一种自动寻迹喂料车的制作方法
1.本发明涉及喂料车技术领域,尤其涉及一种自动寻迹喂料车。
背景技术:
2.目前,许多养殖户或者养殖场生产设施十分简陋,机械化较低;大多由中小型养殖用户仍在采用人工喂料,劳动强度大,喂料时间长,上料不均匀,容易漏料,堆料,造成料的浪费。
3.为降低劳动量,现有技术中也出现了一些喂料车,但是现有的喂料车前期行走机构都为导轨式,普遍存在着:自动化程度太低、流量不足、造价高、投资大、需要路面铺设导轨和对作业现场行走路面的条件要求高等缺陷。还有一些饲料饲喂车都是大吨位的运输车,主要应用于各大中型养殖企业从外部向场内的饲料运输,但是由于吨位大、占用空间大、中转不灵活,不适合在中小型养殖企业内部的比较狭小空间内饲料的转运,仍然需要人工在场内进行饲料转运,存在的问题是,结构紧凑,转运工作人员工作劳动强度大、效率低,而且容易造成饲料污染。
4.所以,需要设计一种喂料车来解决以上的技术问题。
技术实现要素:
5.针对现有技术中的技术问题,本发明提供一种自动寻迹喂料车。
6.一种自动寻迹喂料车,包括:行走支撑机构,位于行走支撑机构上且底部开设出料口的料斗,安装在料斗底部且位于出料口旁侧的草料输送机构,安装在出料口下方的下料机构,以及与行走支撑机构、草料输送机构、下料机构均电连接的主控机构和供电机构,其中,
7.行走支撑机构包括料斗安装架,安装在料斗安装架下面的主动行走组件和从动行走组件,主动行走组件和从动行走组件平行设置,主动行走组件上安装有第一驱动电机组件以及转向电机组件;
8.草料输送机构包括相对设置的第一支撑板、第二支撑板,以及安装在第一支撑板、第二支撑板之间的第一输送组件和第二输送组件,第一输送组件和第二输送组件分别安装在出料口的左侧和右侧;第一输送组件传动连接有第一输送电机组件,第二输送组件传动连接有第二输送电机组件;
9.下料机构包括传送电机组件以及传送带组件,传送带组件的传送方向与第一输送组件的输送方向相垂直;
10.主控机构包括第一驱动电机控制电路、送料控制电路、转向电机控制电路;第一驱动电机控制电路与第一驱动电机组件连接;送料控制电路与第一输送电机组件、第二输送电机组件以及传送电机组件连接;转向电机控制电路与转向电机组件连接;
11.供电机构与第一驱动电机控制电路、送料控制电路、转向电机控制电路均连接。
12.本发明的自动寻迹喂料车,通过草料输送机构、下料机构结合送料控制电路实现
自动放料,将开料口开设在第一输送组件和第二输送组件之间,可以减少草料在料斗内的输送距离,从而节约电能;行走支撑机构结合第一驱动电机控制电路可直接按照预设的时间和路径实现喂料车的自动行走。自动寻迹喂料车整体实现了定时、定点放料,具备非常高的自动化程度,整个车体的结构设计合理、紧凑,适用于小型养殖场的场内饲料投放,节约了人力物力,具备非常高的推广价值。
附图说明
13.为了更清楚的说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
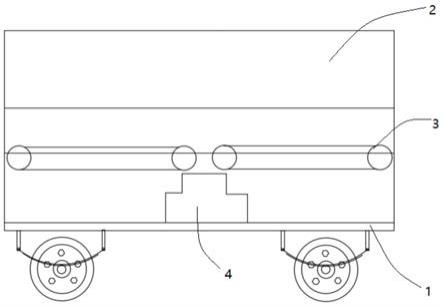
14.图1为本发明实施例的一种自动寻迹喂料车的结构示意图;
15.图2为本发明实施例的一种自动寻迹喂料车的部分结构示意图(一);
16.图3为本发明实施例的一种自动寻迹喂料车的部分结构示意图(二);
17.图4为本发明实施例的一种自动寻迹喂料车的部分结构示意图(三);
18.图5为本发明实施例的一种自动寻迹喂料车的部分结构示意图(四);
19.图6为本发明实施例的一种自动寻迹喂料车中主控机构的部分电路示意图(一);
20.图7为本发明实施例的一种自动寻迹喂料车中主控机构的部分电路示意图(二);
21.图8为本发明实施例的一种自动寻迹喂料车中主控机构的部分电路示意图(三);
22.图9为本发明实施例的一种自动寻迹喂料车中主控机构的部分电路示意图(四);
23.其中:1
‑
行走支撑机构、11
‑
料斗安装架、12
‑
主动行走组件、121
‑
第一滚轮、122
‑
第二滚轮、123
‑
第一连接轴、124
‑
第一板簧、125
‑
第二板簧、13
‑
