智能型水田翻地耙浆埋茬综合整地机的制作方法
1.本实用新型涉及农用机械领域,特别涉及一种智能型水田翻地耙浆埋茬综合整地机。
背景技术:
2.整地(site preparation)是指作物播种或移栽前进行的一系列土壤耕作措施的总称,整地的主要作业包括浅耕灭茬、翻耕、深松耕、耙地、耢地、镇压、平地、耖田、起垄、作畦等。
3.目前,市场上的圆盘驱动犁和打浆机都是单独作业的农业机器。当需要进行旱地或水田整地时,往往需要务农人员分别购买圆盘驱动犁和打浆机两种机器进行翻整田地以及水田打浆,如此一来,容易产生较大的资金成本。
技术实现要素:
4.为克服上述背景技术中存在的问题,本实用新型提供了一种智能型水田翻地耙浆埋茬综合整地机,能够更换成圆盘犁状态进行犁地,还可以更换成打浆机状态进行水田打浆,节省了用户购买农机的花销。
5.本实用新型的技术方案是:
6.一种智能型水田翻地耙浆埋茬综合整地机,包括架体和三角悬挂装置,所述架体上分别安装有用于翻地、水田打浆和埋茬的整地装置以及用于传动所述整地装置转动的传动装置,所述整地装置与所述传动装置可拆卸连接。
7.优选的,所述传动装置包括传动箱和对称设置在所述传动箱两侧的犁臂部;
8.每个所述犁臂部均包括一个侧板,每个所述侧板上均安装有一个侧传动箱,所述传动箱与所述侧传动箱之间设有用于改变犁臂部角度的万向关节轴,且所述传动箱通过所述万向关节轴传动所述侧传动箱转动;
9.所述侧传动箱包括箱体、第一齿轮、第二齿轮和第三齿轮,所述第一齿轮和第三齿轮分别与所述第二齿轮啮合;
10.所述万向关节轴包括万向关节和传动轴,所述万向关节的外部设有互相铰接的第一套筒和第二套筒,所述传动轴的外部设有活动半管,所述第二套筒固定在所述传动箱的侧端,所述活动半管的一端与所述第一套筒连接,另一端与所述侧板连接,所述传动轴靠近所述侧板的一端与所述第一齿轮可拆卸连接;
11.所述整地装置包括一对翻地刀轴,每个所述翻地刀轴上均匀设有多个圆盘犁刀,每个所述翻地刀轴的一端与所述第三齿轮可拆卸连接,另一端与所述活动半管可拆卸连接;
12.其中,所述活动半管与所述架体之间设有可调节长度的拉杆,所述拉杆的端部分别与所述活动半管和架体铰接。
13.优选的,所述第一齿轮和第三齿轮均具有中心通孔,所述第一齿轮套装在所述传
动轴靠近所述侧板的一端;
14.每个所述侧板上分别转动安装有一个联动轴,所述联动轴的一端设有第一安装盘,所述第三齿轮的套装在所述联动轴的另一端;
15.所述翻地刀轴的一端设有第二安装盘,所述第二安装盘与第一安装盘通过螺栓固定;
16.所述活动半管上安装有上连接架,所述翻地刀轴的另一端转动安装有下连接架,所述上连接架与下连接架通过螺栓固定;
17.其中,所述传动轴靠近所述侧板的一端和所述联动轴远离第一安装盘的一端的周向均设有多个键,所述第一齿轮和第三齿轮的中心通孔上设有多个键槽。
18.优选的,所述拉杆包括螺母管,所述螺母管的两端分别螺接有一个螺杆,其中一个所述螺杆的端部与所述活动半管铰接,另一个所述螺杆的端部与所述架体铰接。
19.优选的,所述传动箱的底部安装有中间传动箱,所述中间传动箱内设有链轮i和链轮ii,所述链轮i和链轮ii通过链条连接;
20.其中,所述传动箱用于传动所述链轮i转动,所述链轮ii具有两个向所述中间传动箱外部延伸的动力输出轴,每个所述动力输出轴的端部安装有一个所述圆盘犁刀。
21.优选的,所述整地装置包括打浆刀轴和埋茬刀轴,所述打浆刀轴的两端分别设有一个第三安装盘,所述埋茬刀轴的两端分别设有一个第四安装盘;
22.所述第三安装盘与第一安装盘通过螺栓固定;
23.每个所述侧板上分别转动安装有一个第一链轮,其中一个所述传动轴靠近所述侧板的一端安装有一个第二链轮,所述第二链轮具有中心通孔,所述第二链轮的中心通孔与所述第一齿轮的中心通孔结构相同,所述第二链轮套装在该端的所述传动轴上,且该所述第二链轮通过链条与同侧的第一链轮连接;
