一种远程无人自动种植养护设备的制作方法
[0001]
本实用新型涉及智能自动化农业设备领域,具体涉及一种远程无人自动种植养护设备。
背景技术:
[0002]
目前播种方式主要有人工播种和农机播种,人工播种费时费力,农机播种效率较高,但是也需要人工现场操作,农机也不适用于大棚等种植场所。浇水设备同样分为人工操作浇水以及布设管道进行浇水,人工操作浇水费时费力,但是浇水时需要整块田地浇水,无法选择性浇水,而且管道布置好后不可随意改动,受限较大。除草多为人工除草或打除草剂,植物生长期间杂草会伴随生长,不进行除草会严重影响植物生长,人工除草费时费力且复发性很强,除草效果不佳。以上问题导致在种植方面,智能化程度低,人工劳动量大,费时费力且效果不佳的问题。
技术实现要素:
[0003]
本实用新型的目的是提供一种远程无人自动种植养护设备,以减少在种植方面人工的参与度,提高效率,实现智能自动化对田地进行种植养护。
[0004]
为实现上述目的,本实用新型的一种远程无人自动种植养护设备采用如下技术方案:一种远程无人自动种植养护设备,包括安装架,安装架包括水平导轨,水平导轨上沿其长度方向通过第一滑动盘导向移动安装有龙门架,水平导轨上或龙门架上设置有驱动龙门架导向移动的第一驱动机构;龙门架的横梁上沿其长度方向通过第二滑动盘导向移动安装有竖向杆,横梁上或竖向杆上设置有驱动第二滑动盘导向移动的第二驱动机构;竖向杆上下导向安装于第二滑动盘上,竖向杆上设置有驱动竖向杆上下导向移动的第三驱动机构;竖向杆下端设置有通用工具头,该远程无人自动种植养护设备包括除草工具头、浇水工具头、湿度测量工具头、种子吸取工具头中的至少一种,通用工具头与其他工具头之间设置有吸附结构或者通用工具头与其他工具头之间设置有可拆插接配合的连接结构;龙门架上设置有电控箱,电控箱内设置有控制器用于控制各驱动机构动作。
[0005]
所述吸附结构包括设置于通用工具头壳体上的第一磁铁和设置于其他工具头壳体上的第二磁铁。
[0006]
该远程无人自动种植养护设备包括种子吸取工具头,通用工具头壳体上设置有气嘴,竖向杆上设置有真空泵,真空泵与控制器连接,真空泵通过气管与气嘴连接,种子吸取工具头壳体上设置有气嘴对接孔,气嘴对接孔中连接有种子吸取管。
[0007]
该远程无人自动种植养护设备包括除草工具头,除草工具头壳体上设置有除草刀具。
[0008]
该远程无人自动种植养护设备包括浇水工具头,浇水工具头壳体内具有腔体,腔体的上侧面设置有进水口,腔体的下侧面上设置有多孔板,通用工具头壳体上设置有与进水口对应的水嘴,竖向杆上设置有与水嘴连接的水管,水管上设置有电磁阀,电磁阀与控制
器连接。
[0009]
该远程无人自动种植养护设备包括湿度测量工具头,湿度测量工具头壳体上设置有湿度传感器和与湿度传感器的导线连接的导电柱,通用工具头壳体上设置有与导电柱对应的弹性导电探针,弹性导电探针通过线缆与控制器连接。
[0010]
所述第一滑动盘上设置有与水平导轨导向配合的至少两个第一导向轮,第一驱动机构包括沿水平导轨的长度方向设置的第一传动带,龙门架上设置有第一电机,第一电机的电机轴上设置有第一主动轮,第一主动轮与第一导向轮之间通过第一传动带进行传动实现第一滑动盘的导向移动。
[0011]
所述第二活动盘上设置有与龙门架的横梁导向移动配合的至少两个第二导向轮,第二驱动机构包括沿横梁长度方向设置有第二传动带,第二活动盘上设置有第二电机,第二电机的电机轴上设置有第二主动轮,第二主动轮与第二导向轮之间通过第二传动带进行传动实现第二滑动盘的导向移动。
[0012]
所述第三驱动机构包括设置于竖向杆上的第三电机,第三电机的电机轴上传动连接有丝杠,第二滑动盘上设置有安装块,丝杠螺纹安装于安装块上。
