一种面向用户体验的无人机边缘网络任务卸载方法
本发明涉及无人机,特别是一种面向用户体验的无人机边缘网络任务卸载方法。
背景技术:
1、随着物联网和5g技术的发展,终端设备的数量和需求呈现快速增长趋势。这使得终端产生了庞大的数据和流量,云计算模型在这种场景下会面临巨大的网络传输压力。使用固定基站的边缘计算网络虽然可以大幅减少网络传输压力,但依然存在部署不灵活、区域热点等问题。因此,无人机边缘网络正广泛应用于诸如灾区应急网络搭建、山林野外等复杂地形探索等复杂应用场景。
2、大规模移动终端的存在,同样会给网络带宽和计算资源的分配带来巨大挑战。如果分配问题直接针对设备建模,需要处理更加复杂的耦合关系并作出更多的决策,从而使得问题处理时间出现线性甚至指数级增长。
3、无人机边缘网络通常会涉及无人机的轨迹规划问题。由于无人机的覆盖范围有限,用户设备可能需要等待任务卸载服务可用,也就是无人机到达有效服务范围。这是一个时序依赖变量,也就是说设备通过无人机边缘网络执行任务的总时间,与无人机的服务顺序往往强关联。这会导致优化问题的形式更加复杂,从而增加问题求解的难度。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种面向用户体验的无人机边缘网络任务卸载方法,同时实现较低的时间复杂度与良好的收敛性。我们的目标是在二元任务卸载的背景下,通过求解用户设备的任务卸载决策,无人机的带宽和计算资源分配方式,无人机的轨迹来最小化无人机边缘计算网络中所有用户的收缩率之和。其中用户设备的收缩率定义为通过无人机边缘网络执行其任务所用的总时间,与本地计算其任务的总时间之比。所谓二元卸载,就是指用户设备的任务是不可分割的,只能作为一个整体在本地或者边缘服务器执行。为了降低问题规模同时利用无人机的区域覆盖特性,首先使用分区策略将区域内所有用户设备划分为多个圆形分区,分区的大小与无人机的覆盖范围相同。然后将无人机边缘计算网络中二元卸载的总收缩率最小化问题,建模为一个基于分区收缩率的混合整数非线性规划问题。问题规模从用户降低到分区,这使得我们可以使用复杂度较高且收敛效果更好的优化算法,同时保持所增加的时间复杂度在可接受范围内。
2、为解决上述问题,本发明采用如下的技术方案。
3、一种面向用户体验的无人机边缘网络任务卸载方法,包括以下步骤:
4、获取当前用户设备的位置,将所有用户设备的位置信息,输入分区算法中,通过固定半径圆覆盖方法获取到针对当前系统中所有用户设备划分分区的策略,包含分区的中心点和每个分区所包含的用户设备;
