无人机拍照的控制方法、装置、电子设备及存储介质与流程
本技术涉及无人机,具体而言,涉及一种无人机拍照的控制方法、装置、电子设备及存储介质。
背景技术:
1、随着拍摄技术的不断发展,采用无人机进行智能航拍,实现环绕和跟随目标的控制,同时还能同时横向平移、竖直移动各种角度的俯拍。
2、目前,通过控制无人机飞行以及拍摄摄像机的拍摄参数来调整拍摄参数,进而无人机根据拍摄参数进行的拍摄,从而达到满足用户需求的拍摄角度的拍摄结果,拍摄完成后才能对拍摄结果进行查看,在不满意的情况下,需要重新拍摄,极大的影响了拍摄效率。
3、无人机在拍摄的过程中,根据拍摄要求,在用户划定区域内自动生成航区、航线和航点,无人机挂载不同类型的吊舱在规划航线下执行拍摄任务;进一步在生成航线中,可能会有障碍物,因此,会影响拍摄的安全。综上,如何在复杂环境下,提高无人机拍照效率,并提升无人机及自主拍摄中安全性是目前急需解决的问题。
技术实现思路
1、本技术提供一种无人机拍照的控制方法、装置、电子设备及存储介质,通过本技术的技术方案,通过在预先存储的场景模型下,响应于截图指令,获取与所述截图指令对应的当前截图;根据所述当前截图,确定与所述当前截图对应的航点拍摄信息,其中,所述航点拍摄信息至少包括拍摄位置信息及拍摄参数信息;根据所述拍摄位置信息,生成与所述航点拍摄信息对应的航线信息;将所述航线信息发送至无人机,以使所述无人机到达与所述拍摄位置信息对应的航点,并根据所述航点拍摄信息中的所述拍摄参数信息进行拍照,本技术中,预先在存储的场景模型下,获取与截图指令对应的当前截图,并根据截图生成航点拍摄信息,在航点为安全航点的情况下,根据各个安全航点的拍摄位置信息生成航线信息,无人机根据航线信息中的航点拍摄信息进行拍照,从而由于拍照前可以在三维模型中预览,之后根据预览选择的视角自动生成拍照点,控制无人机直接飞到拍照点进行拍照,通过预览场景模型下的截图,用户可以提前预览到无人机挂载相机到达实际拍照点后可能拍摄得到图像,利用截图对应的航点拍摄信息无人机拍摄得到与截图对应的拍摄图像,提高无人机的拍照效率和用户体验。
2、第一方面,本技术提供了一种无人机拍照的控制方法,包括:
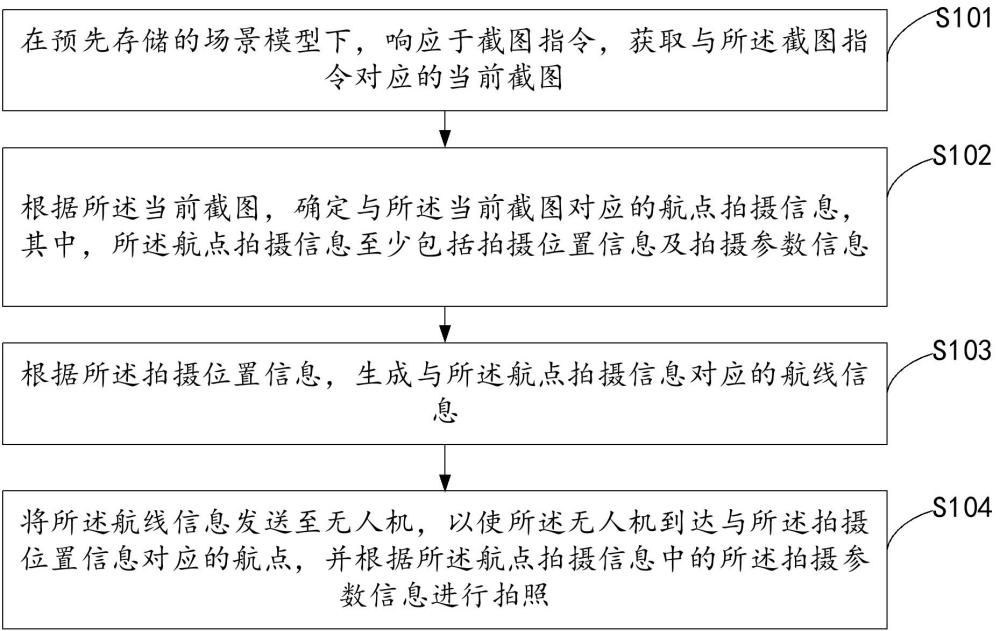
3、在预先存储的场景模型下,响应于截图指令,获取与所述截图指令对应的当前截图;
4、根据所述当前截图,确定与所述当前截图对应的航点拍摄信息,其中,所述航点拍摄信息至少包括拍摄位置信息及拍摄参数信息;
5、根据所述拍摄位置信息,生成与所述航点拍摄信息对应的航线信息;
6、将所述航线信息发送至无人机,以使所述无人机到达与所述拍摄位置信息对应的航点,并根据所述航点拍摄信息中的所述拍摄参数信息进行拍照。
7、本技术通过预先在存储的场景模型下,获取与截图指令对应的当前截图,并根据截图生成航点拍摄信息,在航点为安全航点的情况下,根据各个安全航点的拍摄位置信息生成航线信息,无人机根据航线信息中的航点拍摄信息进行拍照,从而由于拍照前可以在三维模型中预览,之后根据预览选择的视角自动生成拍照点,控制无人机直接飞到拍照点进行拍照,通过预览场景模型下的截图,用户可以提前预览到无人机挂载相机到达实际拍照点后可能拍摄得到图像,利用截图对应的航点拍摄信息无人机拍摄得到与截图对应的拍摄图像,提高无人机的拍照效率和用户体验。
