一种车钥匙定位方法、装置、设备及计算机可读存储介质与流程
本发明涉及车辆的数字钥匙定位领域,特别涉及一种车钥匙定位方法、装置、设备及计算机可读存储介质。
背景技术:
1、在uwb(ultra wide band,超带宽)定位中,toa(time of arrival,到达时间)是一种常见的测量方式,通过测量信号从发送器到接收器的传播时间,计算目标位置。
2、现有技术中,采用ls(least square,最小二乘法)基于测量的toa数据,通过最小化toa测量值与预测值之间的误差平方和,来估计目标位置坐标;这种方式是通过一个线性方程组得到一个固定形式的封闭解。然而,uwb信号在车内环境中容易受到多径效应的影响,导致接受的信号存在多个传播路径,从而使得测量toa变得复杂,且ls定位方法对多径效应敏感,会导致定位误差较大;且ls定位方法对噪声和测量误差较为敏感,使得测量数据中存在噪声时,会导致定位精度下降;而且ls定位方法需要较高的计算复杂度,且需要大量的测量样本来估计定位参数,这会导致定位过程的复杂性较高,需要更多的计算资源和时间。
3、因此,如何能够减少由多径传播带来的误差影响,适用于较为复杂的车辆环境的uwb定位场景,快速准确对车钥匙进行定位,是现今急需解决的问题。
技术实现思路
1、本发明的目的是提供一种车钥匙定位方法、装置、设备及计算机可读存储介质,以减少由多径传播带来的误差影响,适用于较为复杂的车辆环境的uwb定位场景,快速准确对车钥匙进行定位。
2、为解决上述技术问题,本发明提供一种车钥匙定位方法,包括:
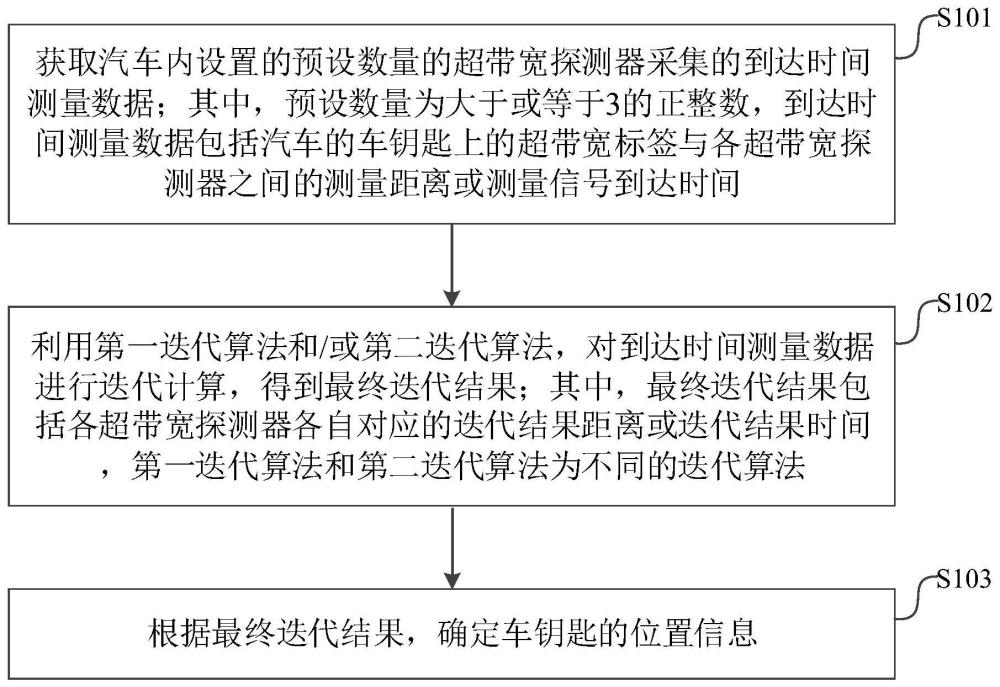
3、获取汽车内设置的预设数量的超带宽探测器采集的到达时间测量数据;其中,所述预设数量为大于或等于3的正整数,所述到达时间测量数据包括所述汽车的车钥匙上的超带宽标签与各所述超带宽探测器之间的测量距离或测量信号到达时间;
4、利用第一迭代算法和/或第二迭代算法,对所述到达时间测量数据进行迭代计算,得到最终迭代结果;其中,所述最终迭代结果包括各所述超带宽探测器各自对应的迭代结果距离或迭代结果时间,所述第一迭代算法和所述第二迭代算法为不同的迭代算法;
5、根据所述最终迭代结果,确定所述车钥匙的位置信息。
6、在一些实施例中,所述利用第一迭代算法和/或第二迭代算法,对所述到达时间测量数据进行迭代计算,得到最终迭代结果,包括:
7、利用所述第一迭代算法,对所述测量距离进行迭代计算,得到各所述超带宽探测器各自对应的初次迭代距离;
8、利用所述第二迭代算法,对所述初次迭代距离进行迭代计算,得到所述迭代结果距离。
9、在一些实施例中,所述第一迭代算法和所述第二迭代算法分别为所述兰德韦伯迭代法和所述共轭梯度法;所述第一迭代算法为所述兰德韦伯迭代法时,所述第二迭代算法为所述共轭梯度法;所述第一迭代算法为所述共轭梯度法时,所述第二迭代算法为所述兰德韦伯迭代法。
