一种潜水推进器的制作方法
[0001]
本实用新型涉及推进器技术领域,具体地说是一种潜水推进器。
背景技术:
[0002]
潜水运动已经越来越普遍,潜水装备中经常见到有各式各样的水下推进器,但这些推进器,通常是手持式或背包式,不论采用什么方式,这些推进器的控制系统均需要潜水员用手直接控制或通过连线控制器来控制推进状态,而无法腾出手来操作其他装备,背包固定式还会导致和气瓶等其他装备冲突;很多的水下推进器只有简单的推进功能,无法做倒退,转向等操作。
技术实现要素:
[0003]
本实用新型为克服现有技术的不足,提供一种潜水推进器,利用腿上的角度控制器,即可进行前进,变速前进,倒退,转弯,原地转向等模式,整个操作过程只依靠潜水员调整大小腿之间夹角控制,完全不需要用手控制。
[0004]
为实现上述目的,设计一种潜水推进器,包括电池、推进器,其特征在于:所述的推进器包括左侧推进器及右侧推进器,左侧推进器及右侧推进器的前部分别采用左侧推进器供电电缆及右侧推进器供电电缆连接腰带式供电电池;左侧推进器及右侧推进器的后部采用左侧角度控制器连接电缆及右侧角度控制器连接电缆分别连接左侧角度控制器及右侧角度控制器;所述的左侧推进器及左侧角度控制器与右侧推进器及右侧角度控制器为左右对称分布。
[0005]
所述的左侧角度控制器与右侧角度控制器的结构一致;左侧角度控制器包括内圆盘、外圆盘,内圆盘与外圆盘的中部采用转轴及螺栓连接;所述的内圆盘的一侧连接内圆盘控制杆的一端,内圆盘控制杆的另一端连接内圆盘曲臂的一端,所述的内圆盘、内圆盘控制杆及内圆盘曲臂为一体式结构;所述的外圆盘的一侧连接外圆盘控制杆的一端,外圆盘控制杆的另一端连接外圆盘曲臂的一端,所述的外圆盘、外圆盘控制杆及外圆盘曲臂为一体式结构。
[0006]
所述的内圆盘内设有圆形凹槽,位于圆形凹槽的底部的中央设有内圆盘中心孔,以内圆盘中心孔为圆心顺时针90
°
的外缘处设有第一凹槽,所述的第一凹槽为圆形凹槽;以内圆盘中心孔为圆心顺时针90
°
~135
°
的外缘处设有第二凹槽,所述的第二凹槽为长条形凹槽;以内圆盘中心孔为圆心顺时针135
°
~180
°
的外缘处设有第三凹槽,所述的第三凹槽由若干圆形凹槽组成;第一凹槽、第二凹槽及第三凹槽内分别设有光电传感器。
[0007]
所述的外圆盘中部设有圆盘形凸台,位于圆盘形凸台的中央设有外圆盘中心孔,以外圆盘中心孔为圆心顺时针180
°
的外缘处设有第四凹槽,所述的第四凹槽位于圆形凹槽,第四凹槽内设有led灯。
[0008]
所述的内圆盘曲臂及外圆盘曲臂的另一端分别设有绑带固定孔。
[0009]
所述的左侧推进器采用左侧推进器固定绑带与左侧大腿根部绑定;右侧推进器采
用右侧推进器固定绑带与右侧大腿根部绑定。
[0010]
所述的左侧角度控制器及右侧角度控制器前后的内圆盘曲臂及外圆盘曲臂分别采用角度控制器固定绑带与大腿及小腿绑定。
[0011]
所述的腰带式供电电池上设有电源控制开关,并且腰带式供电电池通过潜水深度检测器分别与左侧推进器及右侧推进器连接,左侧推进器及右侧推进器连接分别通过继电器控制盒与左侧角度控制器与右侧角度控制器连接;所述的左侧角度控制器与右侧角度控制器内部分别设有光源控制器。
[0012]
本实用新型同现有技术相比,提供一种潜水推进器,利用腿上的角度控制器,即可进行前进,变速前进,倒退,转弯,原地转向等模式,整个操作过程只依靠潜水员调整大小腿之间夹角控制,完全不需要用手控制。
附图说明
[0013]
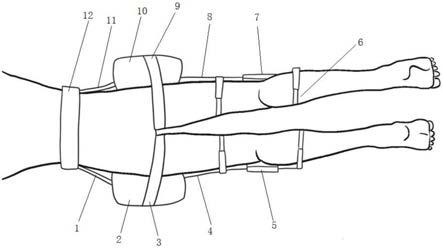
图1为本实用新型安装在潜水员身上状态俯视图。
[0014]
图2为本实用新型安装在潜水员身上状态侧视图。
[0015]
图3为左侧角度控制器及右侧角度控制器分布状态示意图。
[0016]
图4为左侧角度控制器结构示意图。
[0017]
图5为图4中内圆盘结构示意图。
[0018]
图6为图4中外圆盘结构示意图。
[0019]
图7为本实用新型控制连接示意图。
[0020]
图8-图12为本实用新型倒退、静止、变速前进、转弯、原地转向状态示意图。
