一种基于半实物仿真系统的无人机集群自组网算法的制作方法
本发明涉及无人机通信,尤其涉及一种基于半实物仿真系统的无人机集群自组网算法。
背景技术:
1、近年来,随着无人技术,通信与网络技术的高速发展,无人机凭借机动性高、灵活性强、分布协同性高等特点,被广泛应用于智慧农业、灾害预测、战场环境中。而无人机因受到自身能量、载荷等硬件设备的限制,难以独自完成复杂且高难度的任务,故而无人机集群协同作业成为首要发展趋势。
2、由于无人机集群运动速度快,移动位置具有随机性,节点规模大、基站依赖性强等其他因素使得无人机集群在恶劣或高危的环境中执行任务时,易出现网络中断丢包、节点失效等情况。故而无人机之间建立高效稳定网络通信拓扑结构是确保协同完成作业的首要。为不依赖地面基础通信设备,各个无人机节点可以平等且自由的交换感知、控制等信息,往往采用飞行自组织网络构建通信连接。然而无人机之间的移动性,环境的复杂性,能量的有限性使得网络的拓扑结构频繁发生改变,导致网络不稳定,缩短网络生命周期,使得无人机集群无法快速高效完成任务。因此,对无人机集群自组网算法的研究有重要意义。
3、而目前对无人机集群的相关仿真研究工作主要包括纯数字仿真、半实物仿真和实物实验等。当前对无人机自组网算法的性能与有效性的研究,大多数均采用纯数字仿真的技术进行验证,无法真实有效的模拟自然环境中存在的各种干扰的情况,使得算法可信性较低,可能难以适用于工程性的应用。为提升算法的可信度,接近真实的实物验证的运行状态,半实物仿真系统作为实物验证的先决条件,研究基于半实物仿真系统的算法研究具有一定的应有价值。相比纯数字仿真,半实物仿真系统选择性的引入硬件设备,代替数字模型,有效的模拟实际环境中存在的不定性影响,使得仿真结果更加逼真于现实,提高结果的可信性;而相比于实物实验,半实物仿真可以有效降低人力、物力与财力,并且能以几乎真实的结果验证系统的性能。
4、在目前无人机自组网算法的研究中,常采用分簇的方式对无人机集群进行分级分层的管理,现有的技术方案为:
5、(1)为每个无人机分配唯一标识的id,选取标识id最小的无人机作为簇头。
6、(2)基于加权分簇算法,以充分考虑节点度、无人机之间距离、无人机能耗以及移动性构建簇头竞争权值。
7、(3)改进贪婪算法,以无人机的能耗和节点拥塞度构建最短数据转发路径。
8、(4)根据无人机节点的位置和能量计算自适应值,选择最大值为簇头,并引入簇头轮换机制维护网络稳定性。
9、现有技术的缺点有:
10、(1)未充分考虑无人机集群分簇算法在复杂环境的适用性、以及未满足复杂环境簇头选择的性能需求。
11、(2)考虑因素单一,只能保证单一性能最优。
12、(3)基于纯数字仿真系统验证自组网通信算法的有效性时,存在可信性低的问题。
技术实现思路
1、为了解决上述问题,本发明提出一种基于半实物仿真系统的无人机集群自组网算法,能真实模拟无人机集群自组网的过程,验证无人机集群自组网算法的有效性与工程应用性并且能有效延长网络生命周期,均衡集群能耗,提高网络稳定性。
2、本发明采用的技术方案如下:
3、一种基于半实物仿真系统的无人机集群自组网算法,包括以下步骤:
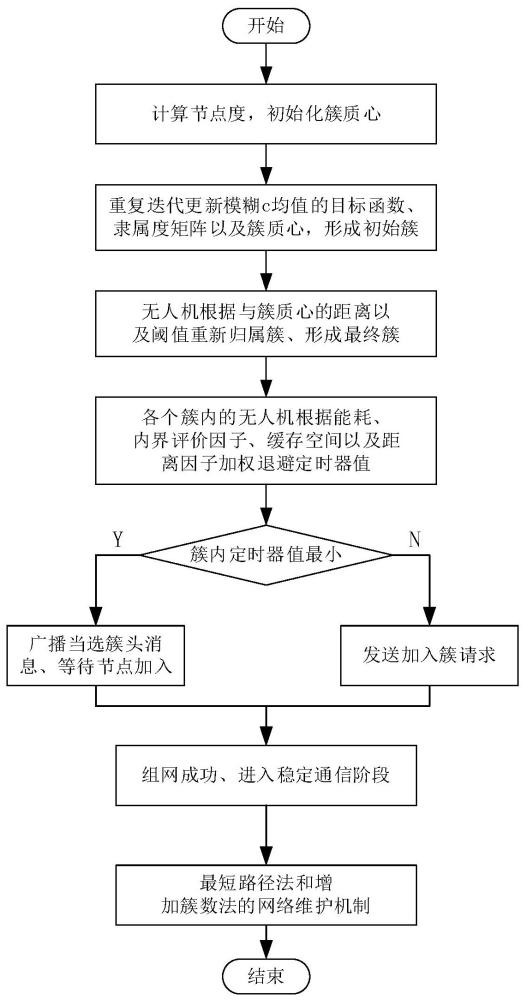
