一种整箭转运起竖系统及方法与流程
1.本发明涉及一种火箭转运、起竖装置,具体涉及一种适用中大型运载火箭整箭水平转运及起竖的系统和方法。
背景技术:
2.在航空航天领域,火箭的测发模式主要有一平两垂模式、三垂模式和三平模式,一平两垂是指水平转运、垂直组装和垂直测试,三垂是指垂直转运、垂直组装和垂直测试,三平是指水平组装、水平测试和水平转运。相对于一平两垂和三垂模式,三平模式下箭体的所有组装和测试工作均在技术厂房内完成,因不受天气影响,组装和测试时间相对确定,且无需高层工装为组装和测试提供支持,降低了对技术厂房的高度要求,具有质心低、效率高、机动性好的优点;整箭水平转运至发射工位后可快速进行起竖,缩短了单发箭体占用靶场时间,有利于提高靶场使用率。对于采用三平模式的整箭转运和起竖,现有技术通常将起竖功能与转运功能集成为一体,增加了设备的复杂性,且对设备支撑强度的要求较高,仅适用小型运载火箭,无法满足中大型运载火箭的整箭水平转运及起竖要求。
技术实现要素:
3.本发明的目的是提供一种整箭转运起竖系统及方法,系统具有结构简单、功能性强、安全性高的优点,实现了功能模块化和结构轻量化目的,可满足三平测发模式下中大型运载火箭的整箭水平转运及起竖要求;方法具有流程简单、执行效率高、安全可靠的优点。
4.为解决现有技术中存在的上述问题,本发明提供的一种整箭转运起竖系统,包括转运车、托架和起竖装置,所述转运车包括底盘和驾驶室,底盘上设有四个呈中心对称分布的调节机构,调节机构包括十字滑台,十字滑台上设有可升降且用于支承托架的支撑柱;所述托架用于承载箭体,托架包括架体以及间隔设置在架体上的前抱锁和后抱锁,前抱锁用于限制箭体横向和垂向运动,后抱锁用于限制箭体纵向、横向和垂向运动;所述起竖装置设置在发射区,起竖装置用于对接托架体并进行起竖。
5.进一步的,本发明一种整箭转运起竖系统,其中,所述起竖装置包括左右对称的两组起竖组件,起竖组件包括起竖架、过渡架、一级起竖油缸和二级起竖油缸,过渡架呈三角形,起竖架的后端和过渡架的后角点与固定在地上的第一支耳铰接,一级起竖油缸的上下端对应与起竖架的前端和过渡架的前角点铰接,二级起竖油缸的上端与过渡架的上角点铰接,二级起竖油缸的下端与固定在地上的第二支耳铰接。
6.进一步的,本发明一种整箭转运起竖系统,其中,所述两组起竖组件的起竖架之间设有横梁,每组起竖组件中的过渡架均设有两个且使其对称分布在一级起竖油缸和二级起竖油缸的两侧。
7.进一步的,本发明一种整箭转运起竖系统,其中,所述起竖装置上设有左定位板、右定位板和后定位板;所述架体上设有左前激光测距仪、左后激光测距仪、右前激光测距仪、右后激光测距仪、正后激光测距仪、左定位块、右定位块和两个后定位块,左定位块、右
定位块和后定位块的底部分别设有发讯装置。
8.进一步的,本发明一种整箭转运起竖系统,还包括分别与左前激光测距仪、左后激光测距仪、右前激光测距仪、右后激光测距仪、正后激光测距仪、发讯装置和调节机构电连接的对接控制器。
9.进一步的,本发明一种整箭转运起竖系统,还包括设置在起竖装置后侧的支承平台,所述支承平台包括台体和设置在台体上的多个可升降的承载柱,承载柱与起竖后的箭体支腿对应设置。
10.进一步的,本发明一种整箭转运起竖系统,其中,所述左前激光测距仪与右前激光测距仪、左后激光测距仪与右后激光测距仪、左定位块与右定位块以及两个后定位块均呈左右对称分布,且使左定位块、右定位块和后定位块设置在架体的同一高度位置。
11.进一步的,本发明一种整箭转运起竖系统,其中,所述底盘包括车架和轮组,所述驾驶室设置在车架的一端且使两者的顶部齐平,所述调节机构设置在车架上,车架上与四个调节机构对应的位置还分别设有用于连接托架的锁紧机构;所述架体在前抱锁的前侧还设有辅助支撑,所述过渡架下侧的地面上设有凹槽,所述第二支耳设置在凹槽中。