10、在一些实施例中,所述预设数量为3,所述第一迭代算法为所述兰德韦伯迭代法时,所述利用第一迭代算法,对所述测量距离进行迭代计算,得到各所述超带宽探测器各自对应的初次迭代距离,包括:
11、利用da(j+1)=da(j)+α(v(ta-δa)-da(j))、db(k+1)=db(k)+α(v(tb-δb)-db(k))和dc(l+1)=dc(l)+α(v(tc-δc)-dc(l)),分别对三个所述超带宽探测器各自对应的测量距离进行迭代计算,得到所述初次迭代距离;其中,j、k和l分别为三个所述超带宽探测器各自对应的测量距离的当前迭代次数-1,ta、tb和tc分别为三个所述超带宽探测器各自对应的预设初始时间,δa、δb和δc分别为三个所述超带宽探测器各自对应的预设误差时间,da(j+1)、db(k+1)和dc(l+1)分别为三个所述超带宽探测器各自对应的当前迭代次数的迭代距离;da(0)、db(0)和dc(0)为所述测量距离,α为预设步长。
12、在一些实施例中,所述利用da(j+1)=da(j)+α(v(ta-δa)-da(j))、db(k+1)=db(k)+α(v(tb-δb)-db(k))和dc(l+1)=dc(l)+α(v(tc-δc)-dc(l)),分别对三个所述超带宽探测器各自对应的测量距离进行迭代计算,得到所述初次迭代距离,包括:
13、根据所述超带宽标签与超带宽探测器a之间的测量距离,获取da(0),并初始化获取ta和δa,令超带宽探测器a对应的当前迭代次数为1,其中,所述超带宽探测器包括所述超带宽探测器a、超带宽探测器b和超带宽探测器c;
14、利用da(j+1)=da(j)+α(v(ta-δa)-da(j)),计算超带宽探测器a对应的当前迭代次数的迭代距离;
15、判断是否满足超带宽探测器a对应的当前迭代次数达到迭代次数阈值或da(j+1)与da(j)之差的绝对值小于残差阈值;
16、若否,则令超带宽探测器a对应的当前迭代次数加1,并执行所述利用da(j+1)=da(j)+α(v(ta-δa)-da(j)),计算超带宽探测器a对应的当前迭代次数的迭代距离的步骤;
17、若是,则将da(j+1)作为所述超带宽探测器a对应的初次迭代距离。
18、在一些实施例中,所述预设数量为3,所述第二迭代算法为所述共轭梯度法时,所述利用所述第二迭代算法,对所述初次迭代距离进行迭代计算,得到所述迭代结果距离,包括:
19、利用和分别对三个所述超带宽探测器各自对应的初次迭代距离进行迭代计算,得到所述迭代结果距离;其中,和分别为三个所述超带宽探测器各自对应的当前迭代次数的二次迭代距离,和为所述初次迭代距离,m、n和o分别为三个所述超带宽探测器各自对应的初次迭代距离的当前迭代次数-1;ta2、tb2和tc2分别为三个所述超带宽探测器各自对应的预设二次迭代初始时间,δa2、δb2和δc2分别为三个所述超带宽探测器各自对应的预设二次迭代误差时间,为一阶求导。