从动行走组件、131
‑
第三滚轮、132
‑
第四滚轮、133
‑
第二连接轴、134
‑
第三板簧、135
‑
第四板簧、14
‑
第一驱动电机组件、2
‑
料斗、3
‑
草料输送机构、31
‑
第一支撑板、32
‑
第二支撑板、33
‑
第一输送组件、331
‑
第一输送电机组件、332
‑
第一传动轴、333
‑
第二传动轴、334
‑
第一链轮、335
‑
第二链轮、336
‑
第三链轮、337
‑
第四链轮、338
‑
第一链条、339
‑
第二链条、34
‑
第二输送组件、341
‑
第二输送电机组件、342
‑
第三传动轴、343
‑
第四传动轴、344
‑
第五链轮、345
‑
第六链轮、346
‑
第七链轮、347
‑
第八链轮、348
‑
第三链条、349
‑
第四链条、35
‑
刮板、4
‑
下料机构、41
‑
传送电机组件、42
‑
传送带组件、5
‑
距离检测机构、51
‑
支撑框架、52
‑
升降皮带、53
‑
升降电机组件、54
‑
接近开关、55
‑
开关安装架。
具体实施方式
24.下面将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通的技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明的保护范围。
25.如图1至图5所示,本发明实施例的一种自动寻迹喂料车,包括:行走支撑机构1,位于行走支撑机构1上且底部开设出料口的料斗2,安装在料斗2底部且位于出料口旁侧的草料输送机构3,安装在出料口下方的下料机构4,以及与行走支撑机构1、草料输送机构3、下
料机构4均电连接的主控机构和供电机构。
26.其中,行走支撑机构1包括料斗安装架11,安装在料斗安装架11下面的主动行走组件12和从动行走组件13,主动行走组件12和从动行走组件13平行设置,主动行走组件12上安装有第一驱动电机组件14以及转向电机组件。本实施例优选的设置有两个转向电机组件,安装在从动行走组件13上,分别实现行走支撑机构1的向左、向右转向。
27.草料输送机构3包括相对设置的第一支撑板31、第二支撑板32,以及安装在第一支撑板31、第二支撑板32之间的第一输送组件33和第二输送组件34,第一输送组件33和第二输送组件34分别安装在出料口的左侧和右侧;第一输送组件33传动连接有第一输送电机组件331,第二输送组件34传动连接有第二输送电机组件341;下料机构4包括传送电机组件41以及传送带组件42,传送带组件42的传送方向与第一输送组件33的输送方向相垂直。第一输送组件33和第二输送组件34分别位于出料口的左右两侧,分别将乘于料斗内的草料自两边向中间出料口位置输送,材料从出料口出落下后。落在传送带组件上,传送电机组件41转动将草料向前输送落入料槽中,实现自动填料。
28.主控机构包括第一驱动电机控制电路、送料控制电路、转向电机控制电路;第一驱动电机控制电路与第一驱动电机组件14电连接;送料控制电路与第一输送电机组件331、第二输送电机组件332以及传送电机组件41电连接;转向电机控制电路与转向电机组件连接。第一驱动电机控制电路用于控制第一驱动电机组件14向前行驶或倒退,以及控制第一驱动电机组件14的转速,继而实现对自动寻迹喂料车的行驶速度的控制。送料控制电路控制第一输送电机组件331、第二输送电机组件332以及传送电机组件41的运动状态,实现对送料过程的控制。转向电机控制电路用于控制转向电机组件的工作状态,可根据预设路线对自动寻迹喂料车的行驶方向进行调节。
29.供电机构与第一驱动电机控制电路、送料控制电路、转向电机控制电路均连接,实现对整个自动寻迹喂料车的工作供电。具体的,如图5所示,本发明实施例的自动寻迹喂料车还包括距离检测机构5,距离检测机构包括支撑框架51、升降皮带52、升降电机组件53、接近开关54以及开关安装架55,其中,支撑框架51安装在料斗安装架11的下方;升降皮带52竖向设置在支撑框架51上,且与升降电机组件53传动连接;接近开关54安装于开关安装架55上,且开关安装架55安装于升降皮带52上;接近开关54与第一驱动电机控制电路电连接。本实施例中的接近开关54通过升降电机组件53的作用实现升降,用于检测与地面之间的距离,作为一个自动寻迹喂料车行驶的考量因素。