24.其中,每个所述第一链轮均具有输出轴,所述输出轴的一端穿过该侧的所述侧板向另一侧的所述侧板延伸,且所述输出轴的延伸端设有第五安装盘,所述第四安装盘与第五安装盘通过螺栓固定。
25.优选的,该智能型水田翻地耙浆埋茬综合整地机,包括平衡调节系统,所述平衡调节系统包括主控制盒、液压换向阀、两个液压缸以及安装在架体上的角度传感器;所述主控制盒与拖拉机电源连接,所述角度传感器和液压换向阀分别与主控制盒电连接,两个所述液压缸均与所述液压换向阀连接;
26.所述三角悬挂装置包括对称固定于架体上的左连接臂和右连接臂;所述左连接臂和右连接臂的末端分别销接一个调节臂,每个所述调节臂的末端与拖拉机活动连接,且每个所述液压缸安装在一个所述调节臂上,每个所述液压缸与拖拉机活动连接。
27.与现有技术相比,本实用新型的有益效果是:本实用新型能够根据实际的农耕需求
28.进行圆盘驱动犁和打浆机之间的更换。需要耕翻地时,将打浆刀轴和埋茬刀轴拆下,然后装上翻地刀轴和中间犁刀总成,就可以进行翻整田地;需要水田打浆时,将翻地刀轴和中间犁刀总成拆下,然后装上打浆刀轴和埋茬刀轴,就可以进行水田打浆。如此设计,不仅大大方便了用户,还降低了购买农机的成本,节省了资金。
附图说明
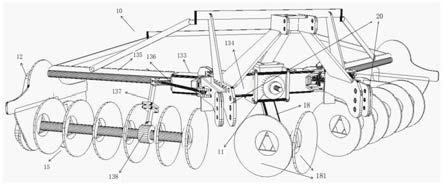
29.图1为本实用新型组装成圆盘犁的示意图;
30.图2为本实用新型的万向关节轴结构图;
31.图3为圆盘犁状态下,翻地刀轴分离状态示意图和安装后的状态示意图;
32.图4为拉杆结构示意图;
33.图5为本实用新型组装成打浆机的示意图;
34.图6为打浆机状态下,打浆刀轴的安装示意图;
35.图7为打浆机状态下,埋茬刀轴的安装示意图;
36.图8为第一安装盘或第二安装盘或第三安装盘或第四安装盘或第五安装盘的结构图;
37.图9为圆盘犁或打浆机与拖拉机连接的简易示意图。
38.附图标记说明:10
‑
架体,11
‑
传动箱,12
‑
侧传动箱,121
‑
第一齿轮,122
‑
第二齿轮,123
‑
第三齿轮,124
‑
联动轴,125
‑
第一安装盘, 126
‑
第二安装盘,127
‑
螺栓,13
‑
万向关节轴,131
‑
万向关节,132
‑
传动轴,133
‑
第一套筒,134
‑
第二套筒,135
‑
活动半管,136
‑
拉杆, 1361
‑
螺母管,1362
‑
螺杆,137
‑
上连接架,138
‑
下连接架,14
‑
第一链轮,141
‑
第二链轮,142
‑
链条,143
‑
第三安装盘,144
‑
第四安装盘 145
‑
第五安装盘,15
‑
翻地刀轴,16
‑
打浆刀轴,17
‑
埋茬刀轴,18
‑
中间传动箱,181
‑
圆盘犁刀,20
‑
三角悬挂装置,21
‑
左连接臂,22
‑
右连接臂,23
‑
调节臂,24
‑
液压缸,30
‑
拖拉机。
具体实施方式
39.下面结合本实用新型中的附图,对本实用新型实施例的技术方案进行清楚、完整的描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本实用新型保护的范围。
40.实施例
41.如图1
‑
8所示,本实用新型提供的一种智能型水田翻地耙浆埋茬综合整地机,包括包括架体10和三角悬挂装置20,架体10上分别安装有用于翻地、水田打浆和埋茬的整地装置以及用于传动整地装置转动的传动装置,整地装置与传动装置可拆卸连接。
42.在本实施例中,本实用新型可以具有两种组装形态。具体为:需要翻地时,本实用新型可以组装成翻地用的圆盘犁;需要水田打浆、埋茬时,本实用新型可以组装成水田打浆、埋茬的打浆机。
43.1、圆盘犁形态的具体结构如下:
44.传动装置包括传动箱11和对称设置在传动箱11两侧的犁臂部;每个犁臂部均包括一个侧板,每个侧板上均安装有一个侧传动箱12,传动箱11与侧传动箱12之间设有用于改变犁臂部角度的万向关节轴13,且传动箱11通过万向关节轴13传动侧传动箱12转动;侧传动箱12包括箱体、第一齿轮121、第二齿轮122和第三齿轮123,第一齿轮121和第三齿轮123分别与第二齿轮122啮合。
