实时、低能耗抗干扰信息收集方法、装置、设备和介质
本技术涉及通信,尤其涉及一种实时、低能耗抗干扰信息收集方法、装置、设备和介质。
背景技术:
1、随着无人机(unmanned aerial vehicle,uav)辅助的物联网(internet ofthings,iot)网络的迅速普及,实时且低能耗地数据收集是一个关键的问题。此外,uav的视距(line-of-sight,los)通信特性和其他特性也使其更容易受到干扰攻击,导致通信时延和能耗(energy consumption,ec)增加。
2、目前的信息收集方法通过优化uav在每个固定节点之间的轨迹实现最小化上行数据收集链路中的归一化加权信息年龄和。
3、然而,现有的信息收集方法存在能耗较高和实时性、抗干扰性较差的问题。
技术实现思路
1、本技术提供一种实时、低能耗抗干扰信息收集方法、装置、设备和介质,用以解决现有的信息收集方法存在能耗较高和实时性、抗干扰性较差的问题。
2、第一方面,本技术提供一种实时、低能耗抗干扰信息收集方法,方法包括:
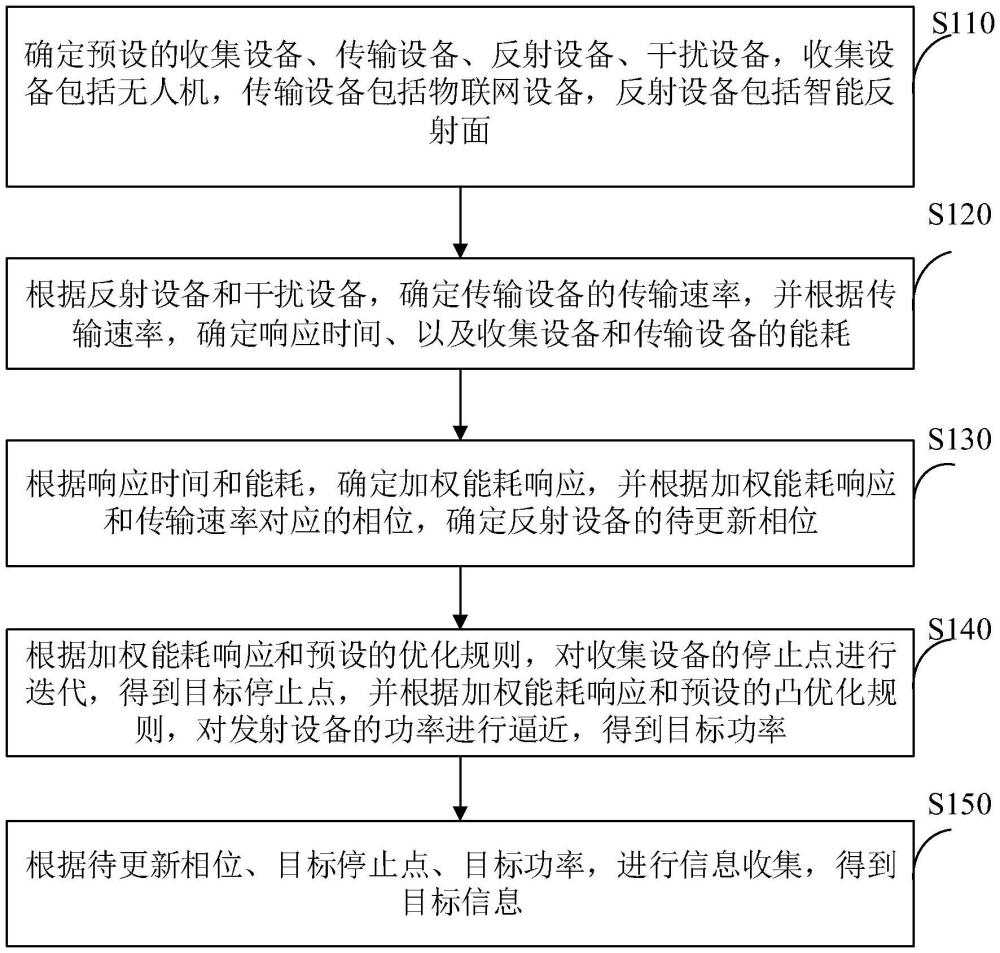
3、确定预设的收集设备、传输设备、反射设备、干扰设备,收集设备包括无人机,传输设备包括物联网设备,反射设备包括智能反射面;
4、根据反射设备和干扰设备,确定传输设备的传输速率,并根据传输速率,确定响应时间、以及收集设备和传输设备的能耗;
5、根据响应时间和能耗,确定加权能耗响应,并根据加权能耗响应和传输速率对应的相位,确定反射设备的待更新相位;
6、根据加权能耗响应和预设的优化规则,对收集设备的停止点进行迭代,得到目标停止点,并根据加权能耗响应和预设的凸优化规则,对发射设备的功率进行逼近,得到目标功率;
7、根据待更新相位、目标停止点、目标功率,进行信息收集,得到目标信息。
8、在本技术实施例中,根据反射设备和干扰设备,确定传输设备的传输速率,并根据传输速率,确定响应时间、以及收集设备和传输设备的能耗,包括:
9、根据收集设备与反射设备的距离,确定两者的第一信道增益,并根据收集设备与传输设备的距离,确定两者的第二信道增益;
10、根据收集设备与干扰设备的距离,确定两者的第三信道增益,并根据反射设备与传输设备的距离,确定两者的第四信道增益;
11、根据第一信道增益和第四信道增益,确定收集设备和传输设备的级联信道增益,并根据级联信道增益、第二信道增益、收集设备对应的通信概率,确定收集设备的信道增益;
12、根据第四信道增益和收集设备的信道增益,确定传输速率;
13、确定收集设备对应的悬停时间和飞行时间、悬停功率和飞行功率;
14、根据悬停时间和飞行时间、悬停功率和飞行功率、传输速率,确定响应时间、收集设备和传输设备的能耗。
15、在本技术实施例中,根据悬停时间和飞行时间、悬停功率和飞行功率、传输速率,确定响应时间、收集设备和传输设备的能耗,包括:
16、确定收集设备的预设停止点数量,并确定收集设备在各个预设停止点的停止点悬停时间、以及各个预设停止点之间的飞行时间;
17、根据停止点悬停时间和飞行时间,确定响应时间;
18、根据悬停时间和悬停功率,确定收集设备的悬停能耗,并根据飞行时间和飞行功率,确定收集设备的飞行能耗;
19、根据传输速率,确定传输设备的传输能耗,并根据收集设备的收集能耗和飞行能耗、以及传输设备的传输能耗,确定收集设备和传输设备的能耗。
20、在本技术实施例中,根据响应时间和能耗,确定加权能耗响应,并根据加权能耗响应和传输速率对应的相位,确定反射设备的待更新相位,包括:
21、将收集设备的停止点确定为预设停止点,并将传输设备的传输功率确定为预设输出功率;
22、根据传输速率对应的相位,确定反射设备对应的对角相移矩阵,并根据预设停止点、预设输出功率、对角相移矩阵,确定加权能耗响应的最小值、以及最小值对应的相位;
23、根据最小值对应的相位,确定对角相移矩阵的目标值,并根据目标值,确定反射设备的待更新相位。