12.本发明还提供了一种整箭转运起竖方法,包括以下步骤:
13.s1、在技术区,将托架吊至转运车的四个调节机构上,并通过连接件将架体与底盘连接固定;
14.s2、将整箭水平吊至托架上,并通过前抱锁和后抱锁将箭体固定;
15.s3、转运车由技术区驶至发射区,当转运车到达发射工位后驻车,并解除架体与底盘之间的连接件;
16.s4、调整托架的姿态以与起竖装置对中,对中完成后将两组起竖组件的起竖架与托架连接固定;
17.s5、使两组起竖组件的一级起竖油缸同步伸出,当托架和箭体起竖至α角度时使一级起竖油缸停止动作,α是指箭体与水平面之间的夹角;
18.s6、使两组起竖组件的二级起竖油缸同步伸出,当托架和箭体起竖至90度时使二级起竖油缸停止动作;
19.s7、使支承平台的各承载柱升高,当各承载柱顶实对应的箭体支腿时停止动作,并依次解锁后抱锁和前抱锁;
20.s8、依次回收两组起竖组件的二级起竖油缸和一级起竖油缸,使托架和起竖架回平,至此即完成了整箭的水平转运和起竖。
21.进一步的,本发明一种整箭转运起竖方法,其中,在步骤s4中所述调整托架的姿态以与起竖装置对中,包括以下步骤:
22.s4
‑
1、通过左前激光测距仪检测其与左定位板之间的距离l1,通过左后激光测距仪检测其与左定位板之间的距离l2;
23.s4
‑
2、当l1>l2时,使四个调节机构绕其形心做逆时针圆周转动,直至l1=l2;当l1<l2时,使四个调节机构绕其形心做顺时针圆周转动,直至l1=l2;
24.s4
‑
3、通过右前激光测距仪检测其与右定位板之间的距离l3,通过右后激光测距仪检测其与右定位板之间的距离l4;
25.s4
‑
4、当l1>l3或l2>l4时,使四个调节机构同步向左移动,直至l1=l3或l2=
l4;当l1<l3或l2<l4时,使四个调节机构同步向右移动,直至l1=l3或l2=l4;
26.s4
‑
5、通过正后激光测距仪检测其与后定位板之间的距离d;使四个调节机构同步向后移动,直至d=d,d为预设值;
27.s4
‑
6、使四个调节机构同步下移,直至左定位块、右定位块和两个后定位块上的发讯装置均发讯。
28.本发明一种整箭转运起竖系统及方法与现有技术相比,具有以下优点:本发明通过设置转运车、托架和起竖装置,使转运车设置底盘和驾驶室,在底盘上设置四个呈中心对称分布的调节机构,让调节机构设置十字滑台,并在十字滑台上设置可升降且用于支承托架的支撑柱;托架用于承载箭体,使托架设置架体以及间隔安装在架体上的前抱锁和后抱锁,其中,前抱锁用于限制箭体横向和垂向运动,后抱锁用于限制箭体纵向、横向和垂向运动;将起竖装置设置在发射区,起竖装置用于对接托架体并进行起竖。由此就构成了一种结构简单、功能性强、安全性高的整箭转运起竖系统。在实际应用中,整箭转运起竖的过程如下:一、在技术区,将托架吊至转运车的四个调节机构上,并将托架与底盘连接固定;二、将整箭水平吊至托架上,并通过前抱锁和后抱锁将箭体固定;三、转运车载着托架和箭体由技术区驶至发射区,当转运车到达发射工位后驻车,并解除托架与底盘之间的连接;四、通过四个调节机构调整托架和箭体的姿态,当托架与起竖装置对中后将两者固定在一起;五、通过起竖装置将托架和箭体整体起竖至竖直状态。本发明通过使转运车、托架和起竖装置采用分体式结构,并将起竖装置设置在发射区,一方面实现了功能模块化,有利于转运起竖系统系列化,另一方面实现了转运车的轻量化,提高了转运机动性,且在起竖过程中转运车不参与承载,降低了对转运车的承载要求,提高了系统的起竖能力,可满足中大型运载火箭的整箭水平转运及起竖要求;通过设置四个呈中心对称分布的调节机构,可快速调整托架和箭体的姿态,提高了托架与起竖装置的对接效率。本发明提供的一种整箭转运起竖方法,具有流程简单、执行效率高、安全可靠的优点。