45.参考图2,万向关节轴13包括万向关节131和传动轴132,万向关节131的外部设有互相铰接的第一套筒133和第二套筒134,传动轴132的外部设有活动半管135,第二套筒134
固定在传动箱11 的侧端,活动半管135的一端与第一套筒133连接,另一端与侧板连接,传动轴132靠近侧板的一端与第一齿轮121可拆卸连接;
46.整地装置包括一对翻地刀轴15,每个翻地刀轴15上均匀设有多个圆盘犁刀181,每个翻地刀轴15的一端与第三齿轮123可拆卸连接,另一端与活动半管135可拆卸连接;其中,活动半管135与架体10之间设有可调节长度的拉杆136,拉杆136的端部分别与活动半管135和架体10铰接。
47.具体的,第一齿轮121和第三齿轮123均具有中心通孔,第一齿轮121套装在传动轴132靠近侧板的一端;每个侧板上分别转动安装有一个联动轴124,联动轴124一端设有第一安装盘125,第三齿轮123的套装在联动轴124的另一端;翻地刀轴15的一端设有第二安装盘126,第二安装盘126与第一安装盘125通过螺栓127固定;活动半管135上安装有上连接架137,翻地刀轴15的另一端转动安装有下连接架138,上连接架137与下连接架138通过螺栓127 固定。
48.另外,传动箱11的底部安装有中间传动箱18,中间传动箱18 内设有链轮i和链轮ii,链轮i和链轮ii通过链条142连接;传动箱 11用于传动链轮i转动,链轮ii具有两个向中间传动箱18外部延伸的动力输出轴,每个动力输出轴的端部安装有一个圆盘犁刀181,中间传动箱18转动时,会带动链轮i转动,进而通过链轮i带动链轮ii转动,实现安装在动力输出轴上的圆盘犁刀181转动。
49.进一步的,传动轴132靠近侧板的一端和联动轴124远离第一安装盘125的一端的周向均设有多个键,第一齿轮121和第三齿轮 123的中心通孔上设有多个键槽。其中,传动轴132的端部设置的多个键与第一齿轮121和第三齿轮123的中心通孔上设置多个键槽匹配,键与键槽的配合可以对套装在其上的第一齿轮121和第三齿轮 123的进行限位,以及使得第一齿轮121和第三齿轮123保持良好的转动效果。
50.参考图4,拉杆136包括螺母管1361,螺母管1361的两端分别螺接有一个螺杆1362,其中一个螺杆1362的端部与活动半管135铰接,另一个螺杆1362的端部与架体10铰接。其中,转动螺母管 1361时,可以改变螺杆1362裸露出的长度,从而实现拉杆136的伸缩。
51.参考图3,圆盘犁的具体安装操作过程为:
52.第一、调节拉杆136,将拉杆136逐渐缩短,使得活动半管135 与第二套筒134之间形成一定的夹角活动半管135与第二套筒134 之间形成一端的夹角可以根据实际需求设定,然后保持拉杆136不动。
53.第二、将每个翻地刀轴15端部的第二安装盘126靠近并与第一安装盘125的位置对应,然后用螺栓127将第二安装盘126靠与第一安装盘125连接在一起;然后,将翻地刀轴15另一端的下连接架 138与活动半管135上的上连接架137位置对应后,再用螺栓127将下连接架138与上连接架137进行固定;
54.第三、将中间传动箱18通过螺栓127安装在传动箱11的底部,从而完成圆盘犁的安装,如图1所示。
55.其中,打浆机通过三角悬挂装置20与拖拉机30连接;拖拉机 30作为圆盘犁的动力源,驱动传动箱11转动,从而使得圆盘犁运作。
56.2、打浆机形态的具体结构如下:
57.具体的,整地装置包括打浆刀轴16和埋茬刀轴17,打浆刀轴 16的两端分别设有一