30.需要说明的是,本实施例中的第一驱动电机组件14、转向电机组件、第一输送电机组件331、第二输送电机组件341、传送电机组件41、升降电机组件53等均应当包括有对应的电机产品以及驱动该电机的驱动电路,本领域技术人员在实施本方案时,根据所选用的电机的产品型号来对应匹配驱动电路即可,本实施例对此不作具体的限定。
31.具体的,供电机构包括供电电池、电压转换模块以及电流检测模块,其中,供电电池通过电压转换模块与第一驱动电机组件14、转向电机组件、第一输送电机组件331、第二输送电机组件341、传送电机组件41、升降电机组件53、接近开关54、第一驱动电机控制电路、送料控制电路以及转向电机控制电路电连接。电流检测模块输入端与供电电池连接,输出端与第一驱动电机控制电路电连接。第一驱动电机控制电路可以根据电流检测模块的输出值确定供电电池的电量,便于在电量过低时停止送料而返回到出发点位置,进行充电后
再进行送料。
32.具体的,如图6所示,第一驱动电机控制电路包括控制芯片u01、电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、电阻r8、电阻r9、电阻r10、电阻r11、电阻r12、场效应管q1、场效应管q2、场效应管q3、场效应管q4、场效应管q5、场效应管q6、二极管d1以及二极管d2,其中,
33.控制芯片u01的vcc+端接入vcc12v电压,vcc
‑
端接地,in+端、in2+端、in3+端、in4+端与电流检测端连接,in1
‑
端与电阻r2的滑动端连接,in2
‑
端与电阻r3的滑动端连接,in3
‑
端与电阻r4的滑动端连接,in4
‑
端与电阻r1的滑动端连接,out1端与二极管d1的正极连接,out2端与二极管d2的正极连接,out1端与电阻r5的第一端连接;
34.电阻r5的第二端与场效应管q1的基极连接;场效应管q1的集电极接地,场效应管q1的发射极连接电阻r6的第一端;电阻r6的第二端与第一驱动电机组件连接;
35.电阻r1、电阻r2、电阻r3、电阻r4的第一端均接入vcc12v电压,电阻r1、电阻r2、电阻r3、电阻r4的第二端均接地;
36.二极管d1的负极连接电阻r10的第一端,电阻r10的第二端连接场效应管q4的基极,场效应管q4的发射极接地,场效应管q4的集电极与电阻r12的第一端连接;二极管d2的负极连接电阻r11的第一端,电阻r11的第二端连接场效应管q5的基极,场效应管q5的集电极与场效应管q6的基极连接,场效应管q5的发射极接地;电阻r12的第二端与场效应管q6的基极连接,场效应管q6的集电极接收刹车信号,场效应管q6的发射极接地;电阻r8的第一端接入vcc12v电压,电阻r8的第二端与电阻r9的第一端、场效应管q4的集电极连接;电阻r9的第二端与场效应管q2的基极连接;场效应管q2的发射极接地,场效应管q2的集电极与场效应管q3的基极连接;场效应管q3的发射极接地,场效应管q3的发射极接收刹车信号;电阻r7的第一端接入vcc12v电压,电阻r7的第二端与场效应管q3的基极连接。
37.具体的,如图7所示,送料控制电路包括振荡延时芯片u02、振荡延时芯片u03、振荡延时芯片u04、电阻r13、电阻r14、电阻r15、电阻r16、电阻r17、电阻r18、电阻r19、电阻r20、电阻r21、电阻r22、电阻r23、电阻r24、电阻r25、电阻r26、电阻r27、二极管d3、二极管d4、二极管d5、二极管d6、二极管d7、二极管d8、场效应管q7、场效应管q8、场效应管q9、场效应管q10、场效应管q11、场效应管q12、场效应管q13、场效应管q14、场效应管q15、场效应管q16、场效应管q17、电容c1、电容c2、电容c3、电容c4、电容c5、电容c6、电容c7、电容c8,其中,
