一种自动贴墙砖的机械装置及其使用方法与流程
[0001]
本发明属于电气技术领域,涉及到一种自动贴墙砖的机械装置及其使用方法。
背景技术:
[0002]
目前,在建筑工程装饰装修的过程中,墙面大多数使用墙砖,干净整洁,易于清理,现有技术大多由人工将墙砖通过混凝土粘在墙面上,但由于人工操作存在着很大的不规范性,容易是墙砖安装不规范,易产生空隙或者墙砖损坏的情况,造成损失,况且在巨大的工作压力下,容易影响工人的身体健康,并且工作效率低。
技术实现要素:
[0003]
为解决上述问题,本发明一种自动贴墙砖的机械装置及其使用方法,所述机械装置通过电气自动化技术能够将涂抹好的墙砖贴在墙面上。
[0004]
本发明具体为一种自动贴墙砖的机械装置,所述装置包括转动装置、伺服电机、控制柜、压缩机和机械臂;所述转动装置安装在装置内,所述控制柜安装在装置的左下侧,所述伺服电机和压缩机安装在装置的底端,所述机械臂安装在装置的右侧。
[0005]
所述机械臂的右侧安装了橡胶吸盘,所述橡胶吸盘下端安装承载杆,所述承载杆通过弹簧安装在机械臂上;所述机械臂内安装了管道,所述管道为t形分支,所述管道的一个分支与外部空气相连,并安装了电磁阀,所述管道的另一个分支通过金属软管与压缩机相连,并安装了电磁阀;所述机械臂的管道内安装压力传感器。
[0006]
进一步的所述电磁阀的线圈通过连接线与中间继电器的常开触点和直流电源24v电性相接。
[0007]
进一步的所述压力传感器通过连接线与模拟量输入模块的输入端电性相接。
[0008]
所述转动装置安装了转轴,所述转轴上安装了齿轮,所述齿轮与机械臂左侧啮合。
[0009]
所述伺服电机上安装了转动齿轮,所述转动齿轮与转动装置上的。
[0010]
进一步的所述伺服电机包括脉冲输入端和电源输入端,所述脉冲输入端通过连接线与位置控制模块中的脉冲输出端电性相接,所述电源输入端通过连接线与中间继电器的常开触点和交流电源220v电性相接。
[0011]
所述控制柜上安装了触摸屏,所述控制柜内安装了空气开关、开关电源、plc200和中间继电器;所述开关电源能够输出直流电源24v,所述中间继电器包括线圈触点和中间继电器常开触点;所述开关电源接入交流电源220v,并通过连接线与开关电源的电源输入端电性相接。
[0012]
进一步的所述plc200包括cpu模块、模拟量输入模块和位置控制模块;所述cpu模块包括电源输入端、数字量输出端和通讯端口,所述电源输入端接入直流电源24v,所述数字量输出端口通过连接线与中间继电器的线圈触点电性相接;所述位置控制模块包括电源输入端和脉冲输出端,所述电源输入端接入直流电源24v;所述模拟量输入模块包括电源输入端和模拟量输入端,所述电源输入端接入直流电源24v。
[0013]
进一步的所述触摸屏通过连接线接入直流电源24v,所述触摸屏通过通讯线与cpu模块通讯端口相连。
[0014]
本发明还包括一种自动贴墙砖的机械装置的使用方法,步骤如下:
[0015]
步骤1:闭合控制柜中的空气开关,使控制柜内的plc200和触摸屏通电运行;
[0016]
步骤2:通过触摸屏关闭机械臂与空气之间电磁阀,同时打开机械臂与空气压缩机处的电磁阀,对机械臂中的橡胶吸盘对墙砖的正面进行吸附;
[0017]
步骤3:通过触摸屏控制机械臂的旋转方向,使墙砖正对着墙面;
[0018]
步骤4:通过触摸屏打开机械臂与空气之间电磁阀,同时闭合机械臂与空气压缩机处的电磁阀,使橡胶吸盘内通入空气,橡胶吸盘复位的同时通过弹力将墙砖粘贴在墙面内。
附图说明
[0019]
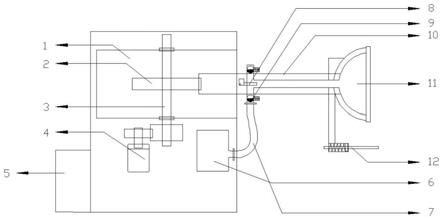
图1为发明一种自动贴墙砖的机械装置内部结构示意图;
[0020]
图2为发明一种自动贴墙砖的机械装置控制柜内示意图。
[0021]