个第三安装盘143,埋茬刀轴17的两端分别设有一个第四安装盘144;第三安装盘143与第一安装盘125通过螺栓 127固定;每个侧板上分别转动安装有一个第一链轮14,其中一个传动轴132靠近侧板的一端安装有一个第二链轮141,第二链轮141 具有中心通孔,第二链轮141的中心通孔与第一齿轮121的中心通孔结构相同,第二链轮141套装在该端的传动轴132上,且该第二链轮141通过链条142与同侧的第一链轮14连接;其中,每个第一链轮14均具有输出轴,输出轴的一端穿过该侧的侧板向另一侧的侧板延伸,且输出轴的延伸端设有第五安装盘145,第四安装盘144与第五安装盘145通过螺栓127固定。
58.参考图6和图7,打浆机的具体安装操作过程为:
59.第一、分别先将翻地刀轴15和中间犁刀总成18拆卸下来,然后再将其中一侧的侧传动箱12的箱体开,然后依次拆卸下该侧的第一齿轮121、第二齿轮122和第三齿轮123。
60.第二、调节拉杆136,将拉杆136逐渐伸长,使得活动半管135 与第二套筒134位于一体直线上,然后保持拉杆136不动。
61.第三、将第二链轮141安装在该侧传动轴132上(也就是第一齿轮121之前的安装位置),然后将链条142安装在第二链轮141 和第一链轮14上。
62.第四、将打浆刀轴16两端的第三安装盘143与第一安装盘125 位置进行对应,并用螺栓127进行固定;然后将埋茬刀轴17两端的第四安装盘144与第五安装盘145的位置进行对应,并用螺栓127 进行固定,从而完成打浆机的安装,如图5所示。
63.其中,第一安装盘125或第二安装盘126或第三安装盘143或第四安装盘144或第五安装盘145的结构可参考图8。打浆机安装时,打浆刀轴16需安装在在埋茬轴17的前面;打浆机通过三角悬挂装置20与拖拉机30连接;拖拉机30作为打浆机的动力源,驱动传动箱11转动,从而使得打浆机运作。
64.如图9所示,该智能型水田翻地耙浆埋茬综合整地机,包括平衡调节系统,平衡调节系统包括主控制盒、液压换向阀、两个液压缸24以及安装在架体10上的角度传感器;主控制盒与拖拉机30电源连接,角度传感器和液压换向阀分别与主控制盒电连接,两个液压缸24均与液压换向阀连接;三角悬挂装置20包括对称固定于架体10上的左连接臂和右连接臂;左连接臂和右连接臂的末端分别销接一个调节臂21,每个调节臂21的末端与拖拉机30活动连接,且每个液压缸24安装在一个调节臂21上,每个液压缸24与拖拉机30 活动连接。
65.具体的,拖拉机30电源为平衡调节系统供电,角度传感器安装在架体10上,也就是安装在圆盘犁或打浆机上,角度传感器用于检测圆盘犁或打浆机在工作时的工作角度(可以理解为检测圆盘犁或打浆机是否与地面保持水平)。主控制盒可以是微电脑全自动智能平衡控制仪等能够控制角度传感器和液压换向阀的设备。
66.其中,角度传感器和液压换向阀均具有不同的型号,技术员可以根据技术方案进行选型,这里未具体给出。图9为圆盘犁或打浆机与拖拉机连接的简易示意图,图中的三角悬挂装置20的其他结构未画出。
67.在拖拉机30带动圆盘犁或打浆机工作时,由于田地不平整,导致拖拉机30会向低处倾斜,从而也导致圆盘犁或打浆机倾斜。工作时,当拖拉机30车身向左边倾斜时(拖拉机30车身左边低),圆盘犁或打浆机上的角度传感器检测到其工作角度发生变化,将采集的信号发生给主控制盒,主控制盒对接收的信号进行处理,并发出控制指令,从而控制液压换向阀工作,进而通过液压换向阀控制两个液压缸相对进行伸缩,从而将左连接臂和右连接臂
的角度调整到相对水平的状态,即将圆盘犁或打浆机工作角度的调整到正常的状态。例如圆盘犁或打浆机左边低时,则左边的液压缸会上升,右边的液压缸对应会下降,直至调节圆盘犁或打浆机的工作角度恢复水平状态;圆盘犁或打浆机右边低时,则右边的液压缸会上升,左边的液压缸对应会下降,直至调节圆盘犁或打浆机的工作角度恢复水平状态。
68.以上公开的仅为本实用新型的较佳的具体实施例,但是,本实用新型实施例并非局限于此,任何本领域技术人员能思之的变化都应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1