38.振荡延时芯片u02的vcc端、rst端接入vcc12v电压,disch端连接电容c2的第一端,trig端和thres端连接,cont端与电容c1的第一端连接,out端与电阻r15的第一端连接,gnd端接地;电容c1的第二端接地;电容c2的第二端接入vcc12v电压;电阻r15的第二端与场效应管q7的基极连接,场效应管q7的集电极接地,场效应管q7的发射极与电阻r16的第一端连接,电阻r16的第二端与场效应管q8的基极连接,场效应管q8的集电极接入vcc12v电压,场效应管q8的发射极连接第一输送电机组件和第二输送电机组件;电阻r14的第一端接入vcc12v电压,电阻r14的第二端与振荡延时芯片u02的trig端连接;
39.电阻r13的第一端与振荡延时芯片u02的trig端连接,电阻r13的第二端与二极管d3、二极管d4的负极连接;二极管d4的正极与出料开关连接;二极管d3的正极与二极管d7的负极连接;二极管d7的正极与电阻r26的第一端连接;电阻r26的第二端与场效应管q16的基极连接;场效应管q16的集电极接入vcc12v电压,场效应管q16的发射极与电阻r25的第一端
连接;电阻r25的第二端接地;场效应管q15的集电极接入vcc12v电压,场效应管q15的基极与电阻r25的第一端连接,场效应管q15的发射极与振荡延时芯片u04的trig端连接;
40.振荡延时芯片u03的vcc端、rst端与场效应管q10的发射极连接,disch端连接电容c3的第一端,trig端和thres端连接,cont端与电容c4的第一端连接,out端与电阻r21的第一端连接,gnd端接地;电容c3的第二端与振荡延时芯片u03的vcc端连接;电容c4的第二端接地;电阻r21的第二端连接场效应管q12的基极;场效应管q12的发射极和集电极均接地;电容c5的第一端与振荡延时芯片u03的trig端连接,电容c5的第二端接地;场效应管q10的基极与电阻r18的第一端以及场效应管q11的发射极连接,场效应管q10的集电极接入vcc12v电压;场效应管q11的集电极接入vcc12v电压,场效应管q11的基极与电阻r17的第一端连接;电阻r18的第二端接地;电阻r17的第二端与二极管d5的正极连接;二极管d5的负极与出料开关连接;
41.振荡延时芯片u04的vcc端、rst端接入vcc12v电压,disch端连接电容c8的第一端,trig端和thres端连接,cont端与电容c6的第一端连接,out端与电阻r22的第一端、电阻r23的第一端连接,gnd端接地;电容c8的第二端接入vcc12v电压;电容c6的第二端接地;电阻r22的第二端与场效应管q14的基极连接;场效应管q14的集电极和发射极均接地;电阻r23的第二端与场效应管q13的基极连接;场效应管q13的集电极接地,场效应管q13的发射极与二极管d6的负极连接;二极管d6的正极与电阻r19的第一端连接;电阻r19的第二端连接场效应管q9的基极;场效应管q9的集电极接入vcc12v电压,场效应管q9的发射极连接电阻r20的第二端以及滑动端;电阻r20的第一端与场效应管q10的发射极连接;电阻r24的第一端接地,电阻r24的第二端与滑动端连接,且与振荡延时芯片u04的trig端连接;电容c7的正极接入vcc12v电压,电容c7的负极与振荡延时芯片u04的trig端连接;
42.场效应管q17的集电极接入vcc24v电压,场效应管q17的基极连接电阻r27的第一端,场效应管q17的发射极连接传送电机组件;电阻r27的第二端与二极管d8的正极连接;二极管d8的负极与出料开关连接。
43.具体的,如图8所示,转向电机控制电路包括振荡延时芯片u201、振荡延时芯片u202、场效应管q201、场效应管q202、场效应管q203、场效应管q204、场效应管q205、场效应管q206、场效应管q207、场效应管q208、场效应管q209、场效应管q210、场效应管q211、场效应管q212、场效应管q213、场效应管q214、场效应管q215、场效应管q216、电阻r201、电阻r202、电阻r203、电阻r204、电阻r205、电阻r206、电阻r207、电阻r208、电阻r209、电阻r210、电阻r211、电阻r212、电阻r213、电阻r214、电阻r215、电阻r216、电阻r217、电阻r218、电阻r219、电阻r220、电阻r221、电阻r222、电容c201、电容c202、电容c203、电容c204、电容c205以及电容c206,其中,
