一种基于竞赛的跨垄式喷药机器人的控制系统
1.本实用新型属于竞赛机器人技术领域,具体涉及一种基于竞赛的跨垄式喷药机器人的控制系统。
背景技术:
2.喷药机器人项目是中国农业机器人大赛的一子项目,参赛机器人应根据仿真果园场地环境,自主规划作业路径,自动识别仿真果树上不同位置的标识,并按要求施加药液。由于比赛路径复杂、靶标喷洒覆盖率不高,导致竞赛任务完成度低。因此,提出一种基于竞赛的跨垄式喷药机器人,又为了使其能自主完成各项竞赛任务,则提出一种与跨垄式喷药机器人相配合的控制系统。
技术实现要素:
3.本实用新型所要解决的技术问题便是针对上述现有技术的不足,提供一种基于竞赛的跨垄式喷药机器人的控制系统,它能够自主运动,自主识别标靶位置并进行自主喷施。
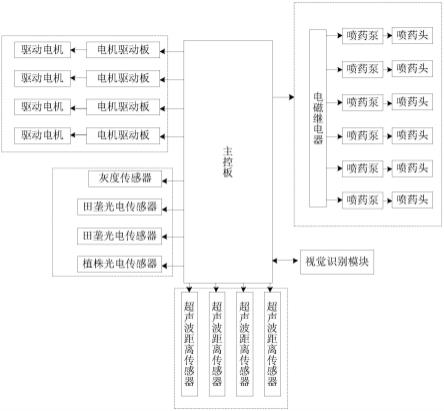
4.本实用新型所采用的技术方案是:一种基于竞赛的跨垄式喷药机器人的控制系统,包括主控板、底盘、和门型的支撑框架,所述底盘包括两个底座,支撑框架相对的两侧分别固定在两个底座上,其中一个底座的外侧中部设有灰度传感器,每个底座底部外侧安装有麦克纳姆轮,内侧安装有万向轮,每个麦克纳姆轮连接一个驱动电机,每个驱动电机设置一块电机驱动板,所述电机驱动板和主控板均固定在底座上,其中一个底座的底部外侧两端还分别安装有田垄光电传感器,田垄光电传感器的检测方向与底座的长度方向平行,两个底座的内侧前端和后端分别对称安装有相对设置的超声波距离传感器,所述支撑框架两侧中部安装有支架,支架上安装有植株光电传感器和视觉识别模块,所述支撑框架上还安装有喷施模块,所述主控板分别与灰度传感器、电机驱动板、田垄光电传感器、超声波距离传感器、植株光电传感器、视觉模块和喷施模块连接。
5.作为优选,所述喷施模块包括储液箱、喷药泵和喷药头,储液箱置于底座上,喷药泵和喷药头分别设有六个,支撑框架一侧设有三个喷药泵和三个喷药头,所述支撑框架一侧的支架中部上竖直设有田垄光电传感器和三个喷药头,另一侧的支架中部上竖直设有视觉识别模块和三个喷药头,所述主控板通过继电器与三个喷药泵连接。
6.作为优选,所述视觉识别模块位于上方的两个喷药头之间。
7.作为优选,所述底座采用u型的双层底座,底座的开口朝向支撑框架的外侧。
8.本实用新型的有益效果在于:
9.(1)采用门型的支撑框架,可以实现跨垄式作业,即田垄位于支撑框架之间的中部,较传统的田垄一侧作业,大大缩短了竞赛路径,缩短了比赛时间;
10.(2)采用麦克纳姆轮,可实现任意方向的平移,无需转向,提高了机器人的灵活度,缩短了比赛的时间;
11.(3)在竖直方向上设置不同高度的喷药头,能针对竞赛中固定的不同高度的作业
物进行喷洒药液,提高了药液喷洒的覆盖率,从而提高了竞赛完成度
12.(4)通过主控板、各个传感器和执行机构,能在预定比赛场地条件下,依照比赛规则,能够实现自主路径规划、自主运动、场地目标位置识别、颜色判断、自主喷施等功能。
13.本实用新型在设定的比赛场景中高完成度的自主完成竞赛任务,且完成任务所需时间短。
附图说明
14.图1为本实用新型的系统框图;
15.图2为本实用新型的结构示意图;
16.图3为本实用新型的竞赛地图。
17.图中:1、主控板;2、支撑框架;3、底座;4、灰度传感器;5、麦克纳姆轮;6、万向轮;7、驱动电机;8、电机驱动板;9、田垄光电传感器;10、超声波距离传感器;11、支架;12、植株光电传感器;13、视觉识别模块;14、储液箱;15、喷药泵;16、喷药头。
具体实施方式
18.下面将结合附图及具体实施例对本实用新型作进一步详细说明。
19.实施例