[0021]
参见图1至图7,1为左侧推进器供电电缆,2为左侧推进器,3为左侧推进器固定绑带,4为左侧角度控制器连接电缆,5为左侧角度控制器,6为角度控制器固定绑带,7为右侧角度控制器,8为右侧角度控制器连接电缆,9为右侧推进器固定绑带,10为右侧推进器,11为右侧推进器供电电缆,12为腰带式供电电池,13为电源控制开关,14为内圆盘控制杆,15为外圆盘,16为外圆盘控制杆,17为外圆盘曲臂,18为转轴及螺栓,19为内圆盘曲臂,20为内圆盘,21为绑带固定孔,22为第一凹槽,23为第二凹槽,24为第三凹槽,25为第四凹槽,26为外圆盘中心孔,27为继电器控制盒,28为潜水深度检测器,29为光源控制器。
具体实施方式
[0022]
下面根据附图对本实用新型做进一步的说明。
[0023]
如图1至7所示,推进器包括左侧推进器2及右侧推进器10,左侧推进器2及右侧推进器10的前部分别采用左侧推进器供电电缆1及右侧推进器供电电缆11连接腰带式供电电池12;左侧推进器2及右侧推进器10的后部采用左侧角度控制器连接电缆4及右侧角度控制器连接电缆8分别连接左侧角度控制器5及右侧角度控制器7;所述的左侧推进器2及左侧角度控制器5与右侧推进器10及右侧角度控制器7为左右对称分布。
[0024]
左侧角度控制器5与右侧角度控制器7的结构一致;左侧角度控制器5包括内圆盘、外圆盘,内圆盘20与外圆盘15的中部采用转轴及螺栓18连接;所述的内圆盘20的一侧连接内圆盘控制杆14的一端,内圆盘控制杆14的另一端连接内圆盘曲臂19的一端,所述的内圆盘20、内圆盘控制杆14及内圆盘曲臂19为一体式结构;所述的外圆盘15的一侧连接外圆盘
控制杆16的一端,外圆盘控制杆16的另一端连接外圆盘曲臂17的一端,所述的外圆盘15、外圆盘控制杆16及外圆盘曲臂17为一体式结构。
[0025]
内圆盘20内设有圆形凹槽,位于圆形凹槽的底部的中央设有内圆盘中心孔21,以内圆盘中心孔21为圆心顺时针90
°
的外缘处设有第一凹槽22,所述的第一凹槽22为圆形凹槽;以内圆盘中心孔21为圆心顺时针90
°
~135
°
的外缘处设有第二凹槽23,所述的第二凹槽23为长条形凹槽;以内圆盘中心孔21为圆心顺时针135
°
~180
°
的外缘处设有第三凹槽24,所述的第三凹槽24由若干圆形凹槽组成;第一凹槽22、第二凹槽23及第三凹槽24内分别设有光电传感器。
[0026]
所有这些凹槽的窗口用均用透明材料密封, 整个内圆盘内部的光电传感器和电路全部独立密封,可以单独防水。
[0027]
外圆盘15中部设有圆盘形凸台,位于圆盘形凸台的中央设有外圆盘中心孔26,以外圆盘中心孔26为圆心顺时针180
°
的外缘处设有第四凹槽25,所述的第四凹槽25位于圆形凹槽,第四凹槽25内设有led灯。
[0028]
第四凹槽25的窗口同样用透明材料密封,led 灯的供电电池安装在外圆盘15的夹层中,整个外圆盘15独立密封,可以单独防水。
[0029]
内圆盘曲臂19及外圆盘曲臂17的另一端分别设有绑带固定孔21。
[0030]
内圆盘20及外圆盘15是组合前状态,内、外圆盘通过内、外中心孔,使用转轴及螺栓18组成一体,组合后保证内、外圆盘可以相对转动,同时外圆盘15上的 led 灯可以随着内、外圆盘的相对转动,分别对准内圆盘20上的几个凹槽位置,触发内圆盘凹槽内不同位置光电传感器处于工作或关闭状态,从而控制推进器的运行状态。
[0031]
左侧推进器2采用左侧推进器固定绑带3与左侧大腿根部绑定;右侧推进器10采用右侧推进器固定绑带9与右侧大腿根部绑定。
[0032]
左侧角度控制器5及右侧角度控制器7前后的内圆盘曲臂19及外圆盘曲臂17分别采用角度控制器固定绑带6与大腿及小腿绑定。
[0033]
腰带式供电电池12上设有电源控制开关13,并且腰带式供电电池12通过潜水深度检测器28分别与左侧推进器2及右侧推进器10连接,左侧推进器2及右侧推进器10连接分别通过继电器控制盒27与左侧角度控制器5与右侧角度控制器7连接;所述的左侧角度控制器5与右侧角度控制器7内部分别设有光源控制器29。
[0034]
