一种智能化人工增雨防雹火箭作业系统的制作方法
[0001]
本实用新型属于人工降雨领域,具体涉及一种智能化人工增雨防雹火箭作业系统。
背景技术:
[0002]
目前人工影响天气(以下简称“人影”)作业火箭弹和发射架种类繁多,形式各异,越来越复杂,久而久之,逐渐形成了人影装备行业壁垒和局域垄断,不利于整体人影行业的进一步发展。为打破这种局面,整个人影行业对于火箭发射架实现标准化、通用化从而实现弹架分离的讨论由来已久,因种种原因,通用型火箭发射架一直未能落地推广。为打破人影装备弹架一体垄断局面和行业壁垒,需要推进弹架分离、促进人影行业更加快速发展的目标。
[0003]
为解决当前人影作业时遇到的火箭弹和发射架种类繁多、标准不一、体积庞大、重量笨重、安全隐患大,作业效率低等问题为目标,研制一种标准化通用火箭发射架,服务于人影事业。
技术实现要素:
[0004]
本实用新型提供了一种智能化人工增雨防雹火箭作业系统,解决人工降雨的问题。
[0005]
本实用新型所采用的技术方案为:
[0006]
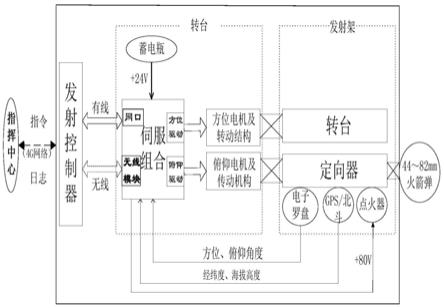
一种智能化人工增雨防雹火箭作业系统,包括发射控制器、发射转台、发射架,所述发射架安装在发射转台上,所述发射控制终端还与指挥中心通信连接;所述转台包括伺服控制器;所述发射控制终端与伺服控制器通信连接;所述伺服控制器总线连接用于调节转台左右转动的方位驱动器以及调节发射架俯仰角度的俯仰驱动器;所述伺服控制器信号连接有位置反馈单元,所述位置反馈单元设置于发射架上。通过无线发射器无线通信连接指挥中心以及发射转台,发射转台作为中间信息接收回馈点,实现信息的闭环控制,实现智能自动人工降雨。
[0007]
进一步的,位置反馈单元包括方向反馈单元以及地理信息反馈单元,所述方向反馈单元为电子罗盘,所述地理信息反馈单元为北斗模块或gps定位模块。
[0008]
进一步的,伺服控制器电连接有用于检测发射架轨道形变量的位移传感器,所述位移传感器位于发射架的轨道上下两侧,且轨道的顶部、中部以及尾部都设置有检测点。通过在轨道的顶部、中部以及尾部都设置有位移传感器检测轨道形变量,当形变量超过预计范围值时,即影响降雨弹的发射,认定为卡弹,实现轨道的自动检测,并通过伺服控制器收集信息传给发射控制器,实现智能故障检测。
[0009]
进一步的,发射架包括多个降雨弹轨道,每个降雨弹轨道都设置有独立的点火器;每个独立的点火器电连接有继电器,所述继电器电连接伺服控制器;每个点火器所连接的继电器都与升压电路电连接,所述升压电路包括依次电连接的可调节电压电路、升压电路、
第二继电器、高压开关以及电源;所述可调节电压电路电连接点火器所连接的继电器;所述第二继电器电连接伺服控制器。
[0010]
进一步的,升压电路的输出端电连接有电压检测传感器,所述电压检测传感器电连接伺服控制器。
[0011]
进一步的,发射控制器包括工业平板,所述工业平板电连接有按键采集板;所述工业平板包括无线模块以及信号接口模块、4g模块、处理器、屏幕以及用于扫码的摄像头模块;所述伺服控制器电连接有无线模块以及信号接口模块;所述工业平板通过4g模块与指挥中心进行通信连接;所述处理器分别与信号接口模块、4g模块以及摄像头模块电连接。通过摄像头可以对降雨弹上的二维码进行扫描,以读取降雨弹的基本信息,识别降雨弹是否合格,实现降雨弹的自动检测功能。
[0012]
进一步的,发射转台通过蓄电池进行供电。
[0013]
进一步的,发射架采用自适应弹道的发射架。采用自适应弹道的发射架可以兼容发射各种型号的火箭弹,实现一架多弹发射,不同弹种能够通过扫描二维码实现一次性操作快速装填。发射架实行自适应弹种定向器、自动控制转台和智能发射控制器设计,作业方便快捷。
[0014]