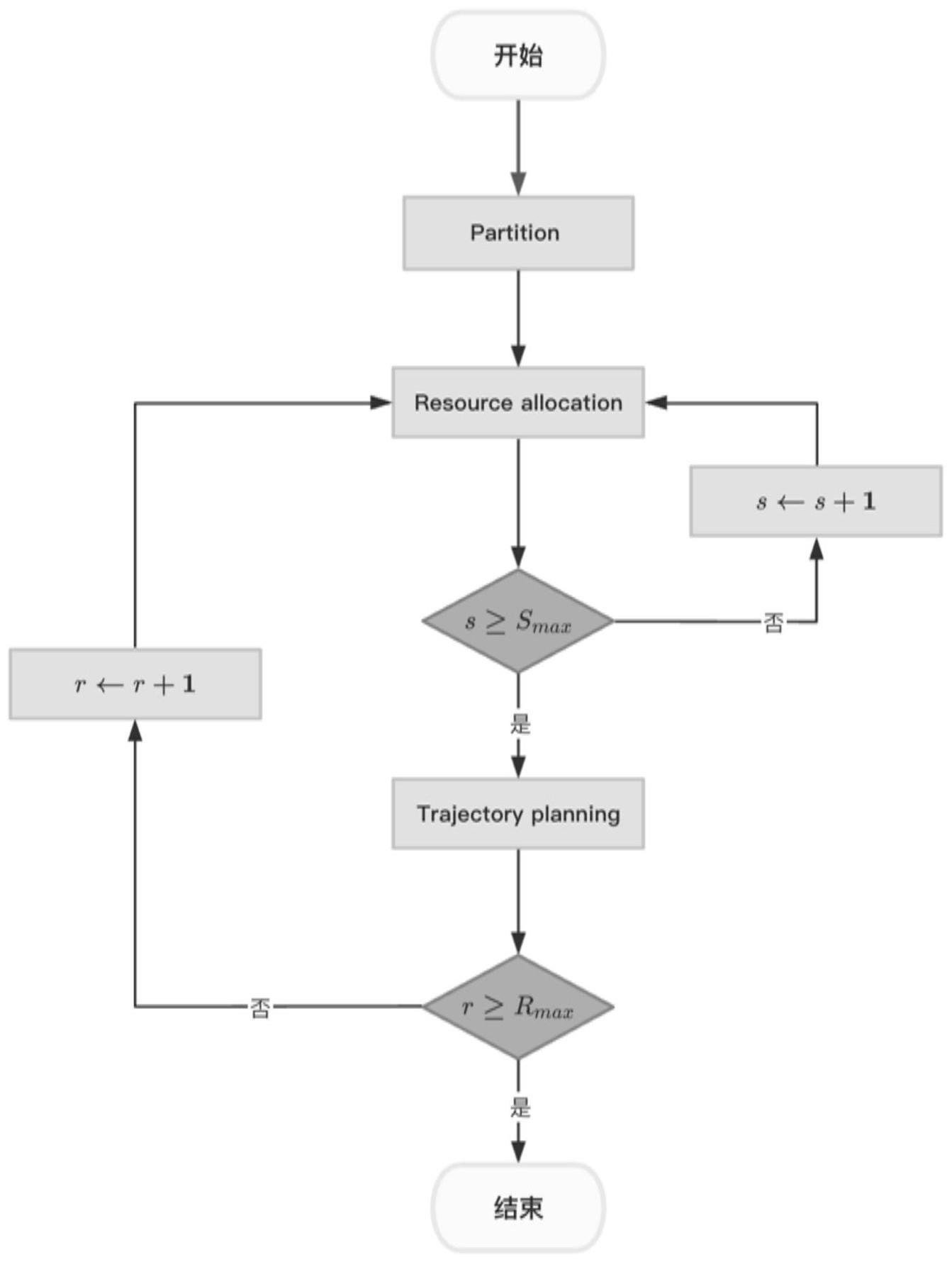
5、在得到分区策略后,将无人机边缘计算网络中二元卸载的总收缩率最小化问题基于悬停-飞行-悬停模式建模为混合整数非线性规划问题,并使用块坐标下降法分别对资源分配决策和轨迹规划决策进行交替迭代优化,共迭代次,其中资源分配决策包含任务卸载决策,无人机的带宽和计算资源分配方式。轨迹规划决策指无人机的轨迹;
6、在给定无人机轨迹后,通过调整资源分配决策最小化收缩率之和是一个难以求解的混合整数非线性规划问题,通过应用了逐次凸逼近技术的资源分配算法解决这一问题,逐次凸逼近需要迭代逼近原始最优解,共迭代rmax次;
7、在给定资源分配决策后,通过轨迹规划算法求解最优轨迹以最小化收缩率之和,可建模为miller-tucker-zemlin模型并通过求解小规模的tsp问题获取最优轨迹。
8、所述分区算法包括找到一个具有最小半径的圆,将区域内的所有点全部包含在圆上或圆内,将迭代调用该算法,以实现固定半径圆覆盖问题的求解,即不断地对区域边界进行缩小,使得最靠近边界的点刚好位于缩小后的边界之上,每次区域缩小后,顺序处理位于边界上的每一个点,而将区域内的点按照与当前边界点的顺序进行排序,不断地向集合中加入距离最近的点,调用welzl方法尝试能否构造出半径不超过r的圆,其中r为无人机的覆盖范围,当无法构造出这样的圆时,所得到的点集就是一个分区。此时继续处理下一个边界点,当所有边界点都被处理完时,继续缩小区域并重复上述过程,直到所有的点都被加入到某个分区的点集中,即可得到完整的分区结果,包含g个分区的中心点和每个分区所包含的用户设备。
9、在给定无人机轨迹ω={ω1,ω2,...,ωg}后,资源分配问题可以公式化为以下混合整数非线性规划问题:
10、
11、资源分配算法涉及卸载决策a,无人机的带宽b及cpu频率f,其中卸载决策为二进制变量,带宽和cpu频率为受约束的连续变量,在给定无人机轨迹后,通过引入松弛变量替代整数变量,从而消除优化目标中的整数约束:
12、
13、其次,对等待时间进行放缩,通过放缩消除乘积中的卸载决策,得到等待时间的非凸上界,从而将基于用户维度的等待时间,近似为基于分区维度的等待时间,以简化该项表达式。其近似公式为:
14、
15、其中简化函数为:
16、
17、最后我们对非凸目标函数进行一阶泰勒展开,将其在指定点处转化为凸函数,从而应用凸优化技术求解资源分配问题。并使用逐次凸逼近技术逐渐调整初始点的位置,从而逐渐逼近原始问题的最优解。