29.下面结合附图所示具体实施方式对本发明一种整箭转运起竖系统及方法作详细说明。
附图说明
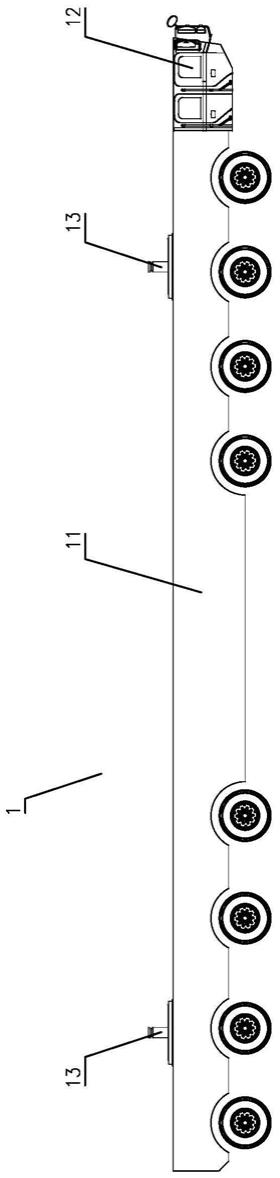
30.图1为本发明一种整箭转运起竖系统中转运车的正视示意图;
31.图2为本发明一种整箭转运起竖系统中转运车的俯视示意图;
32.图3为本发明一种整箭转运起竖系统中托架的正视示意图;
33.图4为本发明一种整箭转运起竖系统中托架的俯视示意图;
34.图5为本发明一种整箭转运起竖系统中起竖装置的正视示意图;
35.图6为本发明一种整箭转运起竖系统中起竖装置的俯视示意图;
36.图7为本发明一种整箭转运起竖系统中支承平台的正视示意图;
37.图8为本发明一种整箭转运起竖系统中支承平台的俯视示意图;
38.图9为整箭转运状态的示意图;
39.图10为托架与起竖装置对中的示意图一;
40.图11为托架与起竖装置对中的示意图二;
41.图12为托架与起竖装置对中的示意图三;
42.图13至图15为起竖的过程示意图。
具体实施方式
43.首先需要说明的,本发明中所述的上、下、左、右、前、后等方位词只是根据附图进行的描述,以便于理解,并非对本发明的技术方案及请求保护范围进行的限制。
44.如图1至图15所示本发明一种整箭转运起竖系统的具体实施方式,包括转运车1、托架2和起竖装置。使转运车1设置底盘11和驾驶室12,在底盘11上设置四个呈中心对称分布的调节机构13,让调节机构13设置十字滑台131,并在十字滑台131上设置可升降且用于支承托架2的支撑柱132。托架2用于承载箭体5,使托架2设置架体21以及间隔安装在架体21上的前抱锁22和后抱锁23,其中,前抱锁22用于限制箭体5横向和垂向运动,后抱锁23用于限制箭体5纵向、横向和垂向运动。将起竖装置设置在发射区,起竖装置用于对接托架体21并进行起竖。
45.通过以上结构设置就构成了一种结构简单、功能性强、安全性高的整箭转运起竖系统。在实际应用中,整箭转运起竖的过程如下:一、在技术区,将托架2吊至转运车1的四个调节机构13上,并将托架2与底盘11连接固定。二、将整箭水平吊至托架2上,并通过前抱锁22和后抱锁23将箭体固定。三、转运车1载着托架2和箭体由技术区驶至发射区,当转运车1到达发射工位后驻车,并解除托架2与底盘11之间的连接。四、通过四个调节机构13调整托架2和箭体的姿态,当托架2与起竖装置对中后将两者固定在一起。五、通过起竖装置将托架2和箭体整体起竖至竖直状态。本发明通过使转运车1、托架2和起竖装置采用分体式结构,并将起竖装置设置在发射区,一方面实现了功能模块化,有利于转运起竖系统系列化,另一方面实现了转运车1的轻量化,提高了转运机动性,且在起竖过程中转运车1不参与承载,降低了对转运车1的承载要求,提高了系统的起竖能力,可满足中大型运载火箭的整箭水平转运及起竖要求;通过设置四个呈中心对称分布的调节机构13,可快速调整托架2和箭体的姿态,提高了托架2与起竖装置的对接效率。需要说明的是,底盘11包括车架和多对轮组,并集成有传动系统、刹车系统和转向系统,以便驾驶和操控。在实际应用中,本发明通常将驾驶室12设置在车架的一端且使两者的顶部齐平,将调节机构13设置在车架上,以节省空间,便于安装承载托架2和箭体。为提高安全性,本发明还在车架上与四个调节机构13对应的位置分别设置了用于连接托架2的锁紧机构14,以便转运时将托架2锁紧固定在车架上。为防止箭体变形受损,本发明通常还在前抱锁22前侧的架体21设置辅助支撑24,以提供垂向支撑力。需要指出的是,前抱锁22、后抱锁23、辅助支撑24和锁紧机构14为现有技术,其结构和工作方式为本领域技术人员所熟知,在此不再赘述。另外,整箭和箭体应作相同概念理解,整箭是指组装后的火箭箭体。