8、可选地,所述拍摄参数信息包括拍摄姿态信息和相机变焦信息,其中,所述拍摄姿态信息包括云台姿态或无人机姿态。
9、可选地,所述预先存储的场景模型为三维模型。
10、可选地,所述根据所述当前截图,确定与所述当前截图对应的航点拍摄信息,包括:
11、在所述当前截图满足用户要求的情况下,根据所述当前截图,确定与所述当前截图对应的航点拍摄信息。
12、可选地,在所述响应于截图指令,获取与所述截图指令对应的当前截图之后,所述方法还包括:
13、在所述当前截图不满足用户要求的情况下,获取视角修改指令;
14、根据所述视角修改指令,重新获取与所述视角修改指令对应的控制截图,其中,所述控制截图包括更新后的航点拍摄信息。
15、可选地,所述根据所述拍摄位置信息,生成与所述航点拍摄信息对应的航线信息,包括:
16、对每一个所述拍摄位置信息进行点位碰撞检测;
17、在每一个所述拍摄位置信息为安全航点拍摄信息的情况下,根据所述拍摄位置信息生成与所述航点拍摄信息对应的航线信息。
18、可选地,所述对每一个所述拍摄位置信息进行点位碰撞检测,包括:
19、获取每一个航点拍摄信息对应的拍摄位置信息,其中,所述拍摄位置信息至少包括经度、纬度和海拔信息;
20、以所述拍摄位置信息对应的航点为检测中心,根据第一预设距离构建与所述检测中心对应的第一碰撞检测模型;
21、根据所述第一碰撞检测模型和第一虚拟检测线,对每一个航点进行碰撞检测,其中,所述第一虚拟检测线是所述第一碰撞检测模型中的一个顶点与其他顶点形成的射线。
22、本技术获取每一个航点拍摄信息对应的拍摄位置信息,并对该航点进行碰撞检测,在该航点为不安全航点的情况下,每隔一定距离对下一个航点拍摄信息进行点位碰撞信息,保证航线中的每个航点拍摄信息对应的航点都是安全航点。
23、可选地,所述在每一个所述拍摄位置信息为安全航点拍摄信息的情况下,根据所述拍摄位置信息生成与所述航点拍摄信息对应的航线信息,包括:
24、在所述第一碰撞检测模型、所述第一虚拟检测线和所述场景模型未发生碰撞的情况下,将所述航点拍摄信息确定为安全航点拍摄信息;
25、根据所述安全航点和设备航点,确定与安全航点对应的初始航线信息;
26、对所述初始航线信息进行碰撞检测;
27、在所述初始航线信息为安全航线信息的情况下,将所述初始航线信息确定为与所述航点拍摄信息对应的航线信息。
28、本技术通过对每个航点进行点位碰撞检测,在每个航点为安全航点的情况下,生成航线信息,无人机根据航线信息中的航点进行拍照,提高拍照效率。
29、可选地,所述根据所述当前截图,确定与所述当前截图对应的航点拍摄信息,包括:
30、获取所述当前截图携带的相机姿态信息;
31、将所述当前截图携带的相机姿态信息转换成无人机姿态信息或者云台姿态;
32、根据所述屏幕宽度,计算与所述当前截图对应的相机变焦信息;
33、根据所述相机姿态信息、所述无人机姿态信息和所述相机变焦信息,生成与所述当前截图对应的拍摄位置信息。
