一种陶瓷餐具加工用往复式四柱冲压机的制作方法
1.本实用新型涉及冲压机技术领域,具体为一种陶瓷餐具加工用往复式四柱冲压机。
背景技术:
2.冲压是靠压力机和模具对板材、带材、管材和型材等施加外力,使之产生塑性变形或分离,从而获得所需形状和尺寸的工件(冲压件)的成形加工方法,对于陶瓷餐具加工也需要用到冲压装置,但是,现有的陶瓷餐具加工用往复式四柱冲压机存在许多问题或缺陷:
3.第一,现有的陶瓷餐具加工用往复式四柱冲压机安全性不好,存在一定的安全隐患;
4.第二,现有的陶瓷餐具加工用往复式四柱冲压机固定模具不好,容易导致模具发生移动;
5.第三,现有的陶瓷餐具加工用往复式四柱冲压机取出产品不方便,实用性不强。
技术实现要素:
6.本实用新型的目的在于提供一种陶瓷餐具加工用往复式四柱冲压机以解决上述背景技术中提出的安全性不好、固定模具效果不好和取出产品不方便的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种陶瓷餐具加工用往复式四柱冲压机,包括顶机体、底部机体、连接体和控制面板,所述底部机体的底部通过螺钉固定安装有支脚,所述底部机体的右侧焊接有连接体,所述底部机体顶部的两侧设置有导向柱,所述导向柱的顶部固定安装有顶机体,且顶机体顶部的中心位置通过螺钉固定安装有第一气缸,所述导向柱上滑动设置有压板,所述第一气缸的底端连接在压板的顶部。
8.优选的,所述顶机体的底部通过螺钉固定安装有上模具,底部机体顶部的背部通过螺钉固定安装有第二电机,第二电机的一端通过连轴器连接有丝杠,第二电机起到了提供动力的目的。
9.优选的,所述底部机体顶部的两侧通过内六角螺栓固定安装有导轨,且导轨的顶部滑动设置有滑块,滑块的顶部通过螺钉固定安装有移动平台,导轨起到了方便滑动的目的。
10.优选的,所述丝杠的顶部通过螺纹与移动平台的底部相互接触,移动平台的顶部放置有下模具,丝杠起到了传动的目的。
11.优选的,所述移动平台顶部的前部和后部设置有挡块,挡块上活动设置有固定螺栓,固定螺栓的顶部压在下模具上,固定螺栓起到了固定的目的。
12.优选的,所述移动平台顶部的两侧设置有固定机构,底部机体的右侧设置有连接体,且连接体的外部通过螺钉固定安装有控制面板,控制面板起到了控制的目的。
13.优选的,所述固定机构的内部依次设置有夹板、连接块、移动螺栓和调节螺母,连接块固定在移动平台上,连接块的依次活动设置有调节螺母,调节螺母的内部活动设置有
移动螺栓,移动螺栓上活动设置有夹板,夹板的一侧与下模具相互接触,固定机构起到了固定的目的。
14.优选的,所述连接体内部设置有第一电机,第一电机的输出端连接有第一臂,第一臂的一端活动设置有第二臂,第二臂的一端活动设置有第三臂,第三臂的一端活动设置有第四臂,第四臂的一端活动设置有气动夹爪,第二臂的内部通过轴活动设置有第二气缸,第二气缸的一端通过轴活动设置在第三臂上,第三臂的内部活动设置有第三气缸,第三气缸的一端通过轴活动设置在第四臂的内部,第一电机起到了提供动力的目的。
15.与现有技术相比,本实用新型的有益效果是:该陶瓷餐具加工用往复式四柱冲压机结构合理,具有以下优点:
16.(1)通过设置有移动平台、导轨、第二电机、丝杠和滑块实现了安全性高的目的,现有的装置安全性不高,因此,使用时,通过启动第二电机,第二电机就会带动丝杠转动,丝杠就会带动移动平台在导轨上移动,从而把移动平台移出,这时,工作人员可以进行维修或安装模具,从而防止工作人员进入到机器中进行维修,提高了装置的安全性。
17.(2)通过设置有压板、夹板、连接块、移动螺栓和滑块实现了固定模具方便的目的,现有的装置固定模具不方便,因此,使用时通过把下模具放到移动平台上,通过转动调节螺母,调节螺母带动移动螺栓运动,移动螺栓就会使夹板移动,从而夹板就会夹持下模具,然后通过把挡块安装到移动平台上,通过转动固定螺栓对下模具进行固定,实现了对模具进行固定的目的。
18.(3)通过设置有第一电机、第一臂、第二臂、第二气缸、第三臂、气动夹爪、第四臂和第三气缸实现了取料方便的目的,现有的装置取料不方便,因此,使用时,通过启动第二气缸和第三气缸使第三臂和第四臂伸入到机器中,然后通过启动气动夹爪,气动夹爪就会夹持产品,然后装置收缩,通过启动第一电机,第一电机就会使装置旋转到合适的位置,然后把产品放下,实现了取出产品方便的目的。
附图说明
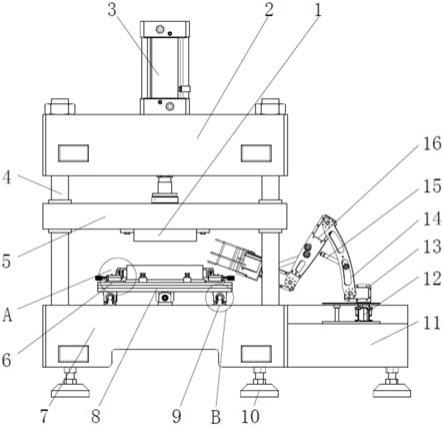
19.图1为本实用新型的正视内部结构示意图;
20.图2为本实用新型的正视外部结构示意图;
21.图3为本实用新型的局部俯视结构示意图;
22.图4为本实用新型的图1中a放大结构示意图;
23.图5为本实用新型的图1中b处放大结构示意图。
24.图6为本实用新型的系统框图。
