一种基于5G-NR-CSI的测距测角联合三维定位方法与流程
本发明属于5g通信感知一体化,具体涉及一种基于5g-nr-csi的测距测角联合三维定位方法。
背景技术:
1、随着无线网络技术的发展,5g网络被应用在以增强移动宽带、超高可靠低时延通信和海量机器类通信为特点的应用场景中。而由于在越来越多的复杂应用场景中,感知功能与通信功能体现出高度耦合的特征,5g网络中通信感知一体化(isac)技术成为实现高速率无线通信与高精度感知服务的有效方案。利用5g信号对于感知信息的提取有多种方法,其中通过计算信道状态信息(csi)而完成环境信息的构建是近年来研究趋势,csi可以较精确的描述信号在信道传输中所携带的信息,是感知信息提取的重要途径。
2、感知功能的基本任务之一是对有源目标的探测与定位,其可以通过通信感知一体化技术在5g网络中实现。而在密集城市环境中,传统卫星定位服务由于建筑物遮挡等原因无法完成精确的用户定位功能,5g基站在城市的密集部署为5g网络定位提供了硬件条件。随着城市现代化发展,空中目标将成为城市中的必要元素,而地面定位系统无法满足对无人机等空中目标进行高精度定位的需求。
3、因此,如何使用符合5g nr(基于ofdm的空口设计的全球性5g标准)的通信信号,提取csi并完成定位功能,弥补传统地面定位系统对于三维空间定位能力的不足,并在完成高精度定位功能的同时减小计算量,是需要解决的关键问题。该问题的研究可以拓展定位场景的维度,提升定位服务性能。
技术实现思路
1、本发明的目的在于提供一种基于5g-nr-csi的测距测角联合三维定位方法,以解决城市峡谷等卫星拒止环境中的高精度三维定位问题,同时降低计算复杂度,有效降低定位时间成本。
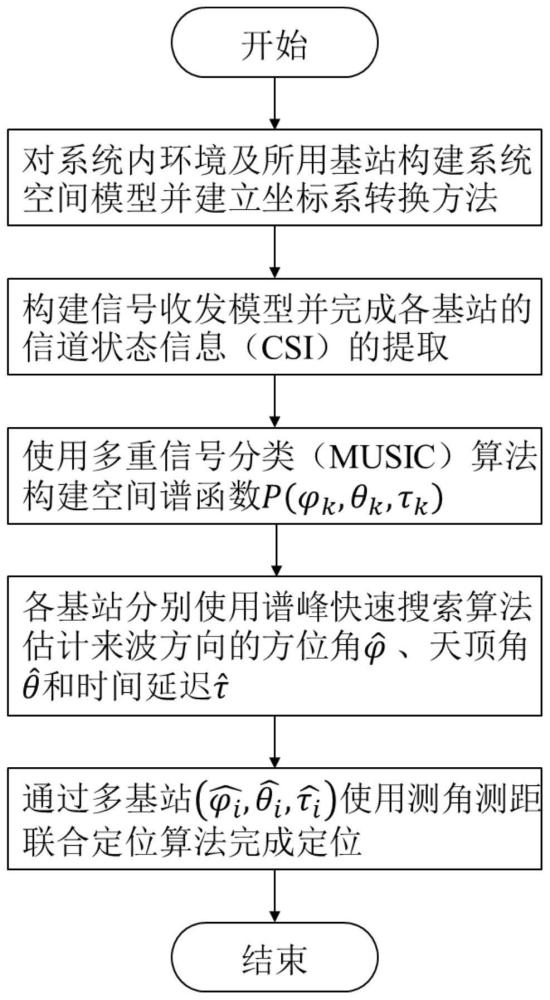
2、本发明所提供的一种基于5g-nr-csi的测距测角联合三维定位方法,其应用环境如下:基站集合为{bi|i=1,…,i},基站配备阵元数目为m×n的平面均匀阵列天线,天线均为固定状态不可移动或转动,所有基站可发射接收5g nr信号并完成用户间的通信。本发明所提定位方法具体步骤如下:
3、步骤一,对系统内环境及所用基站构建系统空间模型并建立坐标系转换方法。
4、在本发明所提及的三维定位场景中,建立系统坐标系用于描述位置信息及空间位置关系。系统坐标系可以直接使用符合习惯的当地地理坐标系,即x轴指向东向,y轴指向北向,z轴指向天顶,基站bi在系统坐标系下的位置坐标为wbi=[xbi,ybi,zbi]t。
5、本发明中所用基站配备平面均匀阵列天线并用于空间角度与距离测量,一般地,根据使用习惯建立天线本体坐标系,使天线平面与xoy平面重合,如图2a所示。在天线本体坐标系下,定义来波方向方位角是来波方向向量在xoy平面投影向量与x轴正半轴的夹角,天顶角θ是来波方向向量与z轴正半轴的夹角。由于本发明中使用测角联合测距的定位方法,有必要选择测角精度较高的坐标系建立方法,以满足高精度定位需求。方位角与天顶角采样点呈线性变化时,方位角与天顶角在以天线本体坐标系原点为球心的单位球面上呈现不均匀网格状分布。在进行测角计算时,球面上引入相同的误差时,网格较密集的部分所产生的测角误差较大,即球面上相同距离的误差会使较密集的部分跳变多个采样点,而较稀疏的部分跳变较少或不产生跳变,产生的测角误差较小。使用图2b中坐标系时,在正对平面阵列天线的区域网格点较稀疏,满足高精度测角需求,所以本发明中采用图2b所示坐标系作为天线本体坐标系。