44.振荡延时芯片u201的vcc端、rst端与电阻r201的第一端、电阻r203的第一端连接,disch端连接二极管d203的正极以及二极管d204的负极,trig端和thres端连接,cont端与电容c206的第一端连接,out端与电阻r202的第一端连接,gnd端接地;电容c206的第二端接地;电容c201的第一端与振荡延时芯片u201的trig端连接,电容c201的第二端接地;电阻r201的第二端连接场效应管q201的集电极;场效应管q201的发射极接地,场效应管q201的基极与二极管d201的负极连接;二极管d201的正极与转向限位开关连接;场效应管q202的基极与场效应管q201的集电极连接,场效应管q202的发射极接地,场效应管q202的集电极
与转向电机组件连接,以及与二极管d202的正极连接;二极管d202的负极与电阻r202的第二端连接;电阻r203的第二端与振荡延时芯片u201的disch端连接;二极管d203的负极与电阻r205的第一端连接;电阻r205的第二端与电阻r206的第一端连接,电阻r205的滑动端与振荡延时芯片u201的trig端连接;电容d204的正极与电阻r204的第一端连接,电阻r204的第二端与电阻r206的第一端以及振荡延时芯片u201的vcc端连接;
45.二极管d208的正极与转向限位开关连接,二极管d208的负极与场效应管q203的基极连接;场效应管q203的发射极接地,场效应管q203的集电极与电阻r206的第二端连接;场效应管q204的基极与场效应管q203的集电极连接,场效应管q204的集电极与转向电机组件连接,以及与二极管d205的正极连接,场效应管q204的发射极接地;二极管d205的负极与电阻r207的第一端连接;
46.振荡延时芯片u202的vcc端、rst端与电阻r201的第一端、电阻r208的第一端连接,disch端连接二极管d206的正极以及二极管d207的负极,trig端和thres端连接,cont端与电容c202的第一端连接,out端与电阻r207的第二端连接,gnd端接地;电容c202的第二端接地;电容c203的第一端与振荡延时芯片u202的trig端连接,电容c203的第二端接地;二极管d206的负极与电阻r2010的第一端连接;电阻r210的第二端与电阻r209的第一端连接,电阻r210的滑动端与振荡延时芯片u201的trig端连接;电阻r09的第二端与二极管d207的正极连接;电阻r208的第二端与二极管d207的负极连接;
47.场效应管q205的发射极、场效应管q210的发射极、场效应管q211的发射极与场效应管q216的发射极均与转向电机组件连接;场效应管q205的集电极与场效应管q206的集电极、场效应管q207的集电极、场效应管q208的集电极、场效应管q209的集电极、场效应管q210的集电极、场效应管q211的集电极、场效应管q212的集电极、场效应管q213的集电极、场效应管q214的集电极、场效应管q215的集电极、场效应管q216的集电极相连接并接地;场效应管q205的基极与电阻r211的第一端以及场效应管q206的发射极连接;场效应管q206的基极与电阻r212的第一端连接;电阻r212的第二端与二极管d209的正极以及场效应管q207的发射极连接,并输出第一回舵信号;场效应管q207的基极与电阻r213的第一端连接;r213的第二端与二极管d210的正极、场效应管q208的发射极连接,并输出第二回舵信号;场效应管q208的基极与电阻r214的第一端连接,电阻r214的第二端与场效应管q207的发射极连接;场效应管q209的基极与电阻r215的第一端连接,电阻r215的第二端与场效应管q208的发射极连接;场效应管q209的发射极与电阻r216的第一端以及场效应管q210的基极连接;电阻r211的第二端与电容c205的正极、二极管d209的负极、二极管d210的负极以及电阻r216的第二端连接;电容c205的负极接地;
