一种感知通信一体化无人机辅助移动车辆的方法
本发明涉及无人机辅助感知和通信领域,具体涉及一种感知通信一体化无人机辅助移动车辆的方法。
背景技术:
1、感知通信一体化技术(integrated sensing and communications,isac)作为未来智能车辆网络实现的关键要素,受到了广泛的认可与重视。其核心目标在于同时实现高度精确的感知功能和可靠的通信功能,以确保车辆在行驶过程中的安全与效率。通过共享相同的频谱和基础设施,isac技术具备降低硬件和信号成本、提高频谱利用效率的潜力。isac技术的应用对于构建智能交通系统、推进自动驾驶技术、以及实现车辆间和车辆与基础设施之间的高效信息交互,都具有重要意义。
2、在紧急或意外情况下,由于地面基础设施的高昂运营成本和复杂不稳定的环境,部署固定地面基础设施在经济上是不可行且具有挑战性的。相比之下,无人机(unmannedaerial vehicle,uav)能够根据实时需求灵活调整飞行轨迹,并进行动态部署,更好地适应通信环境的变化。因此,无人机被视为未来移动网络的重要组成部分。这些特性使得无人机在各个领域(如灾后救援、通信辅助、资源勘测等)中被广泛采用。
3、在车辆通信背景下,无人机作为空中辅助平台,通过isac技术为车辆提供通信和感知服务,呈现出独特的优势。通过无人机辅助的isac系统,不仅增强了通信性能,同时还扩展了移动车辆的检测范围,从而进一步提升了车辆行驶的安全性与效率。与传统的isac架构不同,基于isac的无人机通信赋予了新的含义,因为传感和通信功能紧密耦合。通过将isac技术与无人机的优势相结合,车辆可以获得更加强大的通信能力和全面的感知能力,从而增强车辆之间以及车辆与基础设施之间的连接,有助于实现车辆之间的协同行驶、交通信息的及时传递和道路安全的提升。
4、然而,当前例如“s.hu,x.yuan,w.ni,and x.wang,“trajectory planning ofcellular-connected uav for communication-assisted radar sensing,”ieeetransactions on communications,vol.70,no.9,pp.6385–6396,2022”的研究大多数仅考虑地面用户位置固定的场景,这并不能完全适用于移动车辆的isac应用。移动车辆的isac面临着更加复杂的挑战,例如车辆的高速移动、通信环境的快速变化以及无人机与车辆之间的协调问题。因此,在进一步发展isac技术的过程中,必须针对移动车辆的特殊需求进行深入研究,以确保isac系统在实际应用中能够稳定可靠地为车辆提供通信和感知支持。
技术实现思路