6、为保证位置坐标等信息在不同坐标系下正确传递,记录平面均匀阵列天线在系统坐标系中的空间朝向,建立由天线本体坐标系到系统坐标系的旋转矩阵
7、
8、其中,ψ1i、ψ2i和ψ3i分别为系统坐标系围绕z轴、y轴、x轴旋转得到基站bi天线本体坐标系的角度。
9、步骤二,构建信号收发模型并完成信道状态信息的提取。
10、本发明系统中,待定位用户发射符合3gpp标准协议的5g nr信号,在信号帧中配置可用于提取csi的参考信号,如信道探测参考信号(srs)、信道状态信息参考信号(csi-rs)、定位参考信号(prs)等;i个配备平面均匀阵列天线的5g基站接收该用户发射的信息,每个基站分别完成小区搜索、频率偏差纠正、时间同步等信号盲处理后,对接收信号进行ofdm解调,通过资源栅格上参考信号所在资源块与已知的发射信息比较,可以获取在r个子载波上的csi信息。以下对csi分析并得到测角测距结果的过程对此i个基站相同。
11、平面均匀阵列天线上阵元(m,n)中的第r个子载波上携带的csi信息为
12、
13、其中,αk是第k个多径上的复衰减系数,φk(m)、θk(n)是第k个多径上由于空间传播角度带来的相位偏转,ωk(r)是第k个多径上时间延迟对csi相位的影响。
14、对于图2b所示天线本体坐标系,天线阵元(m,n)对csi相位影响为
15、
16、
17、其中,d、f、c分别表示平面阵列天线阵元间距、信号中心频率、信号传播速度,和θk分别表示来波方向的方位角和天顶角。
18、时间延迟对csi相位影响为
19、
20、其中,fδ表示csi的子载波间距,τk表示接收信号的时间延迟。
21、步骤三,使用多重信号分类(music)算法重构csi向量并建立空间谱函数。
22、music算法作为一种高分辨率空间谱估计算法,可用于完成空间到达角和空间传输时延的联合测量。music算法的关键思想是使用协方差矩阵的噪声子空间,通过特征向量与导向矢量正交的特性画出空间谱并得到测量结果。
23、本发明中将完成三维来波方向的估计,取平面阵列天线的x轴方向和z轴方向的两个均匀线性阵列组合,即阵元(1,1),…,(m,1),(1,2),…,(1,n),成为新的l型阵列天线,仅使用l型阵列天线所接收的信号进行分析,与使用整个平面阵列上所有阵元相比,降低了信息处理量,从而提升计算速度,以完成实时测角定位的要求。
24、将csi信息表达成矩阵形式
25、h=sa+n (6)
26、子载波r上l型阵列天线的csi向量hr=[h(1,1,r),…,h(m,1,r),h(1,2,r),…,h(1,n,r)]t组成含有不同天线阵元和不同子载波信息的csi向量h=[h1,…,hr]t,r=1,…,r,该向量长度为(m+n-1)·r,s=[s1,…,sk],k=1,…,k是导向矩阵,a=[α1,…,αk]t是k个多径上的复衰减系数向量,各阵元得到的csi的噪声为n=[n1,1,r,…,nm,1,r,n1,2,r,…,n1,n,r]t,r=1,…,r,根据公式(2),第k个多径上的导向矢量sk为
27、
28、由于music算法限制,需要满足独立重复测量次数大于多径数量,即代入的csi信息应为矩阵且列数大于k。参考csi平滑算法,将通过提取子向量的方法对原有csi向量h进行重构。csi向量重构后极大的降低了计算复杂度,可以有效提升计算效率。