48.场效应管q211的基极与电阻r217的第一端以及场效应管q212的发射极连接;场效应管q212的基极与电阻r218的第一端连接;电阻r218的第二端与电阻r220的第二端、二极管d211的正极连接;场效应管q213的发射极输出第三回舵信号,场效应管q213的基极与电阻r219的第一端连接,电阻r219的第二端与二极管d212的正极、场效应管q214的发射极连接;场效应管q214的基极与电阻r220的第一端连接,场效应管q214的发射极输出第四回舵信号;场效应管q215的基极与电阻r221的第一端连接,电阻r221的第二端与场效应管q214的发射极连接;场效应管q215的发射极与电阻r222的第一端以及场效应管q216的基极连接;电阻r217的第二端与电容c204的正极、二极管d211的负极、二极管d212的负极以及电阻
r222的第二端连接;电容c204的负极接地。
49.本实施例为了保护转向电机组件的动作在设定范围之内,设置了转向限位开关,当转向电机组件动作时达到转向限位开关所检测的位置,则本实施例中的转向电机控制电路产生回舵信号,便于转向电机组件动作归位。前述实施例提到本发明设计两个转向电机组件,分别实现喂料车向左转以及向右转的目的,则会发生四种状态,包括左转、左转回中、右转、右转回中,在这四个运动状态中,若转向限位开关检测到信号,则转向电机组件根据对应的回舵信号进行响应。
50.具体的,如图9所示,主控机构还包括雷达检测电路,雷达检测电路包括单片机u301、单片机u302、电阻r301、电阻r302、电阻r303、电阻r304以及电容c301,其中,
51.单片机u301和单片机u302的正极接入端接入vcc12v电压,单片机u301和单片机u302的负极接入端接地;
52.单片机u301的正极输入端与电阻r304的第一端连接,单片机u301的负极输入端与电阻r303的第一端连接,单片机u301的输出端与电阻r304的第二端连接;
53.单片机u302的正极输入端与电阻r302的第一端以及滑动端连接,单片机u301的负极输入端与电阻r301的滑动端连接,单片机u301的输出端与电阻r304的第一端连接;电阻r301的第一端接地,电阻r301的第二端接入vcc12v电压;电阻r302的第二端与雷达模块连接;电容c301的正极与单片机u302的正极输入端连接,电容c301的负极接地。
54.雷达模块用于发射和接收电磁波,所检测的信号用以判断发射方向是否有障碍物,雷达检测电路所输出的信号可用于第一驱动电机控制电路对第一驱动电机组件的控制,使喂料车能够及时停车或者倒退,以及用于转向电机控制电路对转向电机组件的控制,使喂料车进行转向,从而更改行驶线路,防止与障碍物发生碰撞。
55.本发明实施例对以上第一驱动电机控制电路、送料控制电路、转向电机控制电路等中的电气元件型号均不作具体的限定,本领域技术人员自行设定即可,同时,本实施例也不对振荡延时芯片输出的周期性信号进行限定,本领域技术人员根据实际使用情况进行设定即可。本实施例中的vcc12v、vcc24v等均通过供电机构进行供电。
56.本实施例中的第一驱动电机控制电路、送料控制电路、转向电机控制电路等均采用小体积的电气元件进行设计,电路的导通与截止均通过场效应管或者开关实现,未采用继电器来实现相关功能,这样不仅缩小了实体电线路板的尺寸,便于安装,还降低了这部分产品的造价,降低了喂料机的制造成本,更加有利于推广使用。