1、针对感知通信一体化无人机辅助车辆系统中地面用户位置固定的问题,本发明提出一种感知通信一体化无人机辅助移动车辆的方法,将无人机作为空中的双功能平台,通过联合优化无人机的isac任务调度、发射功率以及飞行轨迹来有效提高无人机的总通信速率。
2、本发明的技术方案如下:
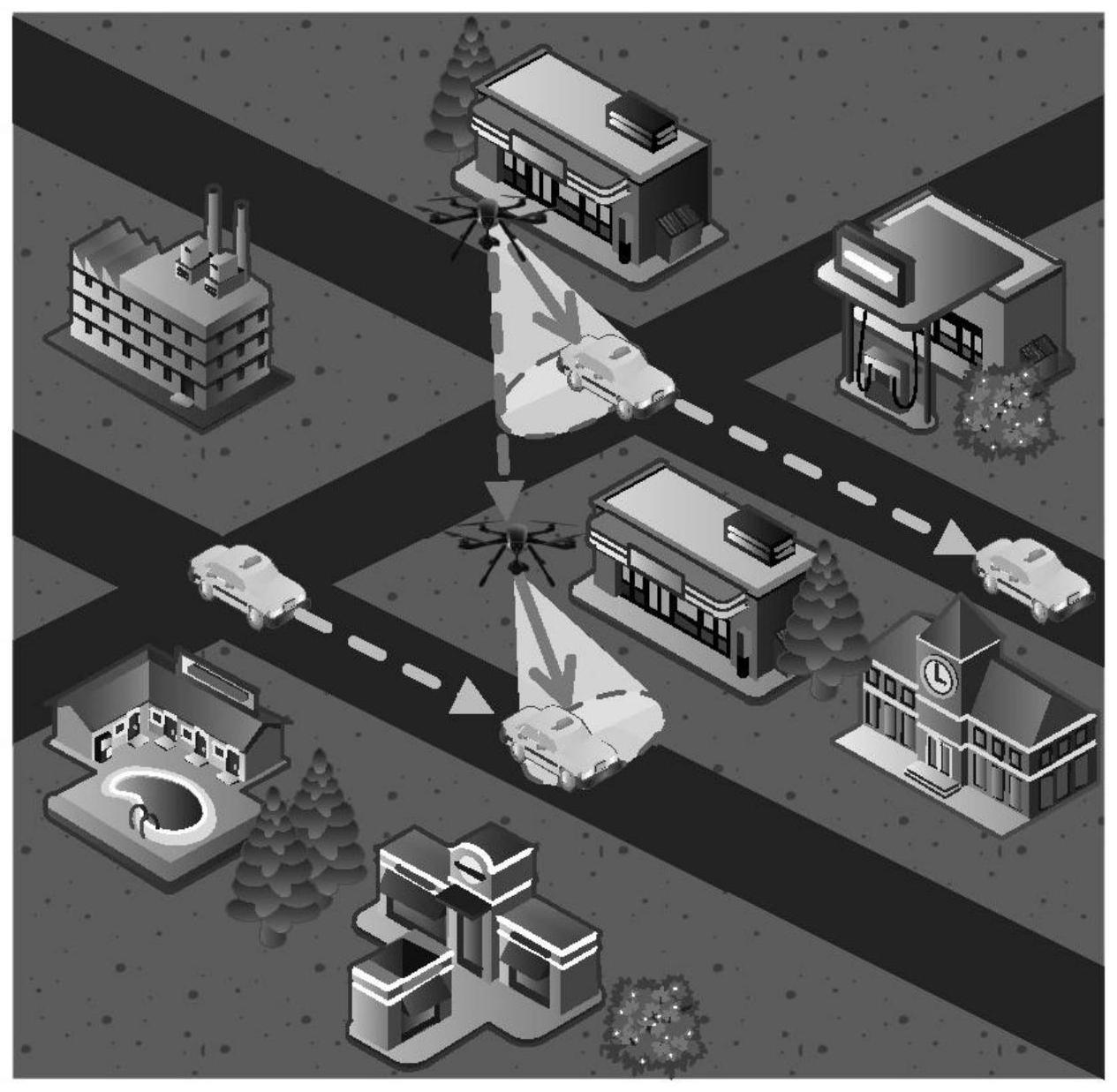
3、一种感知通信一体化无人机辅助移动车辆的方法,其中的感知通信一体化无人机辅助移动车辆的系统包括无人机和移动车辆;无人机具备感知和通信双重功能,同时发射雷达探测信号和通信信号;无人机作为双功能的空中平台,以固定的高度h飞行执行感知通信一体化任务,保证与移动车辆的视距连接;无人机的总飞行时间t被分解为n个足够小的时隙,以保证在每个时隙无人机和车辆的位置保持不变;无人机对地面移动车辆进行实时跟踪,当无人机对探测到的车辆雷达信干噪比达到最小门槛时,视为有效探测,若未达到将对其他车辆进行感知和通信;
4、通过引入雷达互信息作为性能指标,联合优化无人机的isac任务调度、发射功率以及飞行轨迹来有效提高无人机的总通信速率;具体包括以下步骤:
5、步骤一:构建感知通信一体化无人机辅助移动车辆的系统,包括网络信道模型、性能评价模型和无人机运动学模型;
6、步骤二:设计优化问题,最大化无人机的通信速率,满足无人机的isac任务调度约束、探测门限约束、发射功率约束和飞行轨迹约束;
7、步骤三:将优化问题分解为三个非凸的子问题,利用连续凸近似方法,将非凸的子问题转换为凸问题,设计交替优化算法,并利用matlab中的cvx工具箱求解。
8、所述步骤一中网络信道模型具体为:无人机到移动车辆k的通信信道功率增益表示为hk,c(n),其中k=1,2,…k,k代表了车辆总数;n=1,2,…n;无人机到移动车辆k之间的信道为视距信道,采用自由空间衰落模型进行模拟无人机到移动车辆之间的信道,即
9、
10、其中,gt和gc分别表示无人机发射机和通信接收机的天线增益,dk(n)表示无人机到移动车辆k的距离,λ=c/fc表示信号波长,c和fc分别表示光速和信号的载波频率;
11、
12、无人机到移动车辆k的雷达信道功率增益表示为
13、
14、其中,gr表示无人机雷达接收机的天线增益,σ表示目标车辆的雷达散射截面积;
15、
16、所述步骤一中的性能评价模型具体为:
17、考虑到感知通信一体化无人机辅助移动车辆的系统中感知和通信的相互干扰,无人机对移动车辆k执行感知通信一体化任务时,其通信信道的信干噪比γk,c(n)和雷达信道的信干噪比γk,r(n)表示为
18、
19、
20、其中,b表示信号带宽,n0表示噪声功率谱密度,pc和pr分别表示无人机通信功率和雷达探测功率;
21、根据香农公式,在第n个时隙,无人机到移动车辆k的通信信息速率rk,c(n)表示为
22、
23、在第n个时隙,无人机对于移动车辆k的雷达信息量表示为
