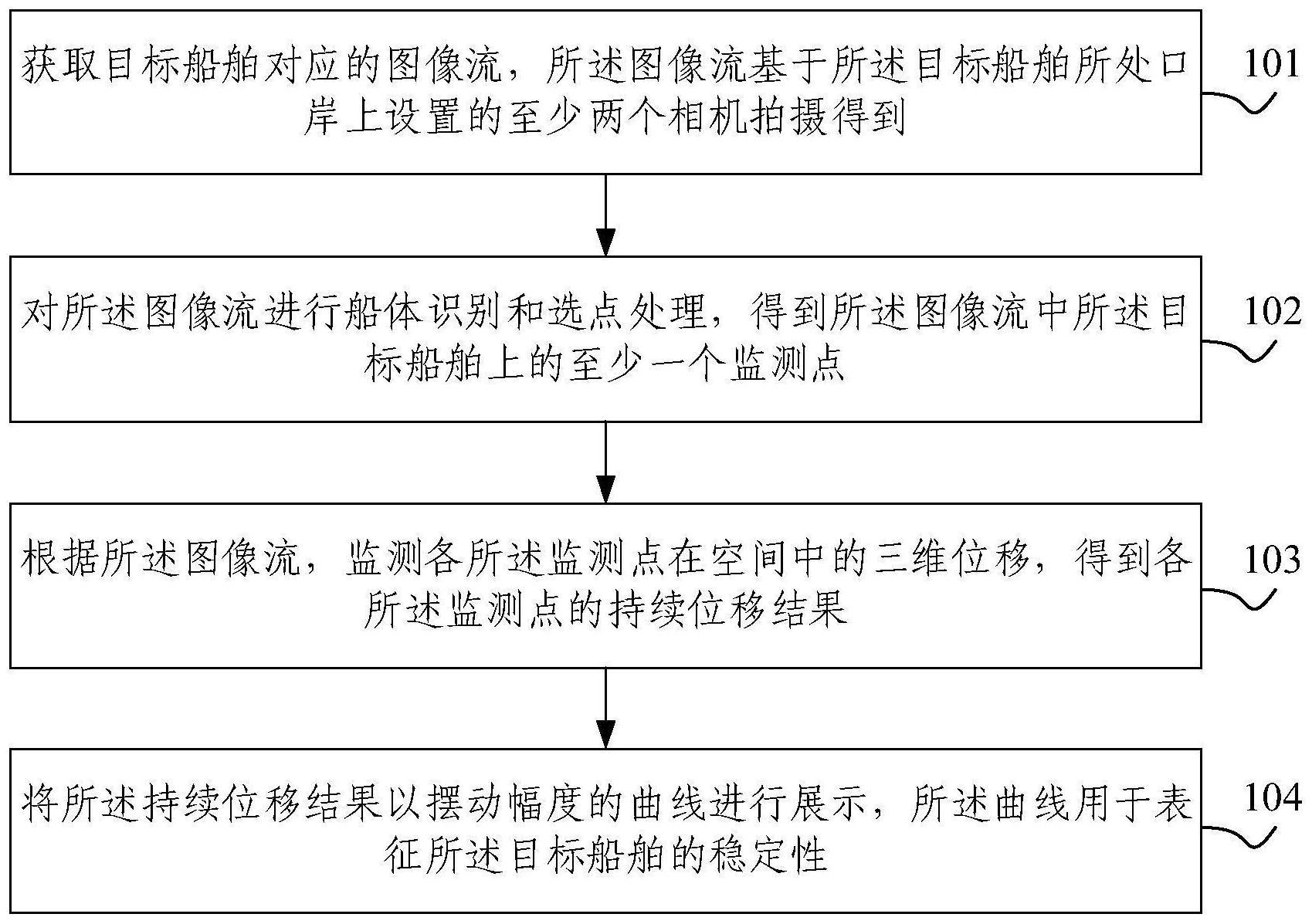
3、获取目标船舶对应的图像流,所述图像流基于所述目标船舶所处口岸上设置的至少两个相机拍摄得到;
4、对所述图像流进行船体识别和选点处理,得到所述图像流中所述目标船舶上的至少一个监测点;
5、根据所述图像流,监测各所述监测点在空间中的三维位移,得到各所述监测点的持续位移结果;
6、将所述持续位移结果以摆动幅度的曲线进行展示,所述曲线用于表征所述目标船舶的稳定性。
7、根据本发明提供的一种监测船舶稳定性的方法,所述对所述图像流进行船体识别和选点处理,得到所述图像流中所述目标船舶上的至少一个监测点,包括:
8、对所述图像流进行船体识别,确定所述图像流中所述目标船舶的船体区域;
9、根据所述船体区域,确定所述图像流中的感兴趣区域;
10、对所述感兴趣区域进行选点处理,得到所述图像流中所述目标船舶上的至少一个监测点。
11、根据本发明提供的一种监测船舶稳定性的方法,所述对所述感兴趣区域进行选点处理,得到所述图像流中所述目标船舶上的至少一个监测点,包括:
12、将所述感兴趣区域划分为多个子区域,并确定各所述子区域的纹理特征信息;
13、根据各所述子区域的纹理特征信息,从各所述子区域中选取至少一个子区域作为所述监测点。
14、根据本发明提供的一种监测船舶稳定性的方法,所述根据各所述子区域的纹理特征信息,从各所述子区域中选取至少一个子区域作为所述监测点,包括:
15、确定各所述子区域的纹理特征信息对应的梯度信息,并选取所述梯度信息最大的预设数值个子区域作为备选点;
16、利用数字图像匹配和追踪技术对各所述备选点进行预分析,得到各所述备选点的分析难度,并根据所述分析难度对各所述备选点进行筛选,得到至少一个监测点。
17、根据本发明提供的一种监测船舶稳定性的方法,所述获取目标船舶对应的图像流之前,还包括:
18、确定架设在所述口岸或所述目标船舶上的标定物,所述标定物所处的标定物坐标系的方向与基准坐标系的方向之间的相似度大于设定值;
19、在所述标定物上设置至少三个采样点,并获取各所述采样点之间的距离或各所述采样点与所述相机之间的距离;
20、根据所述距离,对所述相机进行参数标定,得到标定结果。
21、根据本发明提供的一种监测船舶稳定性的方法,所述图像流包括至少两个子图像流,所述子图像流与所述相机一一对应;
22、相应地,对所述图像流进行船体识别和选点处理,得到所述图像流中所述目标船舶上的至少一个监测点,包括:
23、获取各所述相机采集的所述目标船舶的初始状态图;
24、对指定初始状态图进行船体识别和选点处理,得到所述初始状态图中所述目标船舶上的至少一个监测点和各所述监测点的第一图像位置,所述指定初始状态图为任一初始状态图;
25、将所述指定初始状态图与各其他初始状态图进行图像匹配,确定各所述其他初始状态图中各所述监测点的第一图像位置,所述其他初始状态图为除所述指定初始状态图以外的任一初始状态图;
