一种解决高空风险作业的爬壁机器人的制作方法
1.本实用新型涉及爬壁机器人技术领域,具体而言,涉及一种解决高空风险作业的爬壁机器人。
背景技术:
2.近年来,随着我国风电的大量普及,风电塔筒维护的工程量随之加大。由于这些塔筒高度和体积较大,在风电塔筒表面进行清洁、防腐除锈及表面图案更改维护往往需要人工高空作业。通常情况下的风电塔筒、管道和储存罐、船只等钢铁制品的维护、清洁、除锈、喷涂等都是利用吊篮或吊板为作业平台,人工高空作业。人工高空作业中存在受天气等因素影响大,作业风险高、费用高等问题,且高空作业效率较低。
3.公开号cn210253423u的专利公开了一种爬壁清洁机器人,包括机器人主体,所述机器人主体的底部设置有履带底盘,所述履带底盘包括履带,所述履带上均布有多个磁铁,所述机器人主体的前侧可拆装地连接有刷头机构或吸尘机构。可以替代人在罐体或者金属墙体表面进行清洁作业,可以通过远程操作终端进行远程操作,可以沿大型容器表面向垂直、水平各方向爬行,并可以跨越小的焊缝,可以有效清洁容器表面的灰尘、污渍,可以采集罐体表面视频信息,不划伤漆面、防坠落,降低了高空作业的风险,提高了罐体或者金属墙体的清洁水平,提高了工人在危险环境下作业的安全性。
4.但是,这种爬壁清洁机器人在履带上安装磁铁进行吸附,为了爬壁机器人稳定地在壁面上移动,磁铁需要较大的磁力,当履带滚动时,需要较大的动力来使得履带与金属分离,造成能源的大量消耗。
技术实现要素:
5.本实用新型的目的在于提供一种解决高空风险作业的爬墙机器人,其能够代替人工在高空进行清洗作业,同时降低能耗,延长机器人工作时间。
6.本实用新型的实施例通过以下技术方案实现:
7.一种解决高空风险作业的爬壁机器人,包括主体单元、动力单元、移动单元、探测单元、喷射单元;主体单元包括箱体;移动单元包括一对履带,一履带设置于主体单元一侧,另一履带设置于主体单元另一侧;履带外侧均匀设置有多个电磁吸盘,电磁吸盘与吸盘控制电路电连接;喷射单元包括可转动方向的清洁臂。
8.进一步地,清洁臂包括底座、旋转台、支座、第一支臂和第二支臂;底座固定设置于箱体的上表面,旋转台与底座转动连接,支座与旋转台顶部固定连接;第一支臂一端与支座铰接,另一端与第二支臂铰接;第二支臂远离第一支臂的一端设置有高压水枪。
9.进一步地,旋转台配设有第一电机,第一电机用以驱动旋转台在箱体上表面以竖直方向为轴心自由旋转。
10.进一步地,移动单元还包括一对第一齿轮、一对第二齿轮以及用以驱动第一齿轮转动的第二电机,一履带绕设于一第一齿轮和一第二齿轮,且与第一齿轮和第二齿轮啮合;
第一齿轮的直径大于第二齿轮的直径。
11.进一步地,第一支臂为弯折臂,第一支臂远离支座的一端向前进方向弯折。
12.进一步地,探测单元包括摄像头和伸缩杆,伸缩杆一端与箱体上表面固定连接,另一端与摄像头固定连接,伸缩杆配设有用以驱动伸缩杆伸缩的第三电机。
13.进一步地,箱体上表面设置有水箱,水箱与高压水枪通过管道连通。
14.进一步地,探测单元还包括传感器,传感器设置于箱体上表面,传感器位于清洁臂和伸缩杆的前方或者侧面。
15.进一步地,箱体底部设置有若干个清洁刷,清洁刷包括多组离散的刷毛簇,箱体底部设置有用以驱动清洁刷转动的第四电机。
16.本实用新型实施例的技术方案至少具有如下优点和有益效果:
17.本实用新型提供的解决高空风险作业的爬壁机器人,使用时,电机驱动履带转动,履带上的电磁吸盘由控制电路控制,在即将接触壁面时产生磁力,在即将远离壁面时磁力消失,使得整个机器人稳定地在金属壁面上移动,同时不会给履带的滚动带来负担,降低能耗,延长机器人的工作时间;还设置有可转动方向的清洁臂,在机器人活动的过程中,对活动范围内的壁面进行多方向充分的清洁,能够替代人工作业,解决高空风险作业的问题,提高工作效率。
附图说明
18.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
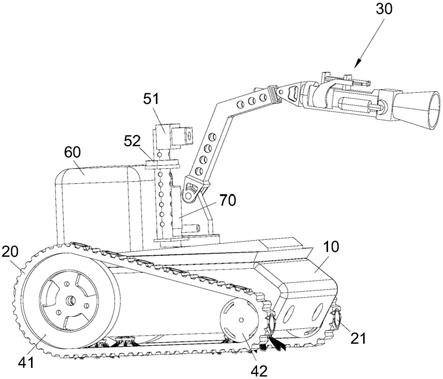
19.图1为本实用新型实施例1提供的解决高空风险作业的爬壁机器人的结构示意图;
20.图2为本实用新型实施例1提供的解决高空风险作业的爬壁机器人的清洁臂的结构示意图;
21.图3为本实用新型实施例1提供的解决高空风险作业的爬壁机器人的仰视图。
22.图标:
23.10
‑
箱体,20
‑
履带,21
‑
电磁吸盘,30
‑
清洁臂,31
‑
底座,32
‑
旋转台,33
‑
支座,34
‑
第一支臂,35
‑
第二支臂,36
‑
高压水枪,41
‑
第一齿轮,42
‑