[0013]
所述竖向杆上设置有摄像机,摄像机与控制器连接。
[0014]
本实用新型的有益效果:通过第一驱动机构、第二驱动机构和第三驱动机构可以实现在x、y、z三个方向上的移动,实现通用工具头的位置调节,通用工具头通过吸附结构或连接结构带动不同的工具头实现不同的功能,例如吸取种子进行种植、浇水、土壤的湿度测量以及除草等工作。通过控制器可以控制各驱动机构动作,而且控制器的设置也便于实现远程控制,用户可以通过手机或电脑进行远程操控,实现了远程智能化和自动化管理,降低了人工参与度,且大大提高了工作的效率。
附图说明
[0015]
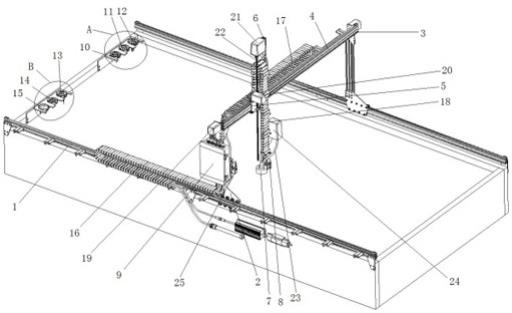
图1是本实用新型的一种远程无人自动种植养护设备的一个实施例的结构示意图一;
[0016]
图2是图1中a处的局部放大图;
[0017]
图3是图1中b处的局部放大图;
[0018]
图4是本实用新型的一种远程无人自动种植养护设备的一个实施例的结构示意图二;
[0019]
图5是图4中c处的局部放大图;
[0020]
图6是是本实用新型的一种远程无人自动种植养护设备的一个实施例的结构示意图三;
[0021]
图7是图6中d处的局部放大图;
[0022]
图8是通用工具头的结构示意图;
[0023]
图9是第一放置架的结构示意图;
[0024]
图10是第二放置架的结构示意图。
具体实施方式
[0025]
本实用新型的一种远程无人自动种植养护设备的实施例,如图1-图10所示,包括
安装架,安装架包括水平导轨1,水平导轨1上沿其长度方向通过第一滑动盘2导向移动安装有龙门架3,龙门架3上设置有驱动龙门架导向移动的第一驱动机构。第一滑动盘2上设置有与水平导轨1导向配合的多个第一导向轮37,第一驱动机构包括沿水平导轨的长度方向设置的第一传动带36,龙门架上设置有第一电机19,第一电机19的电机轴上设置有第一主动轮,第一主动轮与第一导向轮之间通过第一传动带进行传动实现第一滑动盘的导向移动。水平导轨与第一滑动盘之间设置有第一拖链16。本实施例中水平导轨的数量为两个并沿龙门架横梁的长度方向平行间隔设置,相应地第一滑动盘的数量也为两个,第一驱动机构的数量也为两个。
[0026]
龙门架的横梁4上沿其长度方向通过第二滑动盘5导向移动安装有竖向杆6,横梁4上设置有驱动第二滑动盘导向移动的第二驱动机构。第二活动盘上设置有与龙门架的横梁导向移动配合的多个第二导向轮39,第二驱动机构包括沿横梁长度方向设置有第二传动带38,第二活动盘上设置有第二电机20,第二电机的电机轴上设置有第二主动轮,第二主动轮与第二导向轮之间通过第二传动带进行传动实现第二滑动盘的导向移动。龙门架的横梁与第二活动盘之间设置有第二拖链17。
[0027]
竖向杆6上下导向安装于第二滑动盘5上,竖向杆6上设置有驱动竖向杆上下导向移动的第三驱动机构。第三驱动机构包括设置于竖向杆上的第三电机21,第三电机的电机轴上传动连接有丝杠22,第二滑动盘上设置有安装块,丝杠螺纹安装于安装块上。竖向杆与第二滑动盘之间设置有第三拖链18。
[0028]
竖向杆下端设置有通用工具头7,该远程无人自动种植养护设备包括除草工具头10、浇水工具头11、湿度测量工具头12和种子吸取工具头13。通用工具头7与其他工具头之间设置有吸附结构以实现通用工具头能够吸起和放下其他工具头。吸附结构包括设置于通用工具头壳体上的第一磁铁42和设置于其他工具头壳体上的第二磁铁25。龙门架上设置有电控箱9,电控箱9内设置有控制器用于控制各驱动机构动作。竖向杆上设置有摄像机8,摄像机8与控制器连接。
[0029]