18、在得到资源分配结果后,需要调整无人机轨迹最小化收缩率之和,由于等待时间已经从用户维度降低为分区维度,这个问题可以建模为基于分区收缩率的旅行商问题,但由于轨迹会影响优化目标中的等待时间,也就是说从分区i到j这条路径在最终轨迹中的顺序,会影响该路径的长度,因此我们无法事先建立对应的邻接矩阵,
19、为了简化路径成本,首先将优化目标中不受轨迹影响的部分移除掉,则有:
20、
21、考虑对基于分区维度的等待时间进行近似舍入,忽略不同分布的权重系数,从而可以建立基于分区收缩率的邻接矩阵。根据如下公式,任意两个分区i和j的路径成本表示为分区i的悬停时间和从分区i到j的飞行时间,这两个值均为已知量。此外,需要一个额外的顺序向量u作为决策变量,用于给路径附加不同权重。如果路径<i,j>在最终轨迹中是第一条路径,则应乘以权重g,g为分区总数,
22、
23、通过近似推导,我们将等待时间中的时序因素与优化目标分离,这使得邻接矩阵可以依赖于路径成本和顺序向量的乘积表达,而将顺序向量作为一个决策变量求解即可,此外,由于顺序向量表示了边在路径中的顺序,这与旅行商问题的miller-tucker-zemlin(mtz)模型中解决子环约束的顺序向量功能一致,因此,当g较小时,我们可以直接将轨迹规划问题根据该模型建模为如下整数规划问题:
24、
25、其中决策变量w为g*g的边选择矩阵,表示边<i,j>是否被选择为最终路径之一。常量矩阵c为g*g的邻接矩阵,表示边<i,j>的收缩率成本:
26、
27、g维向量u中的分量u[i]即为第i条边在最终路径中的序号,通过求解器可以得到轨迹的最优解,其中边选择矩阵w和顺序向量u可共同确定最终轨迹,当g较大时,可通过启发式方法如遗传算法或蚁群算法等解决旅行商问题。
28、本发明的有益效果
29、相比于现有技术,本发明的优点在于:
30、首先,本方法主要用于无人机边缘计算网络中不可分割任务的收缩率最小化问题。收缩率考虑了用户等待时间,因此相比于计算时间,该指标能更全面的衡量系统为用户设备带来的效率提升,从而提升整体的用户体验。由于等待时间为时序依赖变量,因此本方法采用了一系列技术处理该参数,从而降低优化问题的求解难度。
31、其次,对于类似的现有技术,本方法通过分区划分降低了问题规模,从而降低了算法复杂度,优化问题可以在可以接受的时间延迟内得到良好的次优解。再者,对比于强化学习或启发式方法等,本方法的精确度较高,可以得到更准确和更稳定的收敛效果。
- 还没有人留言评论。精彩留言会获得点赞!