46.作为优化方案,如图5和图6所示,本发明使起竖装置采用了以下结构:设置左右对称的两组起竖组件3,使起竖组件3设置起竖架31、过渡架32、一级起竖油缸33和二级起竖油缸34,其中,过渡架32呈三角形,起竖架31的后端和过渡架32的后角点与固定在地上的第一支耳35铰接,一级起竖油缸33的上下端对应与起竖架31的前端和过渡架32的前角点铰接,二级起竖油缸34的上端与过渡架32的上角点铰接,二级起竖油缸34的下端与固定在地上的第二支耳36铰接。这一结构在起竖时,先让两组起竖组件3的一级起竖油缸33同步伸出,并起竖至一定角度α后停止,然后再让两组起竖组件3的二级起竖油缸34同步伸出,并起竖至
90度停止即可。本发明通过采用这种两级接力起竖结构,可使一级起竖油缸33和二级起竖油缸34均采用单级油缸,在满足起竖总长度的基础上,减小了单缸细长比,降低了工艺难度和制造成本,保证了稳定性,解决了现有技术因采用多级缸产生换级不连续的问题,增强了起竖的平稳性和安全性。同时,本具体实施方式通过在两组起竖组件3的起竖架31之间设置横梁37,提高了结构的稳定性和动作的同步性;通过让每组起竖组件3中的过渡架32均设置两个且使其对称分布在一级起竖油缸33和二级起竖油缸34的两侧,增强了结构和动作的稳定性。为降低高度,提高安全性,本具体实施方式在过渡架32下侧的地面上设置了凹槽38,并将第二支耳36设置在凹槽38中。
47.作为优化方案,如图10和图11所示,本具体实施方式在起竖装置上设置了左定位板301、右定位板302和后定位板303;在架体21上设置了左前激光测距仪211、左后激光测距仪212、右前激光测距仪213、右后激光测距仪214、正后激光测距仪215、左定位块216、右定位块217和两个后定位块218,并在左定位块216、右定位块217和后定位块218的底部分别设置了发讯装置219。由此就形成了感知子系统,通过感知子系统检测的参数控制调节机构13,可快速进行托架2与起竖装置对中。如图10至图12所示,对中过程如下:一、通过左前激光测距仪211检测其与左定位板301之间的距离l1,通过左后激光测距仪212检测其与左定位板301之间的距离l2,当l1>l2时,使四个调节机构13绕其形心同步做逆时针圆周转动,直至l1=l2,当l1<l2时,使四个调节机构13绕其形心同步做顺时针圆周转动,直至l1=l2,由此就实现了托架2偏航角的调整。偏航角是指托架2和起竖装置在水平面的夹角,调整目标是使夹角为零。二、通过右前激光测距仪213检测其与右定位板302之间的距离l3,通过右后激光测距仪214检测其与右定位板302之间的距离l4,当l1>l3或l2>l4时,使四个调节机构13同步向左移动,直至l1=l3或l2=l4,当l1<l3或l2<l4时,使四个调节机构13同步向右移动,直至l1=l3或l2=l4,由此就实现了托架2的横向位置调整,调整目标是使托架2和起竖装置的纵向中心线重合。三、通过正后激光测距仪215检测其与后定位板303之间的距离d,使四个调节机构13同步向后移动,直至d=d,d为预设值,由此就实现了托架2的纵向位置调整,调整目标是使托架2在纵向上处于设定的位置。四、使四个调节机构13同步下移,直至左定位块216、右定位块217和两个后定位块218上的发讯装置219均发讯,由此就实现了托架2的垂向位置调整,调整目标是使托架2的对接面与起竖装置的对接面贴合。通过以上步骤即可实现托架2与起竖装置对中。需要说明的是,在实际应用中,本发明通常使左前激光测距仪211与右前激光测距仪213、左后激光测距仪212与右后激光测距仪214、左定位块216与右定位块217以及两个后定位块218均左右对称设置,且将左定位块216、右定位块217和后定位块218设置在架体21的同一高度位置,以简化结构,提高控制的便利性。为实现对中的自动控制,本发明还设置了分别与左前激光测距仪211、左后激光测距仪212、右前激光测距仪213、右后激光测距仪214、正后激光测距仪215、发讯装置219和调节机构13电连接的对接控制器,通过对接控制器和内置的对中策略即可实现一键对中。