20.如图1和图2所示,本实施例提供的基于竞赛的跨垄式喷药机器人的控制系统,包括主控板1、底盘、和门型的支撑框架2,所述底盘包括对称设置的底座3,两个底座3均采用u型双层结构,底座3的开口朝向支撑框架2外侧,所述支撑框架2相对的两侧分别固定在两个底座3上,其中一个底座3的外侧中部设有灰度传感器4,该底座3底层表面还固定有主控板1,每个底座3底部外侧安装有麦克纳姆轮5,内侧安装有万向轮6,每个麦克纳姆轮5连接一个驱动电机7,每个驱动电机7设置一块电机驱动板8,所述电机驱动板8固定在底座3底层表面,固定主控板1的底座3的底部外侧两端还分别安装有田垄光电传感器9,田垄光电传感器9的检测方向与底座3的长度方向平行,两个底座3的内侧前端和后端分别对称安装有相对设置的超声波距离传感器10,即前端的两个超声波距离传感器10相对设置,后端的两个超声波距离传感器10相对设置,四个超声波距离传感器10位于同一水平面,所述底座3底层中部还放置有储液箱14;
21.所述支撑框架2底部每侧安装有三个喷药泵15,支撑框架2与底座3连接的两侧中部分别对称安装有支架11,支架11呈t型,其中一个支架11上沿支撑框架2的竖直中线安装有植株光电传感器12和三个喷药头16,另一个支架11上沿支撑框架2的竖直中线安装有视觉识别模块13和三个喷药头16,所述视觉识别模块13采用openmv,且其位于上部两个喷药头16之间,三个喷药头16的高度及其之间的间距与竞赛中植株上竖直方向的标靶位置相匹配,每个喷药头16对应一个喷药泵15,六个喷药泵15通过继电器与主控板1连接,所述主控板1还分别与灰度传感器4、电机驱动板8、田垄光电传感器9、超声波距离传感器10、植株光电传感器12和视觉模块连接。
22.工作原理:
23.如图3所示,以固定主控板1的底座3的外侧作为车头,即以灰度传感器4作为车头,假定机器从竞赛地图的出发点a区驶出,向右行驶,通过灰度传感器4检测地面黑色循迹线,
并将灰度传感器4检测的循迹线情况反馈给主控板1,主控板1判断车体轨迹是否倾斜,若倾斜,则通过相应的电机驱动板8来控制对应驱动电机7的转速,从而保证机器人沿黑色循迹线行驶,当机器人一侧的田垄光电传感器9检测到田垄时,向主控板1发出信号,主控板1根据田垄宽度提前设置有延时程序,通过一定的延时使机器人再沿当前方向移动一定距离后停车,此时田垄位于支撑框架2之间,主控板1通过对应的电机驱动板8控制对应车轮的转向,从而改变机器人的行径方向,使机器人向田垄驶去,当机器人驶入田垄后,两底座3内侧安装的超声波距离距离传感器检测两底座3分别与田垄侧壁之间的距离,并将距离信号传输给主控板1,主控板1控制对应的驱动电机7对机器人作出调整,使得两底座3与田垄之间的距离相同,即田垄位于支撑框架2的中间;从驶入田垄开始,植株光电传感器12进行实时扫描,当植株光电传感器12检测到植株时,主控板1控制驱动电机7停止,机器人停车,再通过视觉模块捕捉植株上位于植株上部的两个像素块,竞赛中植株上的像素块一般有三个,分别位于植株上1.2米、1.0米、0.8米的高度位置处,我们将视觉模块设置在上部的两个喷药头16之间,即视觉模块可对植株上1.2米和1.0米处的像素模块进行静态捕捉,视觉模块捕捉后会产生三种情况,检测到待喷药像素块在1.2米处,检测到待喷药像素块在1.0米处,或者未检测到待喷药像素块,从而将捕捉到的情况反馈给主控板1,主控板1根据视觉模块检测的结果,控制对应喷药头16的喷药泵15工作,为喷药头16供给药液,对相应的喷药区域进行喷药;喷药完成后继续跨垄行驶,当机器人驶出田垄后,灰度传感器4开始检测黑色循迹线,检测到黑色循迹线后开始沿黑色循迹线向d点行驶,当田垄光电传感器9再次检测到田垄后,重复上述操作。
24.上面结合附图对本实用新型进行了示例性的描述,显然本实用新型的实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1