26、相应地,所述根据所述图像流,监测各所述监测点在空间中的三维位移,得到各所述监测点的持续位移结果,包括:
27、根据各所述初始状态图中第一监测点的第一图像位置,确定所述第一监测点的第一空间位置和所述第一监测点在各所述子图像流中的第二图像位置,所述第一监测点为任一监测点;
28、根据指定时刻所述第一监测点在各所述子图像流中的第二图像位置,确定所述第一监测点在所述指定时刻的第二空间位置,所述指定时刻为任一时刻;
29、根据所述第一空间位置和所述第二空间位置,确定所述指定时刻所述第一监测点在空间中的三维位移;
30、将各时刻所述第一监测点在空间中的三维位移进行联合处理,得到所述第一监测点的持续位移结果。
31、根据本发明提供的一种监测船舶稳定性的方法,所述根据指定时刻所述第一监测点在各所述子图像流中的第二图像位置,确定所述第一监测点在所述指定时刻的第二空间位置,包括:
32、将所述指定初始状态图与所述第一子图像流进行图像匹配,确定所述第一子图像流中各所述监测点的位置;
33、根据各所述相机的标定结果和指定时刻所述第一监测点在各所述子图像流中的第二图像位置,确定所述第一监测点在所述指定时刻的第二空间位置。
34、本发明还提供一种监测船舶稳定性的装置,包括:
35、获取模块,被配置为获取目标船舶对应的图像流,所述图像流基于所述目标船舶所处口岸上设置的至少两个相机拍摄得到;
36、处理模块,被配置为对所述图像流进行船体识别和选点处理,得到所述图像流中所述目标船舶上的至少一个监测点;
37、监测模块,被配置为根据所述图像流,监测各所述监测点在空间中的三维位移,得到各所述监测点的持续位移结果;
38、展示模块,被配置为将所述持续位移结果以摆动幅度的曲线进行展示,所述曲线用于表征所述目标船舶的稳定性。
39、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述监测船舶稳定性的方法。
40、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述监测船舶稳定性的方法。
41、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述监测船舶稳定性的方法。
42、本发明提供的监测船舶稳定性的方法及装置,通过获取目标船舶对应的图像流,所述图像流基于所述目标船舶所处口岸上设置的至少两个相机拍摄得到;对所述图像流进行船体识别和选点处理,得到所述图像流中所述目标船舶上的至少一个监测点;根据所述图像流,监测各所述监测点在空间中的三维位移,得到各所述监测点的持续位移结果;将所述持续位移结果以摆动幅度的曲线进行展示,所述曲线用于表征所述目标船舶的稳定性。可以实时显示目标船舶的船体监测结果,即稳定性,能够连续记录船舶在装卸过程中船体倾角的变化过程,并在船体摆动幅度过大的时候发出预警。此外,由于相机设置在口岸上不受船体的船体影响,能够提高稳定性监测的精确度。
- 还没有人留言评论。精彩留言会获得点赞!