一种智能化人工增雨防雹火箭作业方法,采用上述智能化人工增雨防雹火箭作业系统,包括以下步骤,采用所述发射控制器扫描降雨弹的二维码判定降雨弹信息,如果信息符合降雨弹可发射的预设标准,则进行装弹,反之则更换降雨弹;当降雨弹信息符合降雨弹可发射的预设标准时,发射控制器将降雨弹规格信号发送给伺服控制器,伺服控制器根据降雨弹规格调整发射架的弹道大小,然后进行装弹;装弹后人员撤离至安全区域,通过发射控制器接收发射转台传来的发射架位置信息、方向以及俯仰角度;调转发射架至目标指向位置;通过发射控制器发送升压信息给伺服控制器;升压完成后,通过发射控制器发送发射信息给伺服控制器完成发射;发射成功后发射控制器生成发射日志发送给指挥中心。
[0015]
本实用新型具有如下的优点和有益效果:
[0016]
1、本实用新型通过无线发射器无线通信连接指挥中心以及发射转台,发射转台作为中间信息接收回馈点,实现信息的闭环控制,实现智能自动人工降雨;
[0017]
2、本实用新型发射架采用自适应弹道的发射架,定向器、自动控制转台和发射控制器设计,作业方便快捷;
[0018]
3、本实用新型本发射架作业系统能够快捷、高效、精准、安全地进行人工增雨防雹作业。
附图说明
[0019]
此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本申请的一部分,并不构成对本实用新型实施例的限定。在附图中:
[0020]
图1是本实用新型发射架作业系统组成框图。
[0021]
图2是本实用新型伺服控制系统组成框图。
[0022]
图3是本实用新型伺服控制系统原理框图。
[0023]
图4是本实用新型点火控制电路原理示意图。
[0024]
图5是本实用新型配电网络示意图。
[0025]
图6是本实用新型发射控制器原理框图。
[0026]
图7是本实用新型具体实施时发射控制器的按键排布图。
具体实施方式
[0027]
为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
[0028]
应当理解,术语第一、第二等仅用于区分描述,而不能理解为指示或暗示相对重要性。尽管本文可以使用术语第一、第二等等来描述各种单元,这些单元不应当受到这些术语的限制。这些术语仅用于区分一个单元和另一个单元。例如可以将第一单元称作第二单元,并且类似地可以将第二单元称作第一单元,同时不脱离本实用新型的示例实施例的范围。
[0029]
应当理解,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,单独存在b,同时存在a和b三种情况,本文中术语“/和”是描述另一种关联对象关系,表示可以存在两种关系,例如,a/和b,可以表示:单独存在a,单独存在a和b 两种情况,另外,本文中字符“/”,一般表示前后关联对象是一种“或”关系。
[0030]
应当理解,在本实用新型的描述中,术语“上”、“竖直”、“内”、“外”等指示的方位或位置关系,是该实用新型产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0031]
应当理解,当将单元称作与另一个单元“连接”、“相连”或“耦合”时,它可以与另一个单元相连接或耦合,或中间单元可以存在。相対地,当将单元称作与另一个单元“直接相连”或“直接耦合”时,不存在中间单元。应当以类似方式来解释用于描述单元之间的关系的其他单词(例如,“在
……
之间”对“直接在
……
之间”,“相邻”对“直接相邻”等等)。
[0032]
在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0033]
本文使用的术语仅用于描述特定实施例,并且不意在限制本实用新型的示例实施例。如本文所使用的,单数形式“一”、“一个”以及“该”意在包括复数形式,除非上下文明确指示相反意思。还应当理解术语“包括”、“包括了”、“包含”、和/或“包含了”当在本文中使用时,指定所声明的特征、整数、步骤、操作、单元和/或组件的存在性,并且不排除一个或多个其他特征、数量、步骤、操作、单元、组件和/或他们的组合存在性或增加。
[0034]
实施例1:
[0035]
如图1、图2所示,本实施例提供了一种智能化人工增雨防雹火箭作业系统,包括发射控制器、发射转台、发射架以及伺服控制系统,所述伺服控制系统包括控制运算处理单元、信号输入单元、状态指示单元、电机驱动单元以及位置反馈单元,控制运算处理单元采