34、本技术获取当前截图的相机姿态信息、无人机姿态信息和相机变焦信息,生成与当前截图对应的航点拍摄信息,可以提高航点定位的准确性。
35、可选地,所述将所述当前截图携带的相机姿态信息转换成无人机姿态信息,包括:
36、将所述相机姿态信息中的弧度信息,转换成所述无人机姿态信息中的角度信息;
37、将所述相机姿态信息中的角度信息,转换成所述无人机姿态信息中的弧度信息。
38、本技术中将获取到的截图中的相机姿态信息中的各个参数转换成无人机姿态信息,从而可以更好的生成航线,提高航线生成的准确性。
39、可选地,所述根据所述屏幕宽度,计算与所述当前截图对应的相机变焦信息,包括:
40、根据屏幕宽度和预设算法,计算与所述当前截图对应的相机变焦信息。
41、本技术中根据屏幕宽度和预设算法,计算与所述当前截图对应的相机变焦信息,根据所述相机姿态信息、所述无人机姿态信息和所述相机变焦信息,生成与所述当前截图对应的航点拍摄信息,从而可以更好的生成航线,提高航线生成的准确性。
42、第二方面,本技术提供了一种无人机拍照的控制装置,包括:
43、获取模块,用于在预先存储的场景模型下,响应于截图指令,获取与所述截图指令对应的当前截图;
44、确定模块,用于根据所述当前截图,确定与所述当前截图对应的航点拍摄信息,其中,所述航点拍摄信息至少包括拍摄位置信息及拍摄参数信息;
45、生成模块,用于根据所述拍摄位置信息,生成与所述航点拍摄信息对应的航线信息;
46、拍照模块,用于将所述航线信息发送至无人机,以使所述无人机到达与所述拍摄位置信息对应的航点,并根据所述航点拍摄信息中的所述拍摄参数信息进行拍照。
47、本技术通过预先在存储的场景模型下,获取与截图指令对应的当前截图,并根据截图生成航点拍摄信息,在航点为安全航点的情况下,根据各个安全航点的拍摄位置信息生成航线信息,无人机根据航线信息中的航点拍摄信息进行拍照,从而由于拍照前可以在三维模型中预览,之后根据预览选择的视角自动生成拍照点,控制无人机直接飞到拍照点进行拍照,通过预览场景模型下的截图,用户可以提前预览到无人机挂载相机到达实际拍照点后可能拍摄得到图像,利用截图对应的航点拍摄信息无人机拍摄得到与截图对应的拍摄图像,提高无人机的拍照效率和用户体验。
48、可选地,所述拍摄参数信息包括拍摄姿态信息和相机变焦信息,其中,所述拍摄姿态信息包括云台姿态或无人机姿态。
49、可选地,所述预先存储的场景模型为三维模型。
50、可选地,所述确定模块,用于:
51、在所述当前截图满足用户要求的情况下,根据所述当前截图,确定与所述当前截图对应的航点拍摄信息。
52、可选地,所述确定模块还用于:
53、所述当前截图不满足用户要求的情况下,获取视角修改指令;
54、根据所述视角修改指令,重新获取与所述视角修改指令对应的控制截图,其中,所述控制截图包括更新后的航点拍摄信息。
55、可选地,所述生成模块用于:
56、对每一个所述拍摄位置信息进行点位碰撞检测;
57、在每一个所述拍摄位置信息为安全航点拍摄信息的情况下,根据所述拍摄位置信息生成与所述航点拍摄信息对应的航线信息。
58、可选地,所述生成模块用于:
59、获取每一个航点拍摄信息对应的拍摄位置信息,其中,所述拍摄位置信息至少包括经度、纬度和海拔信息;