57.具体的,如图5所示,主动行走组件12包括第一滚轮121、第二滚轮122、第一连接轴123、第一板簧124、第二板簧125,从动行走组件13包括第三滚轮131、第四滚轮132、第二连接轴133、第三板簧134、第四板簧135,其中,第一滚轮121和第二滚轮122分别安装于第一连接轴123的两端;第三滚轮131和第四滚轮132分别安装于第二连接轴133的两端;第一板簧124和第二板簧125与第一连接轴123垂直设置,第一板簧124靠近第一滚轮121且其中间位置与第一连接轴123转动连接,第二板簧125靠近第二滚轮122且其中间位置与第一连接轴123转动连接;第一板簧124的两端连接在料斗安装架11上;第二板簧125的两端连接在料斗安装架11上;第一驱动电机组件14安装在第一连接轴123上;第三板簧134和第四板簧135与第二连接轴133垂直设置,第三板簧134靠近第三滚轮131且其中间位置与第二连接轴133转动连接,第四板簧135靠近第四滚轮132且其中间位置与第二连接轴133转动连接;第三板簧
134的两端连接在料斗安装架11上;第四板簧135的两端连接在料斗安装架11上。
58.优选的,本发明实施例中的两个转向电机组件均包括有电机之外,还包括有传动结构,例如一端与电机连接的推杆,电机动作带动推杆在第二连接轴的径向方向发生向前或向后的运动,而两个转向电机组件的推杆的前端分别于第三滚轮131和第四滚轮132连接,从而推杆在电机的带动下将第三滚轮131和第四滚轮132的方向进行调整,之后在第一驱动电机组件14的动作下实现整个喂料机的转向行驶。本实施例中转向电机组件还可通过气缸和推杆的结构实现,本实施例不做具体的限定。此处为了实现第三滚轮131和第四滚轮132相对于第二连接轴的转动,本实施例采用端杆关节轴承实现三者之间的连接。
59.具体的,如图2和图3所示,第一输送组件33包括相对设置的第一链轮组、第二链轮组,第一传动轴332、第二传动轴333以及若干个平行设置且两端安装在第一链轮组和第二链轮组上的刮板35,第一链轮组靠近第一支撑板31安装,第二链轮组靠近第二支撑板32安装,第一传动轴332和第二传动轴333平行设置,且两端与第一支撑板31、第二支撑板32转动连接,第一输送电机组件331与第二传动轴333传动连接,其中,
60.第一链轮组包括第一链轮334、第二链轮335、第三链轮336、第四链轮337、第一链条338以及第二链条339;第一链轮334与第二链轮335通过第一链条338连接,第三链轮336和第四链轮337通过第二链条339连接;第一链轮与第三链轮位置正对,且第一传动轴的两端和第一链轮、第三链轮固定连接;第二链轮与第四链轮位置正对,且第二传动轴的两端和第二链轮、第四链轮固定连接。
61.具体的,如图2和图3所示,第二输送组件34包括相对设置的第三链轮组、第四链轮组,第三传动轴342、第四传动轴343以及若干个平行设置且两端安装在第三链轮组和第四链轮组上的刮板35,第三链轮组靠近第一支撑板31安装,第四链轮组靠近第二支撑板32安装,第三传动轴342和第四传动轴343平行设置,且两端与第一支撑板31、第二支撑板32转动连接,第二输送电机组件与第三传动轴传动连接,其中,
62.第三链轮组包括第五链轮344、第六链轮345、第七链轮346、第八链轮347、第三链条348以及第四链条349;第五链轮344与第六链轮345通过第三链条348连接,第七链轮346和第八链轮347通过第四链条349连接;第五链轮344与第七链轮346位置正对,且第三传动轴342的两端和第五链轮344、第七链轮346固定连接;第六链轮345与第八链轮347位置正对,且第四传动轴343的两端和第六链轮345、第八链轮347固定连接。
63.本发明实施例的自动寻迹喂料车,通过草料输送机构、下料机构结合送料控制电路实现自动放料,将开料口开设在第一输送组件和第二输送组件之间,可以减少草料在料斗内的输送距离,从而节约电能;行走支撑机构结合第一驱动电机控制电路可直接按照预设的时间和路径实现喂料车的自动行走。本发明实施例自动寻迹喂料车实现了定时、定点放料,具备非常高的自动化程度,整个车体的结构设计合理、紧凑,适用于小型养殖场的场内饲料投放,节约了人力物力,具备非常高的推广价值。
64.以上借助具体实施例对本发明做了进一步描述,但是应该理解的是,这里具体的描述,不应理解为对本发明的实质和范围的限定,本领域内的普通技术人员在阅读本说明书后对上述实施例做出的各种修改,都属于本发明所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1