4、s1. 基于无人机集群位置改进模糊c均值算法,并基于改进模糊c均值算法构建均衡网络分簇结构;
5、s2. 基于簇头衡量指标和分布式加权退避定时器机制竞选簇头,所述簇头衡量指标包括能耗、内界评价因子、缓存空间以及节点与各个簇质心的距离因子;
6、s3. 基于最短路径法和增加簇数法维护无人机集群自组网;
7、s4. 基于半实物仿真系统进行无人机集群自组网算法验证。
8、进一步地,步骤s1中:无人机集群包括个无人机,且被分为个簇,每个簇中均包含一个簇头,其中每个无人机均具备数据感知、数据传递以及数据存储的功能,且具备竞争簇头的权利;在作业过程中,所有无人机具备信息表,能够通过定位系统获取全体无人机的实时位置并维护信息表;基于无人机集群位置改进模糊c均值算法包括:在固定半径范围内,利用节点度初始化簇质心,并根据分簇结果利用节点阈值和距离均衡簇内结构。
9、进一步地,步骤s1包括以下子步骤:
10、s101. 每个无人机节点以自身位置为圆心,为半径,计算在圆内的节点度,并根据节点度降序排列;
11、s102. 根据节点度降序排列后,提取个节点附近的点作为初始簇质心,初始簇质心需满足在半径内无其他节点被选为簇质心且节点度最高;
12、s103. 利用模糊c均值算法的目标函数、隶属度公式以及簇质心公式,计算新的目标函数、隶属度矩阵和新簇质心;
13、s104. 重复迭代步骤s103,直到满足迭代条件,形成初始簇;
14、s105. 判断每个簇内无人机个数是否满足阈值条件,其中为个数衡量百分比;若满足,则完成均衡网络分簇结构;若不满足,则执行步骤s106-s108;
15、s106. 以簇质心为参考点,计算各个无人机与参考点的距离,并根据距离升序排列;
16、s107. 根据升序排行后的距离,选择距离最小且位于簇质心半径范围内的无人机加入该簇,且加入该簇的无人机数量应满足集合;
17、s108. 重复步骤s106-s107,直至完成以个簇质心为参考点的无人机归属;在重复步骤s106时,若无人机已完成簇归属,则不参与距离计算;
18、s109. 对于不满足簇归属的无人机,按照初始隶属度归属原来的簇;
19、s110. 根据无人机的位置计算新簇质心,形成最终簇。
20、进一步地,步骤s103中,模糊c均值算法的目标函数、隶属度公式以及簇质心公式分别为:
21、
22、
23、
24、其中,为目标函数,为隶属度,为簇质心;为无人机与簇质心之间的距离,为无人机与簇质心之间的距离,为无人机的坐标,;为模糊指标;
25、进一步地,步骤s110中,根据无人机的位置计算新簇质心的方法包括:
26、
27、其中,为无人机的横坐标,为无人机的纵坐标,为无人机的高度,为无人机所处簇集群的无人机个数。
28、进一步地,步骤s2中,簇头衡量指标中能耗的计算方法包括:
29、若无人机用于通信的初始能量为,利用一阶无线电模型定义无人机转发和接收时的能量消耗为:
30、
31、式中,为无人机节点发送位比特数据包的能耗;为无人机节点接收位比特数据的能耗;为电路运行的能耗;为自由空间传播损耗系数;为多径衰落传播损耗系数;为无人机与无人机之间的距离;为损耗系数选择变量,其表达式为:
32、
33、其中,为距离阈值,即:;
34、故无人机的剩余能耗为:
35、