图中:1、转动装置;2、齿轮;3、转轴;4、伺服电机;5、控制柜;6、压缩机;7、金属软管;8、压力传感器;9、电磁阀;10、机械臂;11、橡胶吸盘;12、承载杆;13、空气开关;14、开关电源;15、cpu模块;16、模拟量输入模块;17、位置控制模块;18、中间继电器;19、触摸屏。
具体实施方式
[0022]
下面结合附图对发明一种自动贴墙砖的机械装置及其使用方法具体实施方式做详细阐述。
[0023]
如图1所示,本发明具体为一种自动贴墙砖的机械装置及其使用方法,所述装置包括转动装置1、伺服电机4、控制柜5、压缩机6和机械臂10;所述转动装置1安装在装置内,所述控制柜5安装在装置的左下侧,所述伺服电机4和压缩机6安装在装置的底端,所述机械臂10安装在装置的右侧。
[0024]
其中所述机械臂10的右侧安装了橡胶吸盘11,所述橡胶吸盘11下端安装承载杆12,所述承载杆12通过弹簧安装在机械臂10上;所述机械臂10内安装了管道,所述管道为t形分支,所述管道的一个分支与外部空气相连,并安装了电磁阀9,所述管道的另一个分支通过金属软管7与压缩机6相连,并安装了电磁阀9;所述机械臂10的管道内安装压力传感器8。进一步的所述电磁阀9的线圈通过连接线与中间继电器18的常开触点和直流电源24v电性相接。进一步的所述压力传感器8通过连接线与模拟量输入模块16的输入端电性相接。
[0025]
其中所述转动装置1安装了转轴3,所述转轴3上安装了齿轮2,所述齿轮2与机械臂10左侧啮合。
[0026]
其中所述伺服电机4上安装了转动齿轮2,所述转动齿轮2与转动装置1上的。进一步的所述伺服电机4包括脉冲输入端和电源输入端,所述脉冲输入端通过连接线与位置控制模块17中的脉冲输出端电性相接,所述电源输入端通过连接线与中间继电器18的常开触点和交流电源220v电性相接。
[0027]
如图2所示,其中所述控制柜5上安装了触摸屏19,所述控制柜5内安装了空气开关13、开关电源14、plc200和中间继电器18;所述开关电源14能够输出直流电源24v,所述中间继电器18包括线圈触点和中间继电器18常开触点;所述开关电源14接入交流电源220v,并
通过连接线与开关电源14的电源输入端电性相接。进一步的所述plc200包括cpu模块15、模拟量输入模块16和位置控制模块17;所述cpu模块15包括电源输入端、数字量输出端和通讯端口,所述电源输入端接入直流电源24v,所述数字量输出端口通过连接线与中间继电器18的线圈触点电性相接;所述位置控制模块17包括电源输入端和脉冲输出端,所述电源输入端接入直流电源24v;所述模拟量输入模块16包括电源输入端和模拟量输入端,所述电源输入端接入直流电源24v。进一步的所述触摸屏19通过连接线接入直流电源24v,所述触摸屏19通过通讯线与cpu模块15通讯端口相连。
[0028]
本发明还包括一种自动贴墙砖的机械装置的使用方法,步骤如下:
[0029]
步骤1:闭合控制柜5中的空气开关13,使控制柜5内的plc200和触摸屏19通电运行;
[0030]
步骤2:通过触摸屏9关闭机械臂10与空气之间电磁阀9,同时打开机械臂与空气压缩机处的电磁阀9,对机械臂10中的橡胶吸盘11对墙砖的正面进行吸附;
[0031]
步骤3:通过触摸屏9控制机械臂10的旋转方向,使墙砖正对着墙面;
[0032]
步骤4:通过触摸屏9打开机械臂10与空气之间电磁阀9,同时闭合机械臂与空气压缩机处的电磁阀9,使橡胶吸盘11内通入空气,橡胶吸盘11复位的同时通过弹力将墙砖粘贴在墙面内。
[0033]
最后应该说明的是,结合上述实施例仅说明本发明的技术方案而非对其限制。所属领域的普通技术人员应当理解到,本领域技术人员可以对本发明的具体实施方式进行修改或者等同替换,但这些修改或变更均在申请待批的权利要求保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1