29、从csi向量h中,从第1+(q-1)ps个元素起始,连续提取长度为ps×pa个元素,形成子向量xq,q=1,2…,q,将所有子向量按列排列成新的矩阵x=[x1,x2,…,xq]。相应地,从导向矢量sk中提取起始元素为1、长度相同的连续元素的子向量,得到导向向量为保证music算法的正确性,子向量长度取值ps=m+n-1,pa∈n+,使x矩阵各列信息所对应的导向向量相同。
30、使用music算法,计算x矩阵的协方差矩阵rx=xxh,并对rx矩阵特征值分解,提取噪声子空间的特征向量vn=[vk+1,…,vm+n-1]。由噪声子空间的特征向量与导向向量的正交性,构建空间谱函数
31、
32、步骤四,各基站分别使用谱峰快速搜索算法估计来波方向的方位角、天顶角和时间延迟。
33、为达到快速计算空间谱并得到精确谱峰值,设计谱峰快速搜索算法。设置搜索序列中心点搜索序列范围搜索序列步长则搜索序列为
34、
35、
36、
37、通过搜索序列遍历方位角、天顶角、时间延迟组代入到公式(8)中计算空间谱结果。搜索多个谱峰点
38、修改搜索序列中心点为缩小搜索序列范围、搜索序列步长,重新计算公式(8)的空间谱。
39、重复上述过程,直到谱峰点对应的方位角、天顶角、时间延迟的搜索步长均达到期望精度停止循环过程。
40、根据时间延迟判断是否为直射径,对每个基站完成上述测量,并记录基站bi的直射径测量值
41、步骤五,测角测距联合定位算法完成精确定位。
42、为完成三维定位功能,设计测角测距联合定位算法,通过i个基站测量的方位角、天顶角、时间延迟组基于最小二乘法完成定位估计。
43、由基站天线本体坐标系下测量的方位角天顶角得到基站bi本体坐标系下的来波方向向量
44、利用天线本体坐标系与系统坐标系的旋转矩阵rbi→g,计算系统坐标系下的来波方向向量ugi=rbi→gubi。
45、在接收机和发射机完成较准确的时间同步时,计算基站与用户间距离
46、在多基站定位场景中,利用待测用户坐标wu=[xu,yu,zu]t与基站测量的方向向量ugi、距离li,建立方程组
47、
48、其中,wbi=[xbi,ybi,zbi]t表示基站在系统坐标系下的坐标,n1i、n2i是全局坐标系下方向向量和距离的测量噪声。
49、需求解方程组
50、
51、最小二乘法是一种经典的参数估计方法,适用于此处矛盾方程组的求解问题。通过计算方程组(13)的一阶泰勒展开,可知在第t+1次迭代中的位置估计值为
52、
53、其中,是方程组(13)在处的雅各比矩阵。
54、多次迭代直至收敛,最终得到的位置估计值即为用户定位结果
55、本发明一种基于5g-nr-csi的测距测角联合三维定位方法,和现有方法相比,其优势和有益效果在于:
56、(a)本发明综合考虑了基站测量用户的方位角和天顶角的二维空间角,提出了一种基于csi分析的二维空间角和时间延迟联合估计算法,能够完成距离和角度同步测量,适应三维定位场景,可以实现地面及空中用户的精确定位,从而拓展定位应用场景,适应未来通信感知一体化场景需求。
57、(b)本发明设计了谱峰快速搜索算法,通过设计阶梯式搜索步长,在使角度估计与时间延时估计达到较高搜索精度的前提下,极大的降低了计算量,使计算效率提升,提升了定位服务的性能。
- 还没有人留言评论。精彩留言会获得点赞!