48.作为具体实施方式,如图7和图8所示,本具体实施方式还在起竖装置的后侧设置了支承平台4,以便支承起竖后的箭体5。支承平台4包括台体41和设置在台体41上的多个可升降的承载柱42,其中,承载柱42与起竖后的箭体支腿对应设置。
49.基于同一构思,本发明还提供了一种整箭转运起竖方法,包括以下步骤:
50.s1、在技术区,将托架2吊至转运车1的四个调节机构13上,并通过连接件将架体21
与底盘11连接固定,以保证转运过程中的安全性。
51.s2、将整箭水平吊至托架2上,并通过前抱锁22和后抱锁23将箭体固定。
52.s3、转运车1由技术区驶至发射区,当转运车1到达发射工位后驻车,并解除架体21与底盘11之间的连接件。
53.s4、调整托架2的姿态以与起竖装置对中,对中完成后将两组起竖组件3的起竖架31与托架2连接固定。
54.s5、使两组起竖组件3的一级起竖油缸33同步伸出,当托架2和箭体起竖至α角度时使一级起竖油缸33停止动作,α是指箭体与水平面之间的夹角,应根据实际需要具体确定。
55.s6、使两组起竖组件3的二级起竖油缸34同步伸出,当托架2和箭体起竖至90度时使二级起竖油缸34停止动作。
56.s7、使支承平台4的各承载柱42升高,当各承载柱42顶实对应的箭体支腿时停止动作,并依次解锁后抱锁23和前抱锁22。
57.s8、依次回收两组起竖组件3的二级起竖油缸34和一级起竖油缸33,使托架2和起竖架31回平,至此即完成了整箭的水平转运和起竖。
58.在步骤s4中所述调整托架2的姿态以与起竖装置对中,具体包括以下步骤:
59.s4
‑
1、通过左前激光测距仪211检测其与左定位板301之间的距离l1,并传至对接控制器;通过左后激光测距仪212检测其与左定位板301之间的距离l2,并传至对接控制器。
60.s4
‑
2、当l1>l2时,通过对接控制器使四个调节机构13绕其形心同步做逆时针圆周转动,直至l1=l2;当l1<l2时,通过对接控制器使四个调节机构13绕其形心同步做顺时针圆周转动,直至l1=l2。
61.s4
‑
3、通过右前激光测距仪213检测其与右定位板302之间的距离l3,并传至对接控制器;通过右后激光测距仪214检测其与右定位板302之间的距离l4,并传至对接控制器。
62.s4
‑
4、当l1>l3或l2>l4时,通过对接控制器使四个调节机构13同步向左移动,直至l1=l3或l2=l4;当l1<l3或l2<l4时,通过对接控制器使四个调节机构13同步向右移动,直至l1=l3或l2=l4。
63.s4
‑
5、通过正后激光测距仪215检测其与后定位板303之间的距离d,并传至对接控制器;通过对接控制器使四个调节机构13同步向后移动,直至d=d,d为预设值,应根据实际需要具体确定。
64.s4
‑
6、通过对接控制器使四个调节机构13同步下移,直至左定位块216、右定位块217和两个后定位块218上的发讯装置219均发讯。
65.本发明提供的整箭转运起竖方法具有流程简单、执行效率高、安全可靠的优点。
66.以上实施例仅是对本发明的优选实施方式进行的描述,并非对本发明请求保护范围进行限定,在不脱离本发明设计构思的前提下,本领域技术人员依据本发明的技术方案做出的各种变形,均应落入本发明的权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1