用伺服控制器,电机驱动单元包括方位驱动器以及俯仰驱动器;所述发射架安装在发射转台上,所述发射控制终端还与指挥中心通信连接;所述伺服控制器设置于发射转台内;所述发射控制终端与伺服控制器通信连接;所述伺服控制器总线连接用于调节转台左右转动的方位驱动器以及调节发射架俯仰角度的俯仰驱动器;俯仰电机选择上海优爱宝智能机器人科技公司ui2486-98-5004a步进电机,最大力矩达到4.9nm;方位电机选用上海优爱宝智能机器人科技公司ui2457-56-2804a步进电机,最大力矩达到1.26nm;所述伺服控制器信号连接有位置反馈单元,所述位置反馈单元设置于发射架上。通过无线发射器无线通信连接指挥中心以及发射转台,发射转台作为中间信息接收回馈点,实现信息的闭环控制,实现智能自动人工降雨。
[0036]
具体实施时,如图3所示,位置反馈单元包括方向反馈单元以及地理信息反馈单元,所述方向反馈单元为电子罗盘,所述地理信息反馈单元为北斗模块或gps定位模块。通过北斗模块或gps定位模块实现发射转台的位置定位,当定位在禁射区时,可通过发射控制器显控界面设定禁射区,伺服系统不响应禁射区调转。伺服速度控制采用步进电机开环控制,电子罗盘输出定向器当前角度指向信息,伺服控制器根据系统工作要求,完成对电机的控制,对外数据的输入输出通信等功能。通过gps/北斗定位以及采用无线网络通信实现无线显控,具体实施时兼容有线通信连接方式。具体实施时,可利用步进电机经减速器通过蜗轮蜗杆传动实现发射架俯仰调转,通过步进电机和大减速比的直齿齿轮副进行实现发射架方位调转;在方位和俯仰驱动轴上分别安装有手摇把手,可实现手动调转。选用正点原子的gpsgps/北斗双模定位模块实现火箭弹发射架经纬度、海拔高度的检测。电子罗盘用来测定发射支架的方位、俯仰角度,同时自带角度校准补偿功能。电子罗盘安装位置与发射架发射管成55
°
角,保证在发射架工作角度范围内,电子罗盘的工作角度始终在60度以内以保证电子罗盘精度。选用深圳瑞芬科技公司hcm375b型电子罗盘。
[0037]
具体实施时,伺服控制器电连接有用于检测发射架轨道形变量的位移传感器,具体实施时选用深圳米郎科技有限公司ktc2-mm-sl位移传感器,所述位移传感器位于发射架的轨道上下两侧,且轨道的顶部、中部以及尾部都设置有检测点。通过在轨道的顶部、中部以及尾部都设置有位移传感器检测轨道形变量,当形变量超过预计范围值时,即影响降雨弹的发射,认定为卡弹,实现轨道的自动检测,并通过伺服控制器收集信息传给发射控制器,实现智能故障检测。具体实施时,伺服控制器包括cpu处理模块、接口控制模块、i/o控制模块、电源转换模块、底板等组成。cpu处理模块主要由dsp处理器tms320f28335和 fpga逻辑单元ep2c8t144i8n组成。dsp处理器tms320f28335主要实现处理手持终端控制命令,实现转台调转任务。dsp通过can通信实现负载转速控制。 fpga逻辑单元实现数据输入输出接口处理,以及有关逻辑控制信号处理功能。
[0038]
具体实施时,发射架包括多个降雨弹轨道,每个降雨弹轨道都设置有独立的点火器;每个独立的点火器电连接有继电器,所述继电器电连接伺服控制器;每个点火器所连接的继电器都与升压电路电连接,所述升压电路包括依次电连接的可调节电压电路、升压电路、第二继电器、高压开关以及电源;如图4所示,所述可调节电压电路电连接点火器所连接的继电器;所述第二继电器电连接伺服控制器。通过升压电路上设置的第二继电器且第二继电器电连接伺服控制器,可以通过发射控制器进行远程发送升压指令,伺服控制器通过有线通信或无线通信接收升压指令,对第二继电器进行控制,开启升压电路进行升压;升压