24、在本技术实施例中,根据加权能耗响应和预设的优化规则,对收集设备的停止点进行迭代,得到目标停止点,并根据预设的凸优化规则,对发射设备的功率进行逼近,得到目标功率,包括:
25、确定反射设备的待更新相位,并将传输设备的传输功率确定为预设传输功率;
26、根据待更新相位和预设传输功率,确定收集设备的初始停止点,并根据预设的优化规则,对初始停止点进行迭代,得到收集设备的多组停止点,并确定多组停止点中,对应的加权能耗响应最小的停止点;
27、将对应的加权能耗响应最小的停止点确定为目标停止点,并根据预设的凸优化规则,对发射设备的功率进行逼近,得到目标功率。
28、在本技术实施例中,将对应的加权能耗响应最小的停止点确定为目标停止点,并根据预设的凸优化规则,对发射设备的功率进行逼近,得到目标功率,包括:
29、确定反射设备的待更新相位和目标停止点,并根据待更新相位和目标停止点,确定发射设备的发射功率对应的功率展开式;
30、根据预设的凸优化规则,对发射功率对应的功率展开式进行逼近,得到目标功率。
31、在本技术实施例中,根据待更新相位、目标停止点、目标功率,进行信息收集,得到目标信息,包括:
32、根据目标停止点和目标功率,对待更新相位进行相位调整,得到目标相位;
33、根据目标相位、目标停止点、目标功率,得到目标信息。
34、第二方面,本技术提供一种实时、低能耗抗干扰信息收集装置,装置包括:
35、设备确定模块,用于确定预设的收集设备、传输设备、反射设备、干扰设备,收集设备包括无人机,传输设备包括物联网设备,反射设备包括智能反射面;
36、传输速率和能耗确定模块,用于根据反射设备和干扰设备,确定传输设备的传输速率,并根据传输速率,确定响应时间、以及收集设备和传输设备的能耗;
37、响应和相位确定模块,用于根据响应时间和能耗,确定加权能耗响应,并根据加权能耗响应和传输速率对应的相位,确定反射设备的待更新相位;
38、停止点和功率确定模块,用于根据加权能耗响应和预设的优化规则,对收集设备的停止点进行迭代,得到目标停止点,并根据加权能耗响应和预设的凸优化规则,对发射设备的功率进行逼近,得到目标功率;
39、信息确定模块,用于根据待更新相位、目标停止点、目标功率,进行信息收集,得到目标信息。
40、第三方面,本技术提供一种计算机设备,包括:处理器,以及与处理器通信连接的存储器;
41、存储器存储计算机执行指令;
42、处理器执行存储器存储的计算机执行指令,以实现本技术的方法。
43、第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有程序代码,程序代码被处理器执行时用于实现本技术的方法。
44、本技术提供的实时、低能耗抗干扰信息收集方法、装置、设备和介质,通过确定预设的收集设备、传输设备、反射设备、干扰设备;根据反射设备和干扰设备,确定传输设备的传输速率,并根据传输速率,确定响应时间、以及收集设备和传输设备的能耗;根据响应时间和能耗,确定加权能耗响应,并根据加权能耗响应和传输速率对应的相位,确定反射设备的待更新相位;根据加权能耗响应和预设的优化规则,对收集设备的停止点进行迭代,得到目标停止点,并根据加权能耗响应和预设的凸优化规则,对发射设备的功率进行逼近,得到目标功率;根据待更新相位、目标停止点、目标功率,进行信息收集,得到目标信息。
45、如此,可以通过以uav-iot(internet of things,物联网设备)网络的上行数据收集为研究对象,在恶意干扰情况下,考虑了通过对智能反射面(intelligent reflectivesurfaces,irs)的相位、uav的轨迹和iot设备的发射功率优化来实现抗干扰和信息年龄(age of information,aoi)及能耗(energy consumption,ec)的最小化问题,从而根据最小aoi和最小ec对应的irs相位、uav轨迹、iot设备的发射功率,进行信息收集,提高了信息收集的实时性、低能耗性、抗干扰性。
- 还没有人留言评论。精彩留言会获得点赞!