本实用新型利用了潜水员标准的潜水姿势,将推进器固定在潜水员的大腿两侧,角度控制器固定在膝关节上,并有二个与控制杆和曲臂连接,控制杆和曲臂分别绑于大小腿内侧,供电电池固定在腰部,推进器的工作状态通过潜水员大小腿之间的夹角进行调整和控制,包括前进,变速前进,倒退,转弯,原地转向等,除了电源总开关之外,整个操作过程只依靠潜水员调整大小腿之间夹角控制,完全不需要用手控制;此外,本实用新型还配有潜水深度检测器,用于监测潜水员的上升速度,上升过快时可以切断推进器的工作状态,防止由于潜水员姿势不正确的无意识上升过快,或在上升过程中上升过快所导致的危险。
[0035]
本实用新型分左右两侧部分,共用一个腰带式供电电池作为电源,腰带式供电电池做成可脱卸式,遇到紧急时刻将电源断电后,可以像潜水员配重袋一样脱卸,扔弃。
[0036]
本实用新型的控制部分称为角度控制器,分左右两个独立的角度控制器,左侧的角度控制器由左边大小腿带动控制左侧的推进器,右测的角度控制器由右边大小腿带动控
制右侧的推进器;角度控制器上固定有控制杆和曲臂,控制杆和曲臂分别用绑带固定于大小腿上,当大小腿的角度改变时,会通过曲臂和控制杆带动角度控制器旋转,让推进器处于不同的工作状态。
[0037]
本实用新型的电缆控制见附图 7,除了共用一个腰带式电池供电外,分左右套控制电路系统,分别对应安装在潜水员左右腿上的两个角度控制器,分别控制左右两个潜水推进器工作。每个位置的光电开关电路连接到一个继电器控制盒上,继电器控制盒连接到对应的推进器上。
[0038]
在供电电池线路上安装有一个潜水深度探测器,在 本实用新型工作时将会自动检测潜水员的上升速度,当潜水员由于姿态不平衡,或者在正常上升过程中,深度探测器发现潜水员的上升速度大于 padi 或其他潜水组织规定的最大上升速度时(比如 9 米/分钟),潜水深度探测器将会自动关闭本实用新型上的角度控制器对推进器的控制,让推进器停止工作,从而避免由于本实用新型的影响造成上升速度过快,让潜水员产生危险的情况发生。
[0039]
本实用新型的工作方式分别见附图 8,附图 9,附图 10,附图 11,通过潜水员大小腿的角度改变,带动角度控制器内圆盘和外圆盘的相对转动位置,控制、改变推进器的工作状态,通过潜水员的大小腿角度变化带动角度控制器的开关,可以让潜水员处于多种不同的潜水状态。
[0040]
倒退状态:见附图 8,当潜水员大小腿处于≤90
°
位置角度时,角度传感器外圆盘的 led 灯位于内圆盘 90
°
凹槽的光电传感器窗口位置,启动推进器倒转工作状态,当潜水员的左右大小腿均处于这一角度时,潜水员可以匀速倒退。
[0041]
静止状态:见附图 9,当潜水员左右大小腿处于 > 90
°ꢀ-ꢀ
≤135
°
角度位置时,角度传感器的外圆盘上 led 灯位于内圆盘 > 90
°ꢀ-ꢀ
≤135
°
凹槽的光电传感器窗口位置,将停止推进器的运转,潜水员处于静止状态。
[0042]
前进状态:见附图 10,当潜水员左右大小腿处于 >135
°ꢀ-ꢀ
≤180
°
角度位置时,角度控制器的外圆盘内 led 灯位于 >135
°ꢀ-ꢀ
≤180
°
上三个或四个凹槽的光电传感器窗口位置,角度越大的凹槽位置代表推进速度越大的挡位,潜水员可以在这一角度范围内,通过大小腿的角度调节来控制推进器的推进速度挡位,当角度达到或接近 180
°
时,推进速度最大。
[0043]
转弯状态:见附图 11,当潜水员需要转弯时,只需将要转向方向的腿收起,让大小腿的夹具保持在> 90
°ꢀ-ꢀ
≤135
°
之间,另外一侧的大小腿夹具保持在 >135
°ꢀ-ꢀ
≤180
°
之间,就可以在一侧推进器的推动下实现转弯。
[0044]
原地转向状态:见附图 12,当潜水员需要原地转向时,只需要将一个大小腿的夹角 ≤90
°ꢀ
(该侧推进器倒转状态),另外一个大小腿的夹角保持在 >135
°ꢀ-ꢀ
≤180
°
(该侧推进器前进状态),就可以实现潜水员的原地旋向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1