完成后,通过发射控制器发送对应弹道的发送信号,伺服控制器接收信号后控制相应弹道的继电器使得点火器进行点火,实现弹道的独立点火控制,实用性强。具体实施时,发射控制器扫描火箭弹二维码后,伺服系统自动获取火箭弹技术参数并根据自适应弹种点火控制电路给火箭弹配置相应的点火条件 (点火电压、点火电流和点火脉冲持续时间等)。升压电路输出电压为所有火箭弹中所需发射电压最高的,再经可调节电压电路可输出其他弹种所需的发射电压,实现自适应弹种点火条件配置。按下升压按钮后,升压继电器导通,电压检测传感器检测点火电压是否正常并反馈到控制器,一切正常后,分别按四个通道的发射键控制相对应的继电器导通即可实现点火。
[0039]
具体实施时,升压电路的输出端电连接有电压检测传感器,所述电压检测传感器电连接伺服控制器。通过电压检测传感器检测升压电路的电压情况,并将电压情况回馈给伺服控制器,伺服控制器将信号传给发射控制器,实现远程检查是否升压就绪。
[0040]
具体实施时,如图6所示,发射控制器包括工业平板,所述工业平板电连接有按键采集板;所述工业平板包括无线模块以及信号接口模块、4g模块、处理器、屏幕以及用于扫码的摄像头模块;所述伺服控制器电连接有无线模块以及信号接口模块;所述工业平板通过4g模块与指挥中心进行通信连接;所述处理器分别与信号接口模块、4g模块以及摄像头模块电连接。通过摄像头可以对降雨弹上的二维码进行扫描,以读取降雨弹的基本信息,识别降雨弹是否合格,实现降雨弹的自动检测功能,具体实施时,检测内容包括降雨的日期,以判定降雨弹是否为过期弹或问题弹。具体实施时,按照如图7所示进行键盘设计。按键指示灯解释:
[0041]
通道1-4指示灯:火箭弹电阻值正常显示绿色,若超出范围显示红色;
[0042]
欠电指示灯:按键采集板电源指示,绿色正常,熄灭或闪烁表示电源异常;
[0043]
升压指示灯:伺服升压成功时显示绿色,失败时显示红色;
[0044]
发射指示灯:发射正常时显示绿色,不正常显示红色;
[0045]
方位按键:采用四个互斥按键,按下一个按键时另三个自动弹起;高、中、低分别表示在方位面能以高速40
°
/s、中速20
°
/s、低速5
°
/s三种速度调转。
[0046]
俯仰按键:采用三个互斥按键,高、低表示在俯仰面以高速10
°
/s、低速 2.5
°
/s两种速度调转;
[0047]
应急按键:采用两个互斥按键,用于紧急情况时切断或打开系统电源;
[0048]
检测按键:采用自复位键,按下时伺服系统检测4个通道火箭弹的电阻值;
[0049]
升压键:采用自复位键,对点火器进行一键升压;
[0050]
发射键:采用自复位键,执行发射火箭弹发射作业,四个发射通道独立控制。
[0051]
具体实施时,发射转台通过24v的蓄电池进行供电。具体实施如图5所示。
[0052]
具体实施时,发射架采用自适应弹道的发射架。发射架设置有触点式点火器以及接线式点火,适应多种点火方式的降雨弹。
[0053]
具体实施时,自动控制功能包括:
[0054]
1)自动控制发射轨道间距以适应不同弹种;
[0055]
2)自动控制发射架方位/俯仰角度;
[0056]
3)自适应弹种点火控制,伺服系统自动获取火箭弹技术参数并配置相应的点火条件,点火电压、点火电流、点火脉冲持续时间等。
[0057]
实施例2:
[0058]
一种智能化人工增雨防雹火箭作业方法,采用上述智能化人工增雨防雹火箭作业系统,包括以下步骤,采用所述发射控制器扫描降雨弹的二维码判定降雨弹信息,如果信息符合降雨弹可发射的预设标准,则进行装弹,反之则更换降雨弹;当降雨弹信息符合降雨弹可发射的预设标准时,发射控制器将降雨弹规格信号发送给伺服控制器,伺服控制器根据降雨弹规格调整发射架的弹道大小,然后进行装弹;装弹后人员撤离至安全区域,通过发射控制器接收发射转台传来的发射架位置信息、方向以及俯仰角度;调转发射架至目标指向位置;通过发射控制器发送升压信息给伺服控制器;升压完成后,通过发射控制器发送发射信息给伺服控制器完成发射;发射成功后发射控制器生成发射日志发送给指挥中心。
[0059]
具体实施时,扫码功能:扫描弹身二维码自动获取火箭弹型号、弹长、弹径及过期/问题弹等信息。
[0060]
以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1