36、其中,分别为发送和接受的指示变量,即无人机发送数据时,接收数据时。
37、进一步地,步骤s2中,簇头衡量指标中内界评价因子的计算方法包括:
38、当无人机处于高速移动的状态时,以簇质心为参考点,位于参考点通信范围边缘的无人机虽然短时间内能与参考点建立通信链接,但及其容易脱离对方的通信范围,故通过簇质心位置和无人机位置定义内界评价因子,界定易飞出内界的无人机,该内界评价因子表达式为:
39、
40、其中,为无人机与簇质心的距离;内界评价因子越大,表征无人机越不易脱离通信范围。
41、进一步地,步骤s2中,簇头衡量指标中缓存空间的计算方法包括:
42、若每个无人机初始缓存空间均为,接收一个数据包时,无人机的缓存空间将减小,相反无人机发送一个数据包时,无人机的缓存空间将增加;故无人机的剩余缓存空间为:
43、
44、簇头衡量指标中距离因子的计算方法包括:
45、当簇与簇建立通信链接时,能够映射到各个无人机与各个簇质心的距离,故通过无人机与各个簇质心的距离定义距离因子:
46、。
47、进一步地,步骤s2中,分布式加权退避定时器机制包括:
48、若无人机在定时阶段接收来自本簇中无人机节点的广播消息,那么它将取消定时器并成为簇成员节点;如定时器超时未收到其他无人机节点的广播消息,那么它将广播消息并成为簇头;定时器的值,其中为节点目标函数,其表达式为:
49、
50、其中,,,,为介于0和1之间的常数,且,由目标函数函数能够看出,剩余能量越大、缓存空间越多以及内界因子和距离因子越大的无人机被选为簇头的概率越高。
51、进一步地,步骤s3包括:在成簇后,无人机因移动性会脱离原来簇的通信范围,当无人机脱离后,将单播入簇消息请求加入距离自己最近的簇头,若收到簇头同意消息,则加入该簇;若没有收到簇头同意消息,那么它将状态设置为未决,等待下一个周期发出入簇请求;当大量无人机脱离原簇时,说明无人机覆盖范围扩大,无人机之间的距离越远,这时需增加簇头数量,重新进行簇划分以及簇头选择,以维护网络稳定。
52、进一步地,步骤s4中,半实物仿真系统包括半实物仿真管理系统、实时仿真机、飞控计算机、外挂任务计算机和无线通信模块,其中半实物仿真管理系统通过光纤对实时仿真机进行并行管理调度;实时仿真机灌装无人机运动学模型,模拟真实无人机运动;飞控计算机用于执行相关控制,包括无人机状态控制、任务控制和位置控制;外挂任务计算机灌装无人机集群自组网算法;无线通信模块通过网线与外挂任务计算机连接,用于模拟无人机集群间的远程通信。
53、本发明的有益效果在于:
54、(1)本发明充分考虑无人机集群自身特性,满足不同环境中多样性作业需求,以及满足无人机集群簇头选择的性能需求。
55、(2)本发明可有效延长网络生命周期,均衡集群能耗,提高网络稳定性。
56、(3)在半实物仿真系统中,引入硬件设备到无人机自组网算法仿真回路中进行验证,可有效提升算法的可信性与工程适用性以及算法研制质量。
57、综上所述,相比于传统数字仿真无人机集群自组网算法可信低、无法模拟真实环境存在的干扰,网络生命周期短、不稳定等问题,本发明能真实模拟无人机集群自组网的过程,验证无人机集群自组网算法的有效性与工程应用性并且能有效延长网络生命周期,均衡集群能耗,提高网络稳定性。
- 还没有人留言评论。精彩留言会获得点赞!