20、在一些实施例中,所述利用和分别对三个所述超带宽探测器各自对应的初次迭代距离进行迭代计算,得到所述迭代结果距离,包括:
21、根据超带宽探测器a各自对应的初次迭代距离,获取并初始化获取ta2和δa2,令超带宽探测器a对应的当前迭代次数为1,其中,所述超带宽探测器包括所述超带宽探测器a、超带宽探测器b和超带宽探测器c;
22、利用计算超带宽探测器a对应的当前迭代次数的二次迭代距离;
23、判断是否满足与之差的绝对值小于二次迭代残差阈值或小于更新方向阈值;
24、若否,则令超带宽探测器a对应的当前迭代次数加1,并执行所述利用计算超带宽探测器a对应的当前迭代次数的二次迭代距离;
25、若是,则将作为所述超带宽探测器a对应的迭代结果距离。
26、本发明还提供了一种车钥匙定位装置,包括:
27、采集获取模块,用于获取汽车内设置的预设数量的超带宽探测器采集的到达时间测量数据;其中,所述预设数量为大于或等于3的正整数,所述到达时间测量数据包括所述汽车的车钥匙上的超带宽标签与各所述超带宽探测器之间的测量距离或测量信号到达时间;
28、迭代计算模块,用于利用第一迭代算法和/或第二迭代算法,对所述到达时间测量数据进行迭代计算,得到最终迭代结果;其中,所述最终迭代结果包括各所述超带宽探测器各自对应的迭代结果距离或迭代结果时间,所述第一迭代算法和所述第二迭代算法为不同的迭代算法;
29、定位计算模块,用于根据所述最终迭代结果,确定所述车钥匙的位置信息。
30、本发明还提供了一种车钥匙定位设备,包括:
31、存储器,用于存储计算机程序;
32、处理器,用于执行所述计算机程序时实现如上述所述的车钥匙定位方法的步骤。
33、此外,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述所述的车钥匙定位方法的步骤。
34、本发明所提供的一种车钥匙定位方法,包括:获取汽车内设置的预设数量的超带宽探测器采集的到达时间测量数据;其中,预设数量为大于或等于3的正整数,到达时间测量数据包括汽车的车钥匙上的超带宽标签与各超带宽探测器之间的测量距离或测量信号到达时间;利用第一迭代算法和/或第二迭代算法,对到达时间测量数据进行迭代计算,得到最终迭代结果;其中,最终迭代结果包括各超带宽探测器各自对应的迭代结果距离或迭代结果时间,第一迭代算法和第二迭代算法为不同的迭代算法;根据最终迭代结果,确定车钥匙的位置信息;
35、可见,本发明通过利用第一迭代算法和/或第二迭代算法,对到达时间测量数据进行迭代计算,得到最终迭代结果,利用迭代算法计算得到的非封闭解,替换现有的最小二乘法获得的封闭解,能够减少由多径传播带来的误差影响,适用于较为复杂的车辆环境的uwb定位场景,并且迭代算法的使用能够更好地应对测量误差的影响,提高了车钥匙定位的速度和准确性。此外,本发明还提供了一种车钥匙定位装置、设备及计算机可读存储介质,同样具有上述有益效果。
- 还没有人留言评论。精彩留言会获得点赞!