60、以所述拍摄位置信息对应的航点为检测中心,根据第一预设距离构建与所述检测中心对应的第一碰撞检测模型;
61、根据所述第一碰撞检测模型和第一虚拟检测线,对每一个航点进行碰撞检测,其中,所述第一虚拟检测线是所述第一碰撞检测模型中的一个顶点与其他顶点形成的射线。
62、本技术获取每一个航点拍摄信息对应的位置信息,并对该航点拍摄信息进行碰撞检测,同时每个一定距离对下一个航点拍摄信息进行碰撞信息,保证航线中的每个航点拍摄信息对应的航点都是安全航点。
63、可选地,所述生成模块用于:
64、在所述第一碰撞检测模型、所述第一虚拟检测线和所述场景模型未发生碰撞的情况下,将所述航点拍摄信息确定为安全航点拍摄信息;
65、根据所述安全航点和设备航点,确定与安全航点对应的初始航线信息;
66、对所述初始航线信息进行碰撞检测;
67、在所述初始航线信息为安全航线信息的情况下,将所述初始航线信息确定为与所述航点拍摄信息对应的航线信息。
68、本技术通过对每个航点进行检测,在每个航点为安全航点的情况下,生成航线信息,无人机根据航线信息中的航点进行拍照,提高拍照效率。
69、可选地,所述确定模块用于:
70、获取所述当前截图携带的相机姿态信息;
71、将所述当前截图携带的相机姿态信息转换成无人机姿态信息或者云台姿态;
72、根据所述屏幕宽度,计算与所述当前截图对应的相机变焦信息;
73、根据所述相机姿态信息、所述无人机姿态信息和所述相机变焦信息,生成与所述当前截图对应的拍摄位置信息。
74、本技术获取当前截图的相机姿态信息、无人机姿态信息和相机变焦信息,生成与当前截图对应的航点拍摄信息,可以提高航点定位的准确性。
75、可选地,所述确定模块用于:
76、将所述相机姿态信息中的弧度信息,转换成所述无人机姿态信息中的角度信息;
77、将所述相机姿态信息中的角度信息,转换成所述无人机姿态信息中的弧度信息。
78、本技术中将获取到的截图中的相机姿态信息中的各个参数转换成无人机姿态信息,从而可以更好的生成航线,提高航线生成的准确性。
79、可选地,所述确定模块用于:
80、根据屏幕宽度和预设算法,计算与所述当前截图对应的相机变焦信息。
81、本技术中根据屏幕宽度和预设算法,计算与所述当前截图对应的相机变焦信息,根据所述相机姿态信息、所述无人机姿态信息和所述相机变焦信息,生成与所述当前截图对应的航点拍摄信息,从而可以更好的生成航线,提高航线生成的准确性。
82、第三方面,本技术提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述程序时可实现如第一方面任一实施例所述的无人机拍照的控制方法。
83、第四方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时可实现如第一方面任一实施例所述的无人机拍照的控制方法。
84、第五方面,本技术提供一种计算机程序产品,所述的计算机程序产品包括计算机程序,其中,所述的计算机程序被处理器执行时可实现如第一方面任一实施例所述的无人机拍照的控制方法。
- 还没有人留言评论。精彩留言会获得点赞!