基于类卡尔曼无偏FIR滤波器的载波相位跟踪方法及装置与流程
本技术涉及载波同步,尤其是一种基于类卡尔曼无偏fir滤波器的载波相位跟踪方法及装置。
背景技术:
1、随着军用、民用飞行器和导弹系统的飞速发展,机载/弹载目标同卫星之间径向瞬时速度、加速度和加加速度越来越大,且动态环境下高速载体具有强非线性、快时变、强耦合等特殊性,急剧增加了高动态接收机精准载波同步的难度。
2、经典卡尔曼滤波器是线性高斯过程的一种简单且全局最优的状态估计器,广泛应用于众多领域。卡尔曼滤波的状态估计方法是以最小均方误差作为估计最佳准则,采用信号与噪声的状态空间模型,状态变量的估计是根据前一时刻的估计值和当前时刻的观测值来更新。为了保证卡尔曼滤波的状态估计值的最优性,需要已知准确的状态噪声信息和测量噪声信息,在实际应用过程中,随机的外部干扰几乎不服从高斯统计量,一旦载体运动状态发生改变或存在其他干扰的情况下,其估计误差将急剧上升。
技术实现思路
1、本技术的目的在于克服现有技术中卡尔曼载波跟踪算法在高动态条件下鲁棒性较差的问题,提供一种基于类卡尔曼无偏fir滤波器的载波相位跟踪方法及装置。
2、第一方面,提供了一种基于类卡尔曼无偏fir滤波器的载波相位跟踪方法,包括:
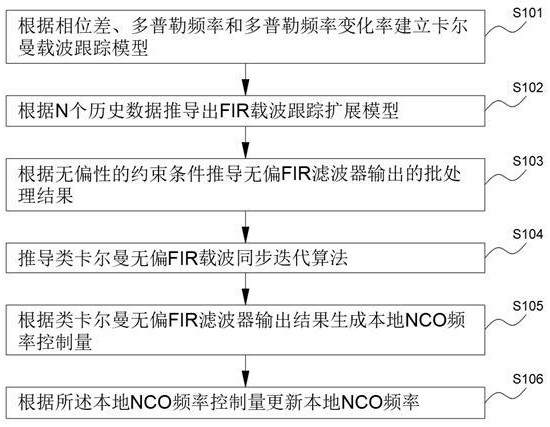
3、根据相位差、多普勒频率和多普勒频率变化率建立卡尔曼载波跟踪模型;
4、根据n个历史数据推导出fir载波跟踪扩展模型;
5、根据无偏性的约束条件推导无偏fir滤波器输出的批处理结果;
6、推导类卡尔曼无偏fir载波同步迭代算法;
7、根据类卡尔曼无偏fir滤波器输出结果生成本地nco频率控制量;
8、根据所述本地nco频率控制量更新本地nco频率。
9、进一步的,所述卡尔曼载波跟踪模型为:
10、 (1)
11、 (2)
12、其中,,,,,,,, 为载波相位偏差,为多普勒频率偏差,为多普勒频率差变化率,和分别为 n-1时刻滤波器预报的载波相位偏差和本地nco复制产生的多普勒频率,为载波环路更新时间,过程噪声由接收机基准时钟相位偏离、频率偏移及接收机和运动载体之间沿视线方向的加速度引起,是环路鉴相器输出的接收信号与本地复现载波相位差,代表测量高斯白噪声,方差为 r。
13、进一步的,所述fir载波跟踪扩展模型为:
14、(3)
15、(4)
16、 (5)
17、(6)
18、(7)
19、(8)
20、其中,,
21、,,,,,。
22、进一步的,根据无偏性的约束条件推导无偏fir滤波器输出的批处理结果,包括:
23、利用区间[ m, n]的 n 个历史数据作为fir滤波器的输入,则的估计值表示为:
24、 (9)
25、 (10)
26、其中,为fir滤波器的增益矩阵,当公式(10)成立时,估计就是无偏fir估计;
27、根据公式(3)得出:
28、 (11)
29、其中,、分别是矩阵和的第 n 行向量;
30、忽略过程噪声和测量噪声,根据公式(4)、公式(9)和公式(11)得出:
31、(12)
32、根据线性系统理论得出:系统方程在零输入和零状态时对应系统的零输入响应和零状态响应,且系统完全响应可以由零输入响应和零状态响应线性相加得到,对于式(12)可以分为:
33、1),零输入响应的增益矩阵满足;
34、2),零状态响应的增益矩阵满足;
35、根据无偏性的约束条件可以计算得到零输入响应的增益矩阵和零状态响应的增益矩阵满足公式(13)和公式(14):
36、 (13)
37、 (14)
38、由零输入响应和零状态响应线性相加的无偏fir滤波器响应的批处理形式为:
39、 (15)。
40、进一步的,所述类卡尔曼无偏fir载波同步迭代算法的初始输入由公式(15)计算得出,整个迭代过程开始于m+v,v = k,结束于v = n-1,随着新的观测值不断输入,新的状态估计值在前一时刻的基础上被更新。
41、进一步的,所述类卡尔曼无偏fir载波同步迭代算法包括:
42、状态变量包括接收载波和本地载波之间的相位差、频率差、频率变化率,因此,k=3,初始化历史数据点数n,所述类卡尔曼无偏fir载波同步迭代算法开始于n=n;
43、判断n是否大于等于n,若判断结果为否,则输出;若判断结果为是,则通过公式(16)和公式(17)计算中间变量m和s:
44、 (16)
45、 (17)
46、通过公式(18)计算辅助增益矩阵:
47、 (18)
48、根据[m,s]的观测值按照公式(19)计算预测向量:
49、 (19)
50、其中,为预测向量,,;
51、 (20)
52、 (21)
53、 (22)
54、判断v是否处于区间[k,n-1)内,若判断结果为是,则按照公式(20)、公式(21)和公式(22)迭代计算;若判断结果为否,则输出:。
55、进一步的,所述本地nco频率控制量的计算公式为:
56、 (23)
57、其中,为本地nco频率控制量。
58、第二方面,提供了一种基于类卡尔曼无偏fir滤波器的载波相位跟踪装置,包括:
59、模型建立模块,用于根据相位差、多普勒频率和多普勒频率变化率建立卡尔曼载波跟踪模型;
60、模型扩展模块,用于根据n个历史数据推导出fir载波跟踪扩展模型;
61、第一推导模块,用于根据无偏性的约束条件推导无偏fir滤波器输出的批处理结果;
62、第二推导模块,用于推导类卡尔曼无偏fir载波同步迭代算法;
63、计算模块,用于根据类卡尔曼无偏fir滤波器输出结果生成本地nco频率控制量;
64、更新模块,用于根据所述本地nco频率控制量更新本地nco频率。
65、第三方面,提供了一种计算机可读存储介质,所述计算机可读介质存储用于设备执行的程序代码,该程序代码包括用于执行如第一方面中的任意一种实现方式中方法的步骤。
66、第四方面,提供了一种电子设备,所述电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第一方面中的任意一种实现方式中的方法。
67、本技术具有如下有益效果:本技术基于传统卡尔曼载波跟踪模型,首次建立了无需考虑状态噪声信息和测量噪声信息的类卡尔曼无偏fir载波跟踪扩展模型,并给出了类卡尔曼无偏fir载波同步迭代算法,仿真结果表明该算法相比于传统的卡尔曼载波跟踪算法,具有更强的鲁棒性,类卡尔曼无偏fir载波跟踪环路能够在加加速度100g/s的高动态环境下依旧保持相位、频率稳定跟踪。
- 还没有人留言评论。精彩留言会获得点赞!