25.图中:1、上模具;2、顶机体;3、第一气缸;4、导向柱;5、压板;6、固定机构;601、夹板;602、连接块;603、移动螺栓;604、调节螺母;7、底部机体;8、移动平台;9、导轨;10、支脚;11、连接体;12、第一电机;13、第一臂;14、第二臂;15、第二气缸;16、第三臂;17、下模具;18、固定螺栓;19、挡块;20、气动夹爪;21、第四臂;22、控制面板;23、第三气缸;24、第二电机;25、丝杠;26、滑块。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.请参阅图1
‑
6,本实用新型提供的一种实施例:一种陶瓷餐具加工用往复式四柱冲压机,包括顶机体2、底部机体7、连接体11和控制面板22,底部机体7的底部通过螺钉固定安装有支脚10,底部机体7的右侧焊接有连接体11,底部机体7顶部的两侧设置有导向柱4,导向柱4的顶部固定安装有顶机体2,且顶机体2顶部的中心位置通过螺钉固定安装有第一气缸3,导向柱4上滑动设置有压板5,第一气缸3的底端连接在压板5的顶部;
28.顶机体2的底部通过螺钉固定安装有上模具1,底部机体7顶部的背部通过螺钉固定安装有第二电机24,第二电机24的一端通过连轴器连接有丝杠25;
29.底部机体7顶部的两侧通过内六角螺栓固定安装有导轨9,且导轨9的顶部滑动设置有滑块26,滑块26的顶部通过螺钉固定安装有移动平台8;
30.使用时,通过启动第二电机24,第二电机24就会带动丝杠25转动,丝杠25就会带动移动平台8在导轨9上移动,从而把移动平台8移出,这时,工作人员可以进行维修或安装模具,从而防止工作人员进入到机器中进行维修,提高了装置的安全性;
31.丝杠25的顶部通过螺纹与移动平台8的底部相互接触,移动平台8的顶部放置有下模具17;
32.移动平台8顶部的前部和后部设置有挡块19,挡块19上活动设置有固定螺栓18,固定螺栓18的顶部压在下模具17上;
33.移动平台8顶部的两侧设置有固定机构6,底部机体7的右侧设置有连接体11,且连接体11的外部通过螺钉固定安装有控制面板22;
34.固定机构6的内部依次设置有夹板601、连接块602、移动螺栓603和调节螺母604,连接块602固定在移动平台8上,连接块602的依次活动设置有调节螺母604,调节螺母604的内部活动设置有移动螺栓603,移动螺栓603上活动设置有夹板601,夹板601的一侧与下模具17相互接触;
35.使用时通过把下模具17放到移动平台8上,通过转动调节螺母604,调节螺母604带动移动螺栓603运动,移动螺栓603就会使夹板601移动,从而夹板601就会夹持下模具17,然后通过把挡块19安装到移动平台8上,通过转动固定螺栓18对下模具17进行固定,实现了对模具进行固定的目的;
36.连接体11内部设置有第一电机12,第一电机12的输出端连接有第一臂13,第一臂13的一端活动设置有第二臂14,第二臂14的一端活动设置有第三臂16,第三臂16的一端活动设置有第四臂21,第四臂21的一端活动设置有气动夹爪20,第二臂14的内部通过轴活动设置有第二气缸15,第二气缸15的一端通过轴活动设置在第三臂16上,第三臂16的内部活动设置有第三气缸23,第三气缸23的一端通过轴活动设置在第四臂21的内部;
37.使用时,通过启动第二气缸15和第三气缸23使第三臂16和第四臂21伸入到机器中,然后通过启动气动夹爪20,气动夹爪20就会夹持产品,然后装置收缩,通过启动第一电机12,第一电机12就会使装置旋转到合适的位置,然后把产品放下,实现了取出产品方便的目的。
38.控制面板22的输出端通过导线与第一电机12、第二电机24、第一气缸3、第二气缸15和第三气缸23的输入端电性连接,第一电机12的型号可为y90s
‑
2,第二电机24的型号可
为y90l
‑
2,第一气缸3的型号可为j64rt2univer,第二气缸15的型号可为sfr
‑3‑
90,第三气缸23的型号可为sfr
‑3‑
180。
39.工作原理:使用时,通过启动第二电机24,第二电机24就会带动丝杠25转动,丝杠25就会带动移动平台8在导轨9上移动,从而把移动平台8移出,这时,工作人员可以进行维修或安装模具,从而防止工作人员进入到机器中进行维修,通过把下模具17放到移动平台8上,通过转动调节螺母604,调节螺母604带动移动螺栓603运动,移动螺栓603就会使夹板601移动,从而夹板601就会夹持下模具17,然后通过把挡块19安装到移动平台8上,通过转动固定螺栓18对下模具17进行固定,然后移动平台8移入到机器中,通过启动第一气缸3,第一气缸3就会使压板5下压进行冲压,通过启动第二气缸15和第三气缸23使第三臂16和第四臂21伸入到机器中,然后通过启动气动夹爪20,气动夹爪20就会夹持产品,然后装置收缩,通过启动第一电机12,第一电机12就会使装置旋转到合适的位置,然后把产品放下,实现了取出产品方便的目的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1