第二齿轮,51
‑
摄像头,52
‑
伸缩杆,60
‑
水箱,70
‑
传感器,80
‑
清洁刷,81
‑
刷毛簇。
具体实施方式
24.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
25.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都
属于本实用新型保护的范围。
26.在本发明的描述中,需要说明的是,若出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
28.实施例1
29.如附图1~附图3所示,本实施例提供了一种解决高空风险作业的爬壁机器人,包括主体单元、动力单元、移动单元、探测单元、喷射单元;主体单元包括箱体10;移动单元包括一对履带20,一履带20设置于主体单元一侧,另一履带20设置于主体单元另一侧;履带20外侧均匀设置有多个电磁吸盘21,电磁吸盘21与吸盘控制电路电连接;喷射单元包括可转动方向的清洁臂30。
30.使用时,电机驱动履带20转动,履带20上的电磁吸盘21由控制电路控制,在即将接触壁面时产生磁力,在即将远离壁面时磁力消失,使得整个机器人稳定地在金属壁面上移动,同时不会给履带20的滚动带来负担,降低能耗,延长机器人的工作时间;还设置有可转动方向的清洁臂30,在机器人活动的过程中,对活动范围内的壁面进行多方向充分的清洁,能够替代人工作业,解决高空风险作业的问题,提高工作效率。
31.如附图2所示,清洁臂30包括底座31、旋转台32、支座33、第一支臂34和第二支臂35;底座31固定设置于箱体10的上表面,旋转台32与底座31转动连接,支座33与旋转台32顶部固定连接;第一支臂34一端与支座33铰接,另一端与第二支臂35铰接;第二支臂35远离第一支臂34的一端设置有高压水枪36。在爬壁机器人行驶时,高压水枪36通过第一支臂34和第二支臂35能够上下摆动,通过旋转台32能够左右摆动,使得爬壁机器人有较大的清洗面积。
32.本实施例中,旋转台32配设有第一电机,第一电机用以驱动旋转台32在箱体10上表面以竖直方向为轴心自由旋转。旋转台32使得清洁臂30能够360度自由旋转,爬壁机器人工作时清洁臂30可以根据需要转动到不同的角度进行冲洗,提高清洁效果。
33.本实施例中,移动单元还包括一对第一齿轮41、一对第二齿轮42以及用以驱动第一齿轮41转动的第二电机,一履带20绕设于一第一齿轮41和一第二齿轮42,且与第一齿轮41和第二齿轮42啮合;第一齿轮41的直径大于第二齿轮42的直径。第一齿轮41的转轴与第二齿轮42的转轴平行,爬壁机器人工作时,电机驱动第一齿轮41转动,第一齿轮41带动履带20和第二齿轮42转动,从而为爬壁机器人的前进提供动力。
34.本实施例中,第一支臂34为弯折臂,第一支臂34远离支座33的一端向前进方向弯折。清洁臂30向机器人前进方向弯折,使得清洁臂30需要调整的角度范围变小,降低能耗,重心向箱体10中心移动,机器人行驶更加稳定。
35.本实施例中,探测单元包括摄像头51和伸缩杆52,伸缩杆52一端与箱体10上表面固定连接,另一端与摄像头51固定连接,伸缩杆52配设有用以驱动伸缩杆52伸缩的第三电机。摄像头51与地面平板电脑蓝牙连接,使用时,工作人员可以通过摄像头51观察塔表面的清洗情况以及对叶片的每个部分进行详细检查。作为优选的,本实施例的伸缩杆52可以在长度方向上伸缩还可以左右转动,对各个方向进行拍摄。
36.本实施例中,箱体10上表面设置有水箱60,水箱60与高压水枪36通过管道连通。爬壁机器人工作时,自带储水的水箱60,无需外部连接水源,机器人的移动更加自由。
37.本实施例中,探测单元还包括传感器70,传感器70设置于箱体10上表面,传感器70位于清洁臂30和伸缩杆52的前方或者侧面。传感器70能够检测周围的情况给机器人移动的方向提供数据,无需人工控制即可自动完成清洁;传感器70设置时应当避免在机器人上前方有遮挡,影响传感器70的效果。
38.如附图3所示,箱体10底部设置有若干个清洁刷80,清洁刷80包括多组离散的刷毛簇81,箱体10底部设置有用以驱动清洁刷80转动的第四电机。刷毛为纤维状,作为优选的,本实施例选用合成纤维,当清洁刷80转动时,刷毛簇81的端部在壁面旋转能够对壁面清洁。
39.综上所述,本实施例提供的解决高空风险作业的爬壁机器人能够代替人工对风电设备进行清洁,能耗小,效果佳,具有实用性。
40.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1