24、
25、无人机在第个n时隙内的总通信速率表示为
26、
27、为确保无人机能有效执行相应任务,无人机在每个时隙内向车辆传输的信息量大于雷达探测到的信息量;无人机数据传输约束表示为
28、
29、为确保无人机能达到理想的雷达探测性能,每个时隙的雷达信干噪比应达到最小门限值;雷达信干噪比约束表示为
30、
31、其中,ωk(n)是一个二进制离散变量,用于表示感知通信一体化任务的调度,ωk(n)等于0时,代表无人机没有执行感知通信一体化任务,ωk(n)等于1时,表示无人机此时正在对车辆k进行感知通信一体化任务,为了避免其他车辆的干扰,无人机在同一时隙内只能为一辆移动车辆服务,即
32、所述无人机在飞行过程中满足的运动学模型为:
33、
34、其中,qu(n)=(xu(n),yu(n),h)表示无人机在第n个时隙的位置坐标;vm表示无人机飞行的最大速度,δt表示每个时隙的时间长短;
35、无人机能量消耗包括无人机通信功率的消耗和无人机雷达探测功率;在第n个时隙,无人机用于通信的功率pc(n)和无人机用于雷达探测的功率pr(n)表示为
36、
37、
38、其中,0≤μ(n)≤1表示每个时隙中的功率分配因子,ps(n)为无人机在时隙n的发射功率。
39、为了最大化无人机的通信速率,所述步骤二的优化问题为
40、
41、
42、
43、
44、
45、
46、
47、
48、
49、其中,pa代表无人机的平均发射功率,vm代表无人机的最大飞行速度;(13b)~(13c)表明任务调度约束,每个时隙内,无人机只能为一辆车提供感知通信一体化服务;(13d)对无人机的雷达探测和信息传输的信息量做出限制,保证所有探测信息都能进行传输;(13c)对最小雷达信干噪比做出了限制,保证了雷达的探测性能;(13f)~(13h)对无人机每个时隙的发射功率进行了限制,保证无人机探测和通信的功率的合理分配;(13i)对无人机飞行参数进行了约束,保证了无人机的正常飞行。
50、进一步地,由于步骤二中含有整数向量和非凸约束,因此,在步骤三中,将原问题分解为了三个子问题,并设计了交替迭代的优化算法,使用cvx工具箱循环优化无人机的isac任务调度、无人机的发射功率以及无人机的飞行轨迹,直到目标函数值收敛,得到优化问题的最优解。
51、本发明的有益效果:本发明提出一种感知通信一体化无人机辅助移动的方法,通过联合优化无人机的isac任务调度、发射功率以及飞行轨迹。该方法能够在有效执行isac任务的情况下,最大化无人机的通信速率。相较于感知通信一体化功能的无人机辅助固定节点的方法,本发明在实际应用中探索了感知通信一体化无人机在车辆网络中的应用,为地面移动车辆提供了全面的感知和通信服务,拓展了无人机的应用场景,具有很强的实际应用价值。
- 还没有人留言评论。精彩留言会获得点赞!