本实施例中安装架还包括第一放置架28和第二放置架32,第一放置架28供除草工具头10、浇水工具头11、湿度测量工具头12放置,第二放置架32供种子吸取工具头13放置,其中第二放置架上还放置有种子盒15和种子托盘14。除草工具头、浇水工具头、湿度测量工具头放置以及吸取工具头放置、种子盒、种子托盘六个部件的各自壳体上均相对设置有凹槽26,第一放置架和第二放置架上均设置有供相应部件水平放置的放置槽,各放置槽的槽沿27用于与上述六个部件壳体上的凹槽导向配合且上下限位支撑配合。
[0030]
通用工具头包括壳体,通用工具头壳体上设置有气嘴40,竖向杆上设置有真空泵24,真空泵24与控制器连接,真空泵通过气管23与气嘴40连接,种子吸取工具头壳体上设置有气嘴对接孔33,气嘴对接孔33中连接有种子吸取管34。除草工具头包括壳体,除草工具头壳体上设置有除草刀具30,本实施例中除草刀具的数量为4个。浇水工具头包括壳体,浇水工具头壳体内具有腔体,腔体的上侧面设置有进水口31,腔体的下侧面上设置有多孔板45,通用工具头壳体上设置有与进水口对应的水嘴41,竖向杆上设置有与水嘴连接的水管35,水管35上设置有电磁阀25,电磁阀与控制器连接。湿度测量工具头包括壳体,湿度测量工具头壳体上设置有湿度传感器29和与湿度传感器的导线连接的导电柱44,通用工具头壳体上设置有与导电柱对应的弹性导电探针43,弹性导电探针通过线缆与控制器连接。
[0031]
在使用时,通过第一驱动机构、第二驱动机构和第三驱动机构可以实现在x、y、z三个方向上的移动,实现通用工具头的位置调节。当需要种子种植时,移动通用工具头至种子吸取工具头上方,下移通用工具头,通过磁铁与种子吸取工具头吸附在一起,此时通用工具头上的气嘴与下方种子吸取工具头上的气嘴对接孔对接,水平移出种子吸取工具头,可以吸取种子盒或种子托盘内的种子并移动至相应位置进行种植,种植完成后放回种子吸取工具头。当需要除草时,移动通用工具头至除草工具头上方,下移通用工具头,通过磁铁与除草工具头吸附在一起,水平移出,移动至需要除草的地方进行除草,除草结束后放回除草工具头。当需要浇水时,移动通用工具头至浇水工具头上方,下移通用工具头,通过磁铁与浇水工具头吸附在一起,此时水嘴对准下方浇水工具头上的进水口,水平移出,至需要浇水的地方,由控制器通过电磁阀控制出水及停止以及水量大小的调节,浇水结束后放回浇水工具头。当需要测量土壤湿度时,移动通用工具头至湿度测量工具头上方,下移通用工具头,通过磁铁与湿度测量工具头吸附在一起,此时通用工具头上的弹性导电探针与下方湿度测量工具头上的相应导电柱接触导电,水平移出湿度测量工具头至相应地方,下移使湿度传感其插入土壤中,停留相应时间,由控制器控制通电及断电,湿度数据传至控制器进行储存,通过控制器可远程传至手机或电脑上实时显示。
[0032]
在本实用新型的其他实施例中,第一导向轮的数量可根据实际需要进行调整,可以为两个,此时第一主动轮位于两个第一导向轮之间即第一传动带依次穿过一个第一导向轮、第一主动轮和另外一个第一导向轮;第二导向轮的数量也可根据实际需要进行调整,可以为两个,此时第二主动轮位于两个第二导向轮之间即第二传动带依次穿过一个第二导向轮、第二主动轮和另外一个第二导向轮;吸附结构也可以由插接结构代替,插接结构可以为设置于通用工具头上的插住和设置于其他工具头上的插孔;也可以只设置除草工具头、浇水工具头、湿度测量工具头和种子吸取工具头中的其中一个,或者只设置以上四个工具头中的任意两个或者任意三个;第一驱动机构可以为设置于水平轨道上的丝杠螺母机构;第二驱动机构也可以为设置于龙门